
一种可在线连续控制惯容量的半主动惯容.pdf

白真****ng

1/9
2/9
3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
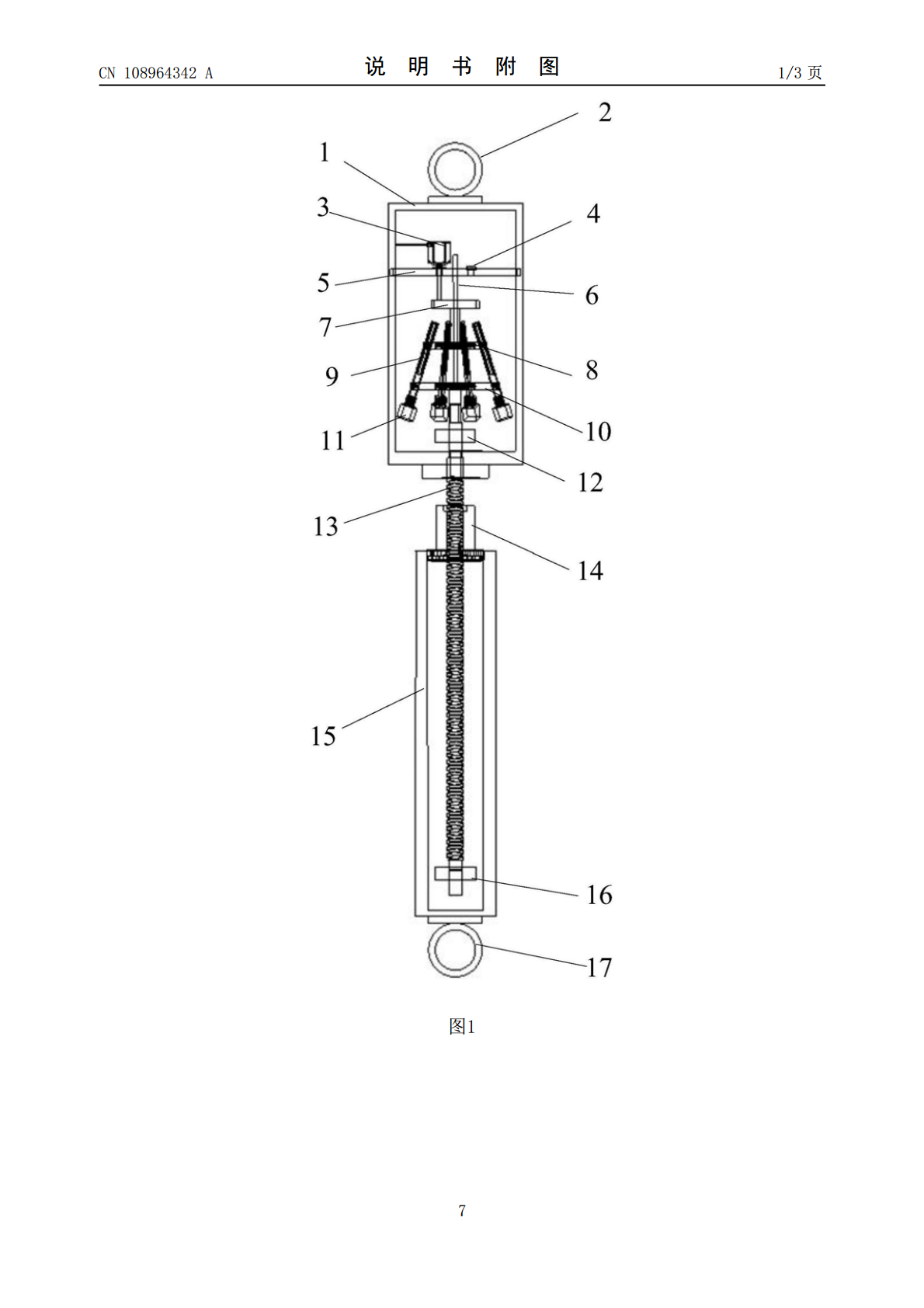
一种可在线连续控制惯容量的半主动惯容.pdf
本发明提供了一种可在线连续控制惯容量的半主动惯容,包括上下同轴连接的旋转飞轮和滚珠丝杠;旋转飞轮包括伺服电机、竖直的滑杆、套装在滑杆上且受伺服电机向下推动的受力推杆、连接受力推杆的底端且通过轴承安装在滑杆上的各个滑动臂、通过轴承安装在滑杆底端的各个固定臂以及与滑动臂、固定臂对应的杠杆调节臂,每个滑动臂的末端沿杠杆调节臂上的滑槽滑动,每个固定臂的末端与刚刚调节臂可转动连接,杠杆调节臂的底部固定有质量块,滚珠丝杠的顶端刚性连接固定臂的轴承座。本发明旋转飞轮采用省力杠杆原理在线改变质量块距转轴的距离,从而改变飞
