
“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的综述报告.docx
“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的综述报告随着汽车工业的快速发展,汽车的悬架系统成为了越来越多的研究热点。在传统悬架系统的基础上,半主动悬架系统在实现舒适性和操控性的平衡中具有独特的优势。本文将主要介绍“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的相关内容。半主动悬架技术的理念是采用一系列可调节的元件(如电控液压阀门、电子控制单元等)来动态调整悬架系统的阻尼、弹簧刚度等参数,以使车辆更加适应不同路面的变化,从而提高车辆行驶的稳定性、舒适性和操控性。惯容-弹簧-阻尼半主动悬架系统是半主动悬架系统的一

“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的任务书.docx
“惯容-弹簧-阻尼”半主动悬架鲁棒控制研究的任务书任务书一、任务背景随着社会的不断发展,车辆行驶的安全性、稳定性、舒适性得到越来越多的重视。车辆悬架系统的重要性也日益凸显。目前,半主动悬架系统在汽车悬架系统中得到了广泛应用。半主动悬架是指智能悬架系统,通过调节车辆悬架的弹簧、阻尼等参数,来适应不同路面情况下的悬架系统工作状态,以达到车辆行驶的安全性、稳定性、舒适性和燃油经济性的最优化目标。然而,在实际使用中,半主动悬架系统的鲁棒性存在一定的问题,如路面扰动、零点漂移等。因此,对于半主动悬架系统的鲁棒控制研
一种弹簧阻尼惯容一体式悬架.pdf
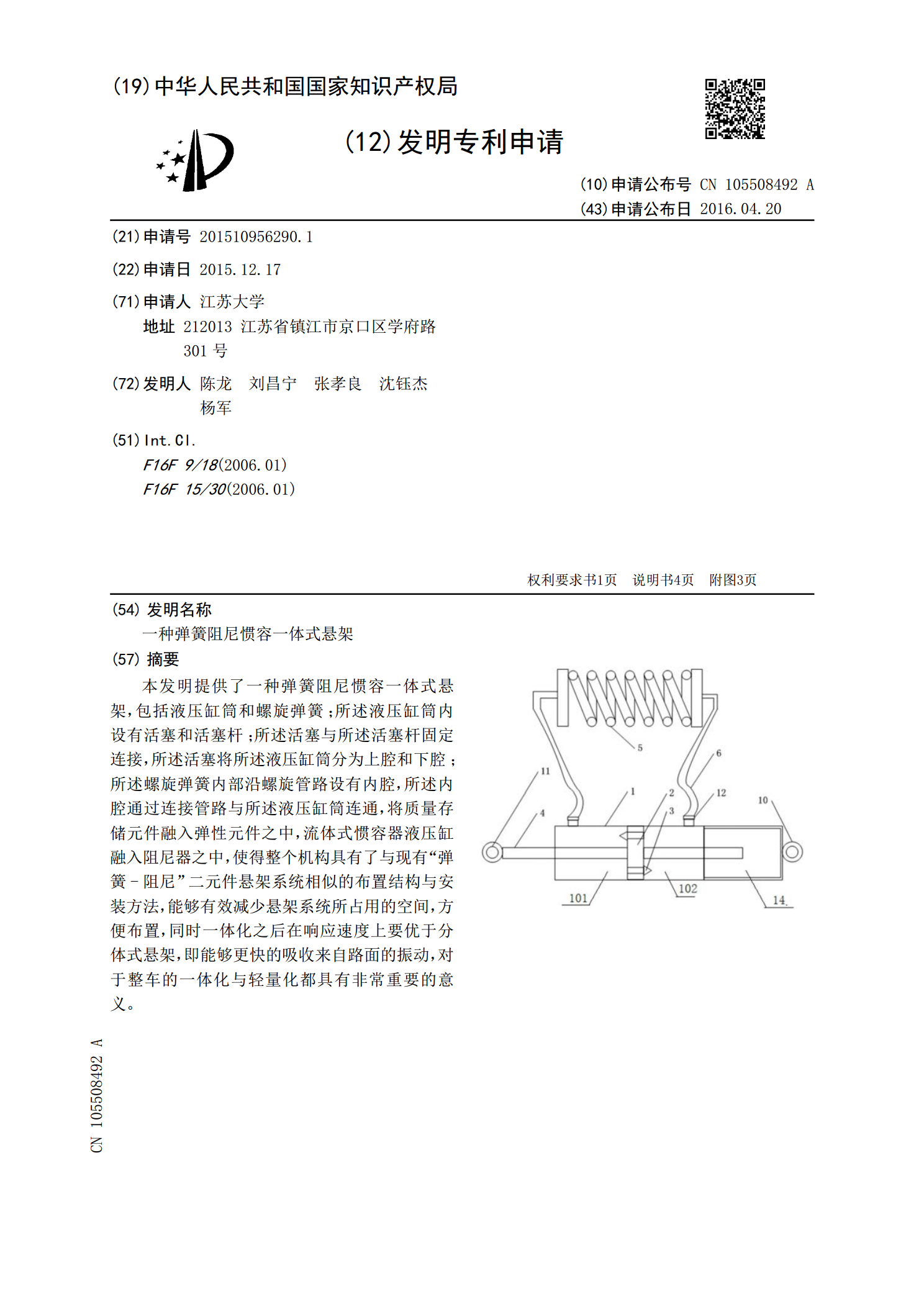
本发明提供了一种弹簧阻尼惯容一体式悬架,包括液压缸筒和螺旋弹簧;所述液压缸筒内设有活塞和活塞杆;所述活塞与所述活塞杆固定连接,所述活塞将所述液压缸筒分为上腔和下腔;所述螺旋弹簧内部沿螺旋管路设有内腔,所述内腔通过连接管路与所述液压缸筒连通,将质量存储元件融入弹性元件之中,流体式惯容器液压缸融入阻尼器之中,使得整个机构具有了与现有“弹簧-阻尼”二元件悬架系统相似的布置结构与安装方法,能够有效减少悬架系统所占用的空间,方便布置,同时一体化之后在响应速度上要优于分体式悬架,即能够更快的吸收来自路面的振动,对于整

