
一种跳跃度可调的仿生弹跳装置.pdf

努力****梓颖

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种跳跃度可调的仿生弹跳装置.pdf
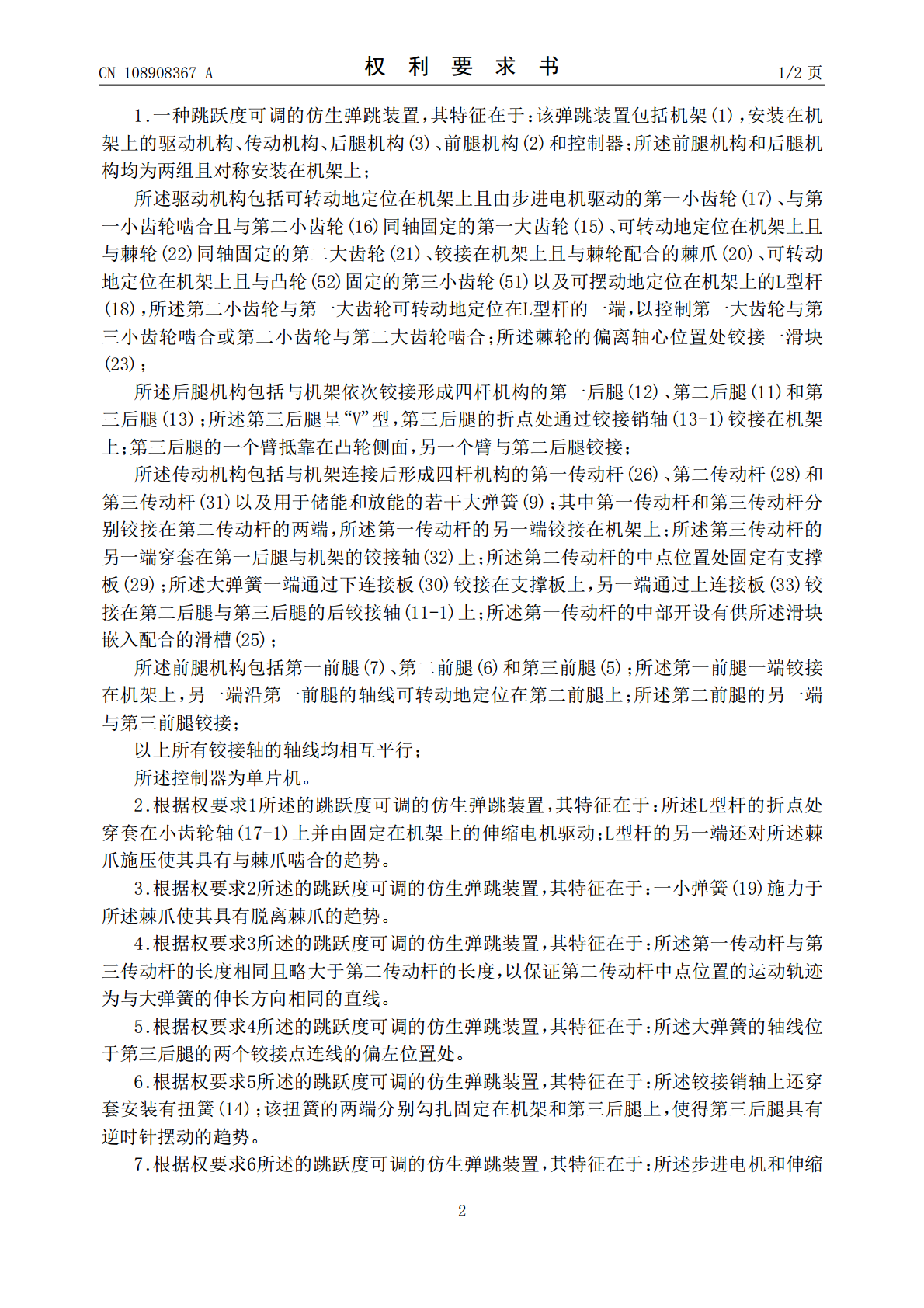
本发明涉及机器人技术领域。技术方案是:一种跳跃度可调的仿生弹跳装置,其特征在于:该弹跳装置包括机架,安装在机架上的驱动机构、传动机构、后腿机构、前腿机构和控制器;所述前腿机构和后腿机构均为两组且对称安装在机架上;所述驱动机构包括可转动地定位在机架上且由步进电机驱动的第一小齿轮、与第一小齿轮啮合且与第二小齿轮同轴固定的第一大齿轮、可转动地定位在机架上且与棘轮同轴固定的第二大齿轮、铰接在机架上且与棘轮配合的棘爪、可转动地定位在机架上且与凸轮固定的第三小齿轮、以及可摆动地定位在机架上的L型杆。该弹跳装置能实现跳