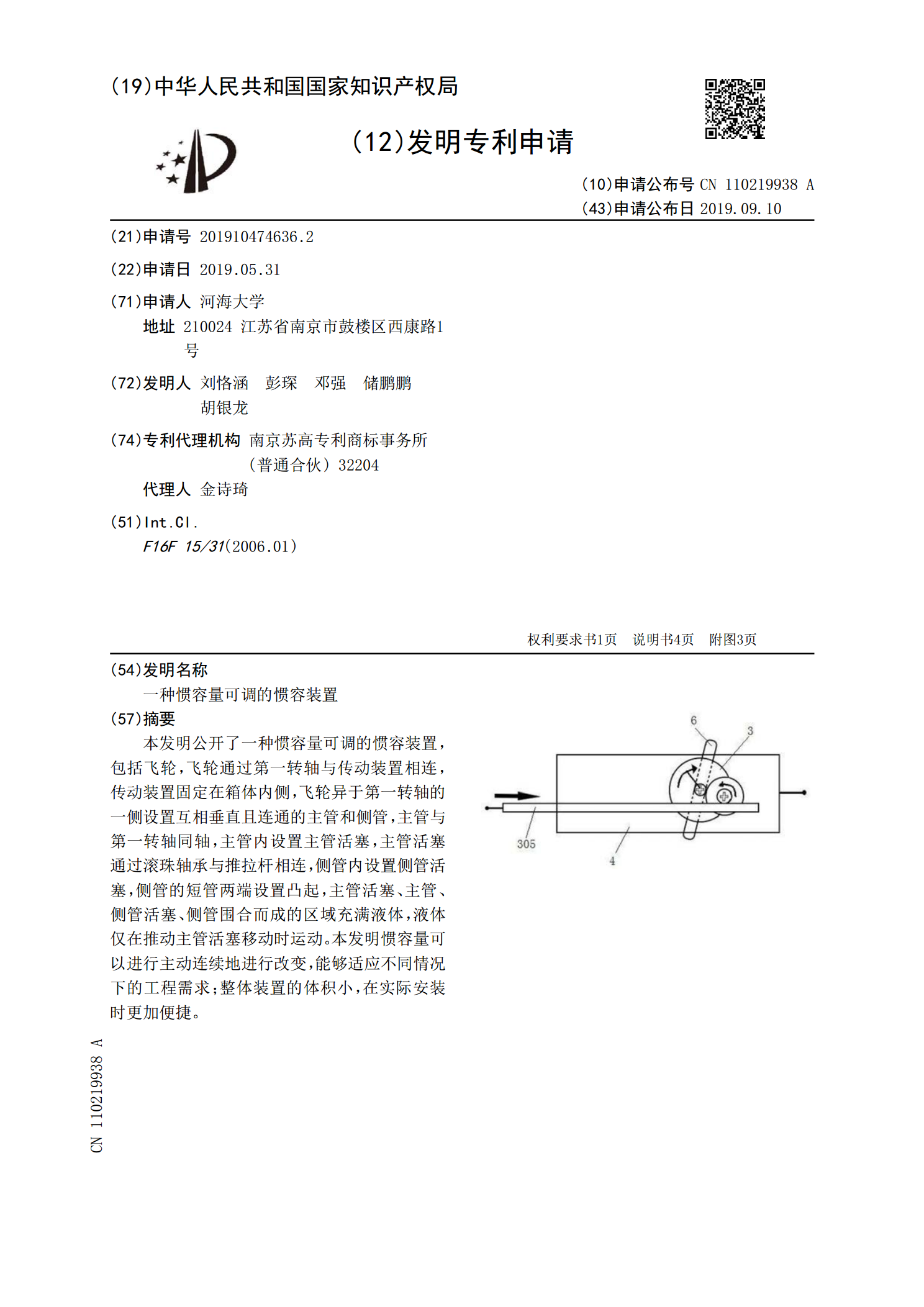
一种惯容量可调的惯容装置.pdf
本发明公开了一种惯容量可调的惯容装置,包括飞轮,飞轮通过第一转轴与传动装置相连,传动装置固定在箱体内侧,飞轮异于第一转轴的一侧设置互相垂直且连通的主管和侧管,主管与第一转轴同轴,主管内设置主管活塞,主管活塞通过滚珠轴承与推拉杆相连,侧管内设置侧管活塞,侧管的短管两端设置凸起,主管活塞、主管、侧管活塞、侧管围合而成的区域充满液体,液体仅在推动主管活塞移动时运动。本发明惯容量可以进行主动连续地进行改变,能够适应不同情况下的工程需求;整体装置的体积小,在实际安装时更加便捷。

“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的综述报告.docx
“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的综述报告随着汽车工业的快速发展,汽车的悬架系统成为了越来越多的研究热点。