
一种无人车的轨迹跟随控制方法、控制系统及相关装置.pdf

高格****gu


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人车的轨迹跟随控制方法、控制系统及相关装置.pdf
本申请所提供的一种无人车的轨迹跟随控制方法,包括:利用车辆运动学,建立无人车的运动模型,并依次进行泰勒展开、积分处理和递推处理,得到预测误差函数;接着确定以输入量为自变量的目标函数,然后将目标函数转换为以输入增量为自变量的函数以确定期望值,将期望值输入至驱动系统、制动系统和转向系统,实现无人车的轨迹跟随控制。本申请将对状态的约束、输入和输入变化率与输出的约束转化为对输入增量的约束,将非线性二次规划问题转化为线性二次规划问题进行求解,相对于传统控制算法,具有计算复杂度低且控制误差相近的优点。本申请还提供一种
一种无人车的轨迹跟随控制方法、控制系统及相关装置.pdf
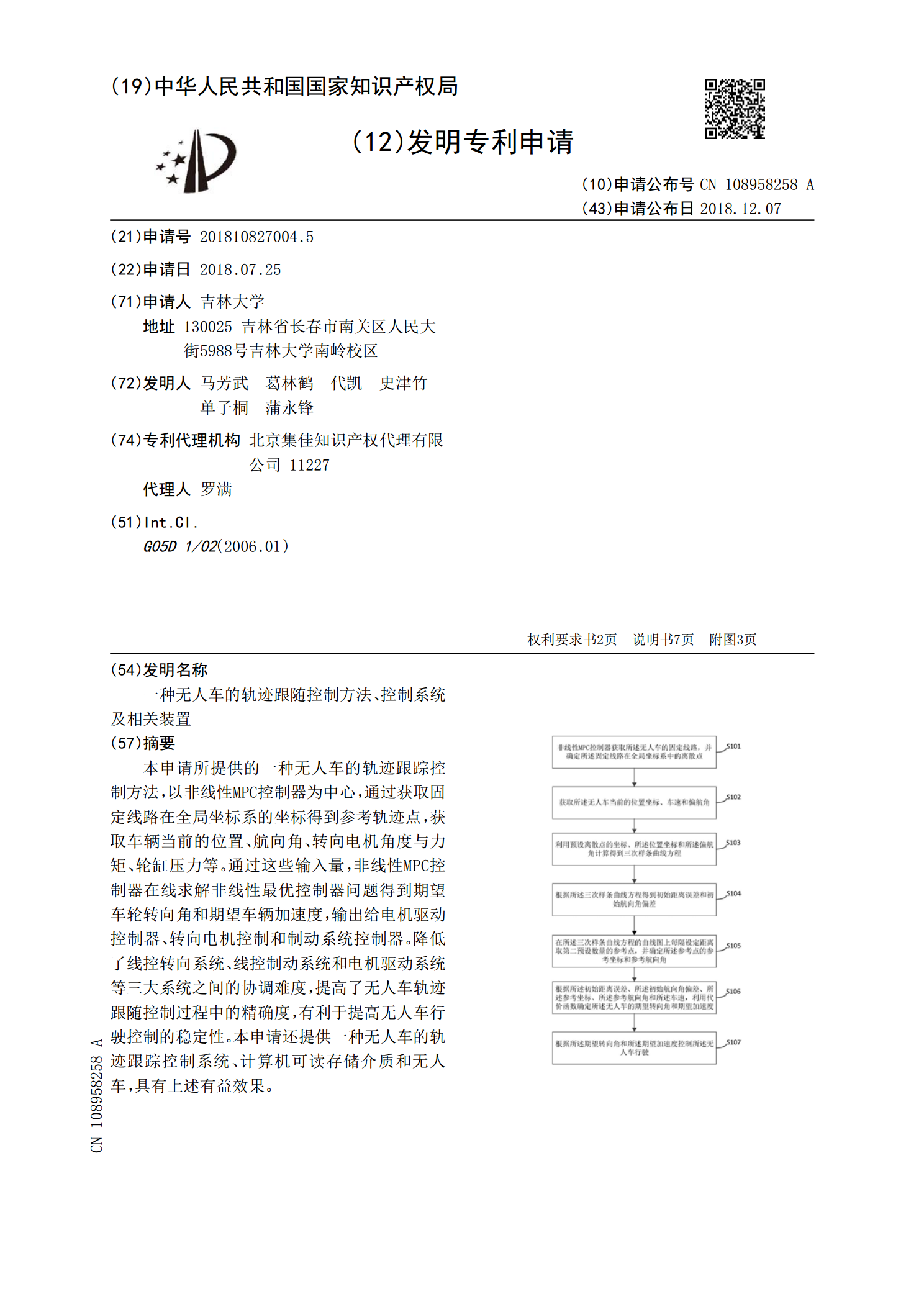
本申请所提供的一种无人车的轨迹跟踪控制方法,以非线性MPC控制器为中心,通过获取固定线路在全局坐标系的坐标得到参考轨迹点,获取车辆当前的位置、航向角、转向电机角度与力矩、轮缸压力等。通过这些输入量,非线性MPC控制器在线求解非线性最优控制器问题得到期望车轮转向角和期望车辆加速度,输出给电机驱动控制器、转向电机控制和制动系统控制器。降低了线控转向系统、线控制动系统和电机驱动系统等三大系统之间的协调难度,提高了无人车轨迹跟随控制过程中的精确度,有利于提高无人车行驶控制的稳定性。