
线缆巡检机器人及使用该线缆巡检机器人的线缆巡检方法.pdf

宜然****找我

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
线缆巡检机器人及使用该线缆巡检机器人的线缆巡检方法.pdf
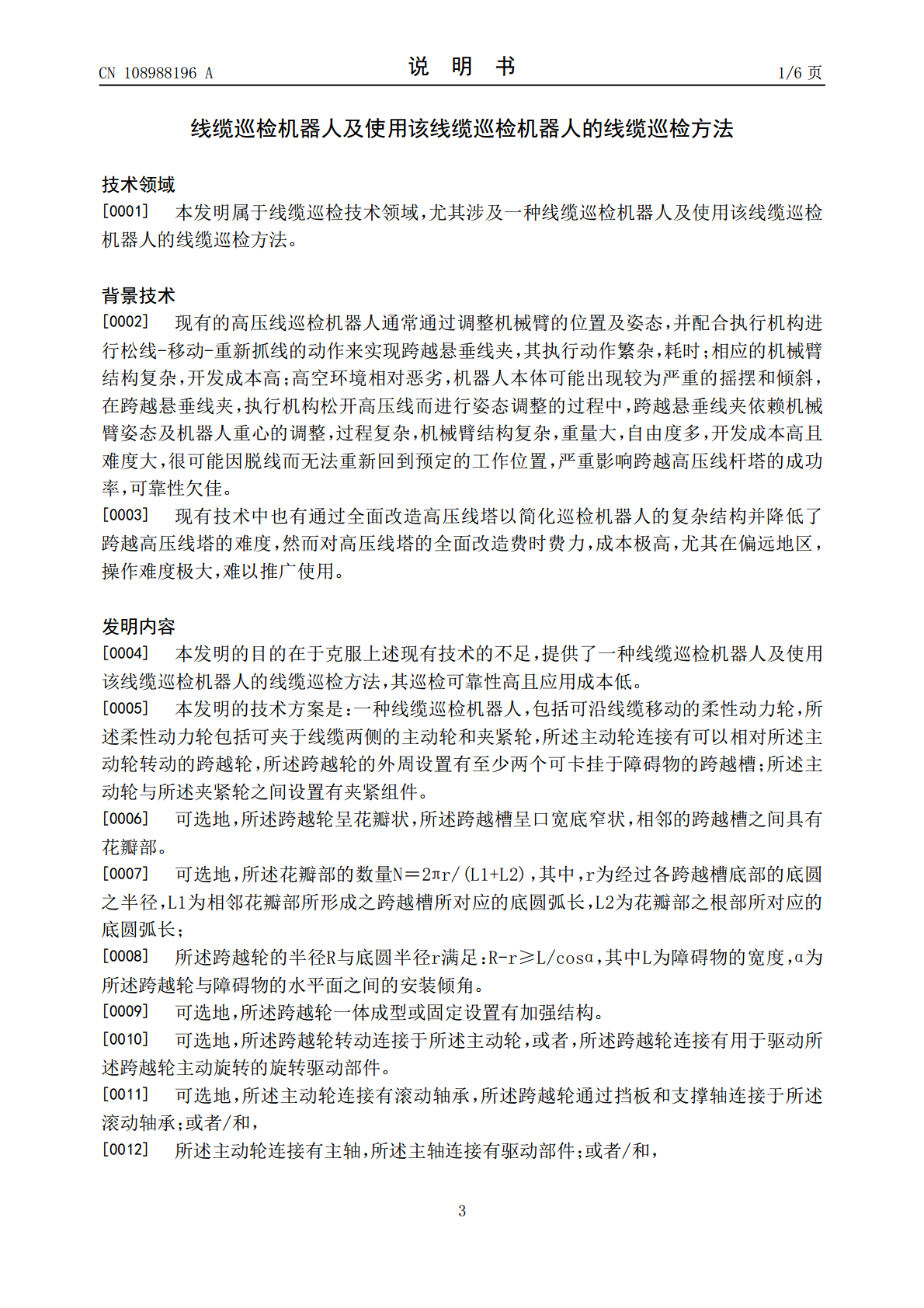
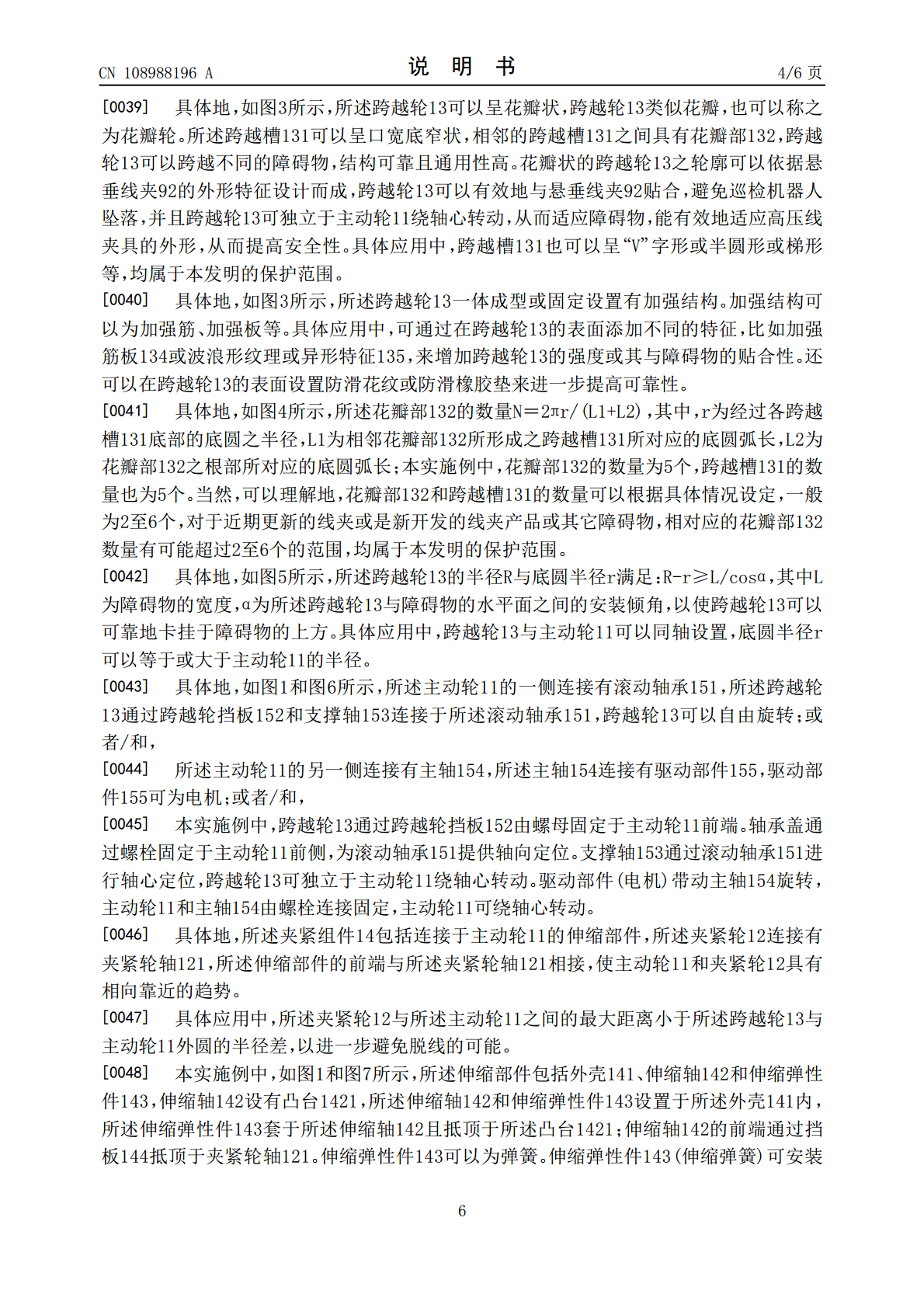