在传统悬架系统的基础上,半主动悬架系统在实现舒适性和操控性的平衡中具有独特的优势。本文将主要介绍“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的相关内容。半主动悬架技术的理念是采用一系列可调节的元件(如电控液压阀门、电子控制单元等)来动态调整悬架系统的阻尼、弹簧刚度等参数,以使车辆更加适应不同路面的变化,从而提高车辆行驶的稳定性、舒适性和操控性。惯容-弹簧-阻尼半主动悬架系统是半主动悬架系统的一
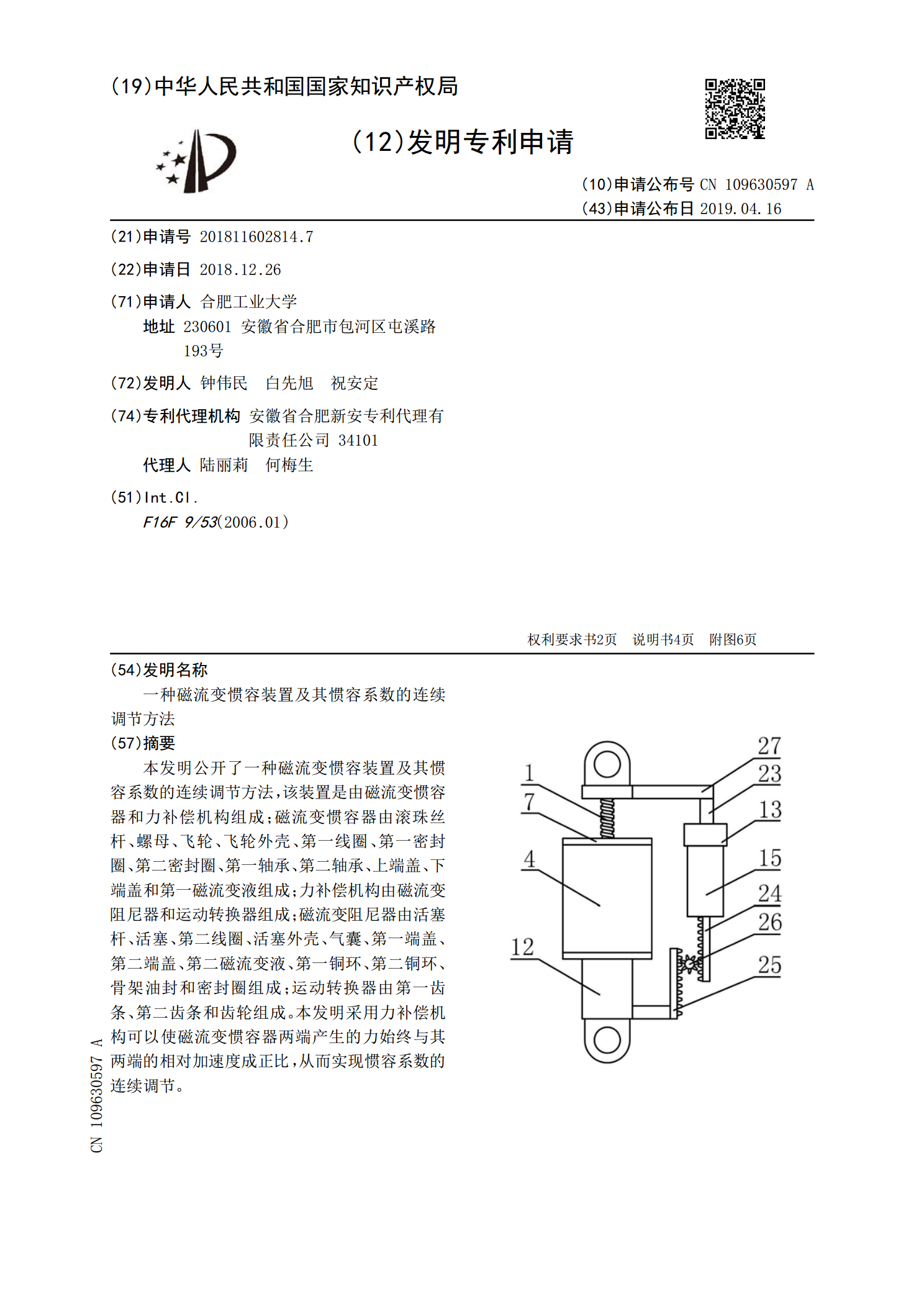
一种磁流变惯容装置及其惯容系数的连续调节方法.pdf
本发明公开了一种磁流变惯容装置及其惯容系数的连续调节方法,该装置是由磁流变惯容器和力补偿机构组成;磁流变惯容器由滚珠丝杆、螺母、飞轮、飞轮外壳、第一线圈、第一密封圈、第二密封圈、第一轴承、第二轴承、上端盖、下端盖和第一磁