本申请还提供一种无人车的轨迹跟踪
一种无人车辆的横纵向协调控制轨迹跟随控制方法.pdf
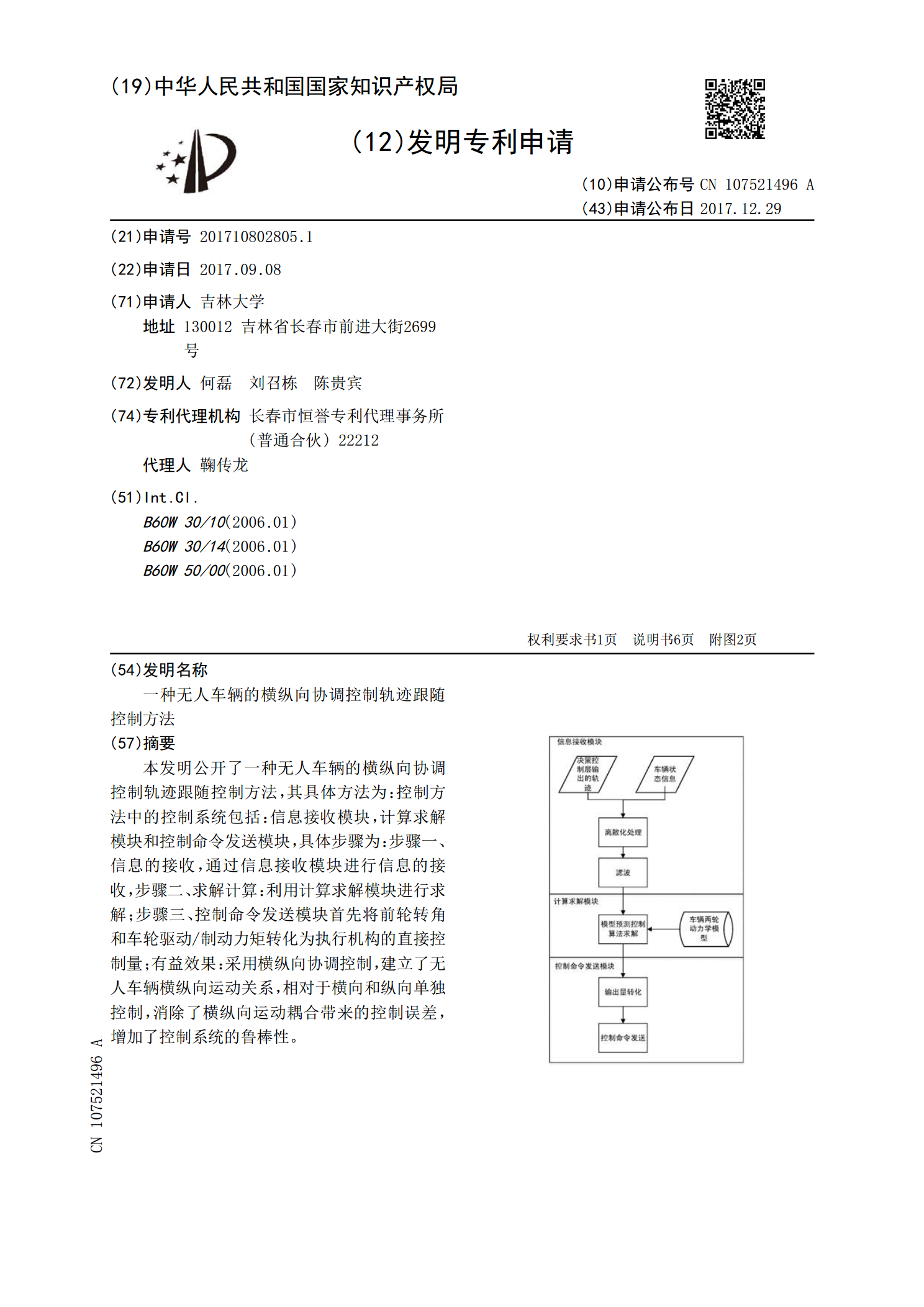
本发明公开了一种无人车辆的横纵向协调控制轨迹跟随控制方法,其具体方法为:控制方法中的控制系统包括:信息接收模块,计算求解模块和控制命令发送模块,具体步骤为:步骤一、信息的接收,通过信息接收模块进行信息的接收,步骤二、求解计算:利用计算求解模块进行求解;步骤三、控制命令发送模块首先将前轮转角和车轮驱动/制动力矩转化为执行机构的直接控制量;有益效果:采用横纵向协调控制,建立了无人车辆横纵向运动关系,相对于横向和纵向单独控制,消除了横纵向运动耦合带来的控制误差,增加了控制系统的鲁棒性。