跳跃度可调的仿生弹跳机构.pdf
本发明公开了一种跳跃度可调的仿生弹跳机构,机构采用变传动齿轮上置五杆闭链形式,包括调姿-储能机构、跳跃度调节机构、脚底转向机构、齿轮锁定-释放机构和小腿锁死机构;该机构是从其弹跳机构特性上实现跳高度和跳远度的调节控制,而且可用于弹跳机器人能够实现转向的,并且跳跃度可以调节的仿生弹跳机构。本发明通过改变机构中齿轮对的传动比,使机构得到不同的跳跃轨迹,从而达到控制机构跳高度和跳远度的目标,当传动比为1时,机构能够越过较高的障碍物,当传动比为6时,机构能越过较远的障碍物,当传动比介于两者之间时,机构的跳跃性能也

一种仿生腿式弹跳实验装置.pdf
本发明一种仿生腿式弹跳实验装置包括框架部分、躯干部分、大腿部分、膝关节部分、小腿部分、脚掌部分和装置驱动控制系统;装置驱动控制系统用于驱动和控制整个实验装置的运行;本发明以两液压缸驱动弹跳装置,利用液压驱动输出力大的特点提高了装置的承载能力;以齿轮‑五杆机构丰富的运动特性模拟特定生物关节运动瞬时曲率中心轨迹,使装置步态更加贴近生物的跳跃运动,从而为研究瞬时曲率中心轨迹对跳跃性能的影响提供了实验平台;本发明以液压驱动和弹簧驱动相结合的形式作为机器人的弹性驱动器,能够将较小功率的液压系统的输出能量存储之后,周

一种仿生跳蚤跳跃辅助装置.pdf
本发明公开了一种仿生跳蚤跳跃辅助装置,包括装置主体、上护壳、电机、蓄电池、开关和支撑杆,所述装置主体的顶端设有上护壳,且上护壳外表面一侧贴设有刮杆,所述刮杆内侧胶粘有海绵垫,所述刮杆底端固定有第一滑块,所述刮杆底端开设有与第一滑块配合的第一滑槽,所述刮杆顶端固定有转动块,且转动块套接有第一转动杆。本发明保证操作者在使用该装置时始终能够看清前方,解决了现有的跳跃辅助装置不能保证操作者使用时前方视野良好的问题,通过移动槽形变产生的弹性势能进行缓冲,解决了现有的支撑杆在落地时与地面的所受冲击力较大的问题,进一步

储能可调的齿轮-五杆仿生弹跳机构.pdf
一种储能可调的齿轮-五杆仿生弹跳机构,伺服电机(3)固定在躯干(1)一端,其输出轴与丝杠(19)连接;丝杠上依次套装复位弹簧挡块(41)、复位弹簧(38)、小锥齿轮(11)、丝杠光杠段轴承(16)、螺母(18)和丝杠螺纹段轴承(20)。通过曲柄-滑块机构带动小锥齿轮沿丝杠移动,实现小锥齿轮与大锥齿轮(7)啮合与分离。释放舵机(2)和姿态调整舵机(9)均与躯干固连。摇杆(10)两端分别与曲柄(8)的输出端和摇杆转轴铰接。大腿(32)、小腿(29)、支撑腿(25)和脚平板(26)位于躯干下方。本发明通过姿态调