流变液组成;力补偿机构由磁流变阻尼器和运动转换器组成;磁流变阻尼器由活塞杆、活塞、第二线圈、活塞外壳、气囊、第一端盖、第二端盖、第二磁流变液、第一铜环、第二铜环、骨架油封和密封圈组成;运动转换器由第一齿条、第二齿条和齿轮组成。本发明采用力补偿机构可以使磁流变惯容器两端产生的力始终与其两端的

一种基于杠杆的滚珠丝杠式半主动惯容装置.pdf
本发明公开了一种基于杠杆的滚珠丝杠式半主动惯容装置,包括:旋转飞轮,其上沿周向均布有多个质量块;质量块能够相对旋转飞轮的径向往复运动,并通过连杆与套环铰接,且可相对套环转动;第一驱动单元用于带动套环上下移动,以带动质量块的移动;导向单元用于对套环的移动进行导向;滚珠丝杠单元,其中丝杠的上端与旋转飞轮相连,丝杠螺母下端与多个力臂可调的杠杆机构相连;均布在丝杠螺母下端的多个杠杆机构,杠杆机构通过与其铰接的支撑杆固定支撑在固定板上,内侧与丝杠螺母铰接,外侧设有力臂调节单元,能够调节相对支撑杆的力臂大小,同时带动