基于惯容-弹簧-阻尼的结构减振研究.docx
基于惯容-弹簧-阻尼的结构减振研究基于惯容-弹簧-阻尼的结构减振研究摘要随着现代建筑高度的逐步提高和建筑物振动问题的日益凸显,结构减振技术已成为难点研究之一。惯容-弹簧-阻尼系统是一种常见的结构减振方案。本文首先介绍惯容-弹簧-阻尼系统的结构原理,然后分析了其作用机理及其在实际工程中的应用情况,并展望了未来的发展方向。关键词:惯容-弹簧-阻尼,结构减振,阻尼比,振动特性I.简介现代建筑由于高度较高、风压和地震力较大,在使用过程中容易出现明显的振动,往往需要采用结构减振技术来降低振动对建筑及其使用者所造成的

基于MR阻尼器可变刚度和阻尼半主动悬架控制研究的综述报告.docx
基于MR阻尼器可变刚度和阻尼半主动悬架控制研究的综述报告近年来,随着汽车行业的不断发展和人们对汽车安全性和舒适性要求的提高,半主动悬架系统越来越受到关注。而MR阻尼器可变刚度和阻尼半主动悬架控制是半主动悬架系统中的一种重要类型。MR阻尼器是一种基于磁流变(MR)效应的阻尼器,其阻尼特性可以通过改变电磁场强度来实现。该阻尼器具有响应速度快、实时性好、经济、耐用等特点,被广泛应用于半主动悬架系统中。在MR阻尼器基础上,结合可变刚度技术,形成了MR阻尼器可变刚度和阻尼半主动悬架控制。MR阻尼器可变刚度和阻尼半主