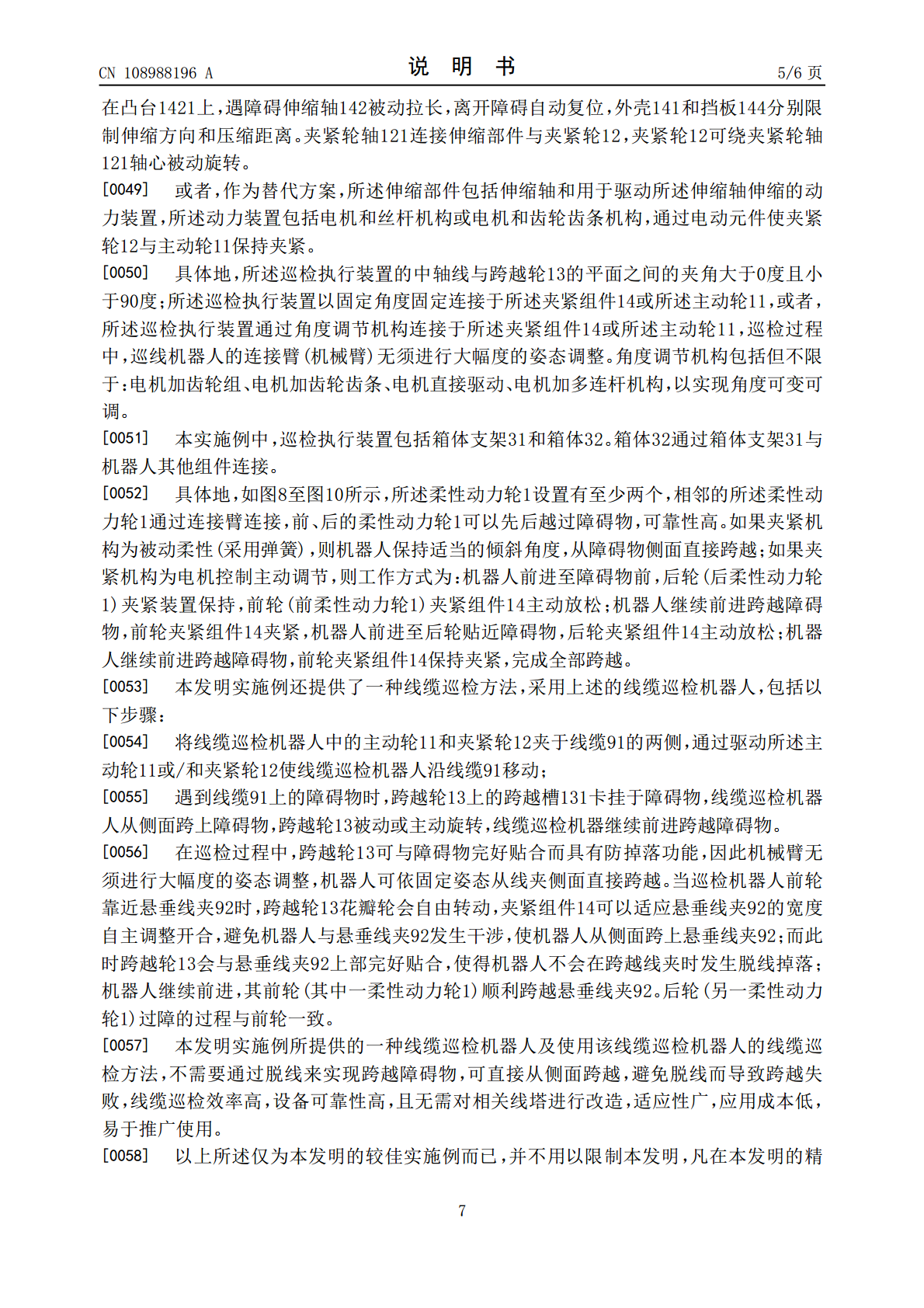
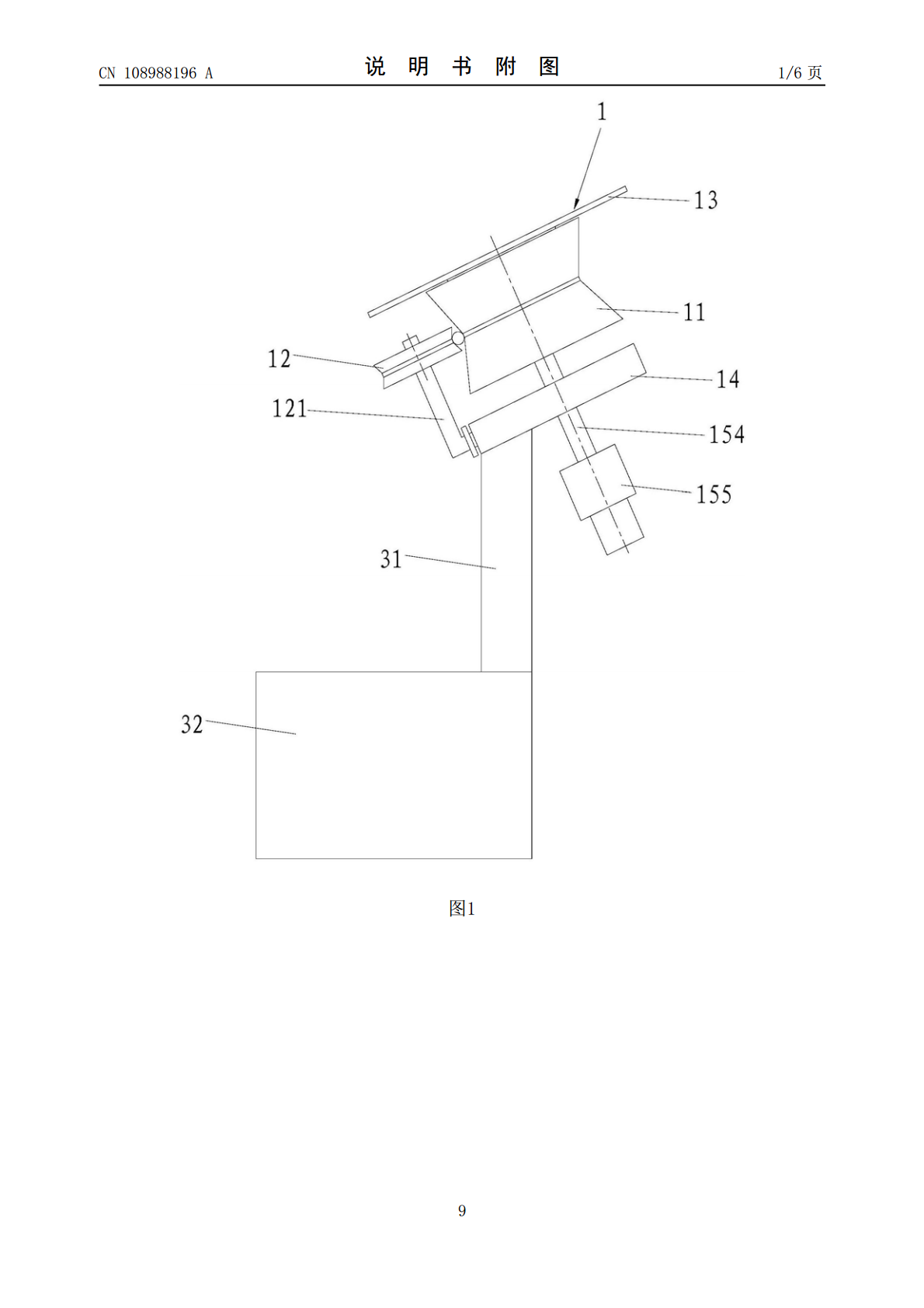