一种无人车备用控制系统、方法及无人车.pdf
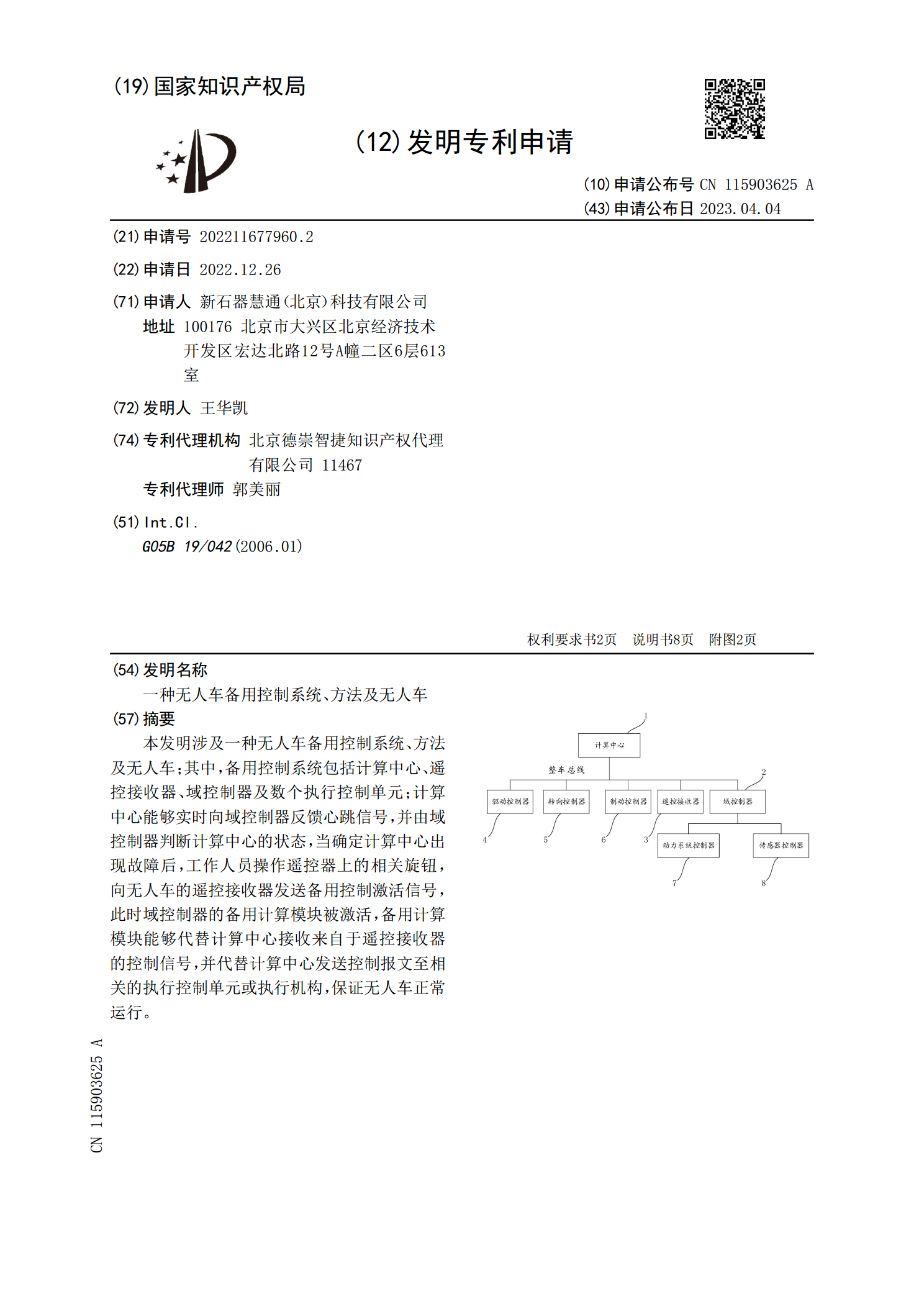
本发明涉及一种无人车备用控制系统、方法及无人车;其中,备用控制系统包括计算中心、遥控接收器、域控制器及数个执行控制单元;计算中心能够实时向域控制器反馈心跳信号,并由域控制器判断计算中心的状态,当确定计算中心出现故障后,工作人员操作遥控器上的相关旋钮,向无人车的遥控接收器发送备用控制激活信号,此时域控制器的备用计算模块被激活,备用计算模块能够代替计算中心接收来自于遥控接收器的控制信号,并代替计算中心发送控制报文至相关的执行控制单元或执行机构,保证无人车正常运行。
港口集装箱搬运无人车轨迹控制方法及装置.pdf
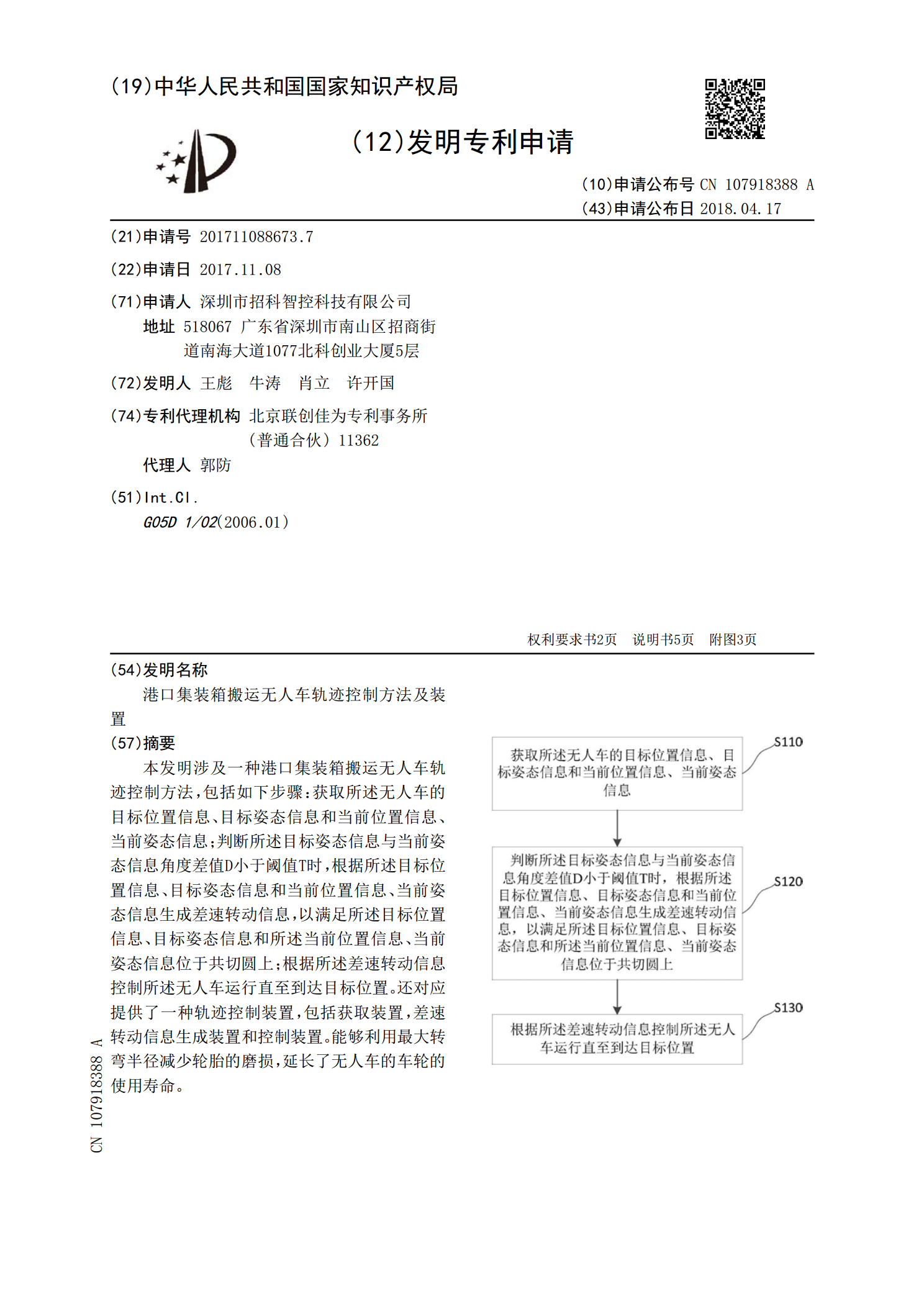
本发明涉及一种港口集装箱搬运无人车轨迹控制方法,包括如下步骤:获取所述无人车的目标位置信息、目标姿态信息和当前位置信息、当前姿态信息;判断所述目标姿态信息与当前姿态信息角度差值D小于阈值T时,根据所述目标位置信息、目标姿态信息和当前位置信息、当前姿态信息生成差速转动信息,以满足所述目标位置信息、目标姿态信息和所述当前位置信息、当前姿态信息位于共切圆上;根据所述差速转动信息控制所述无人车运行直至到达目标位置。还对应提供了一种轨迹控制装置,包括获取装置,差速转动信息生成装置和控制装置。能够利用最大转弯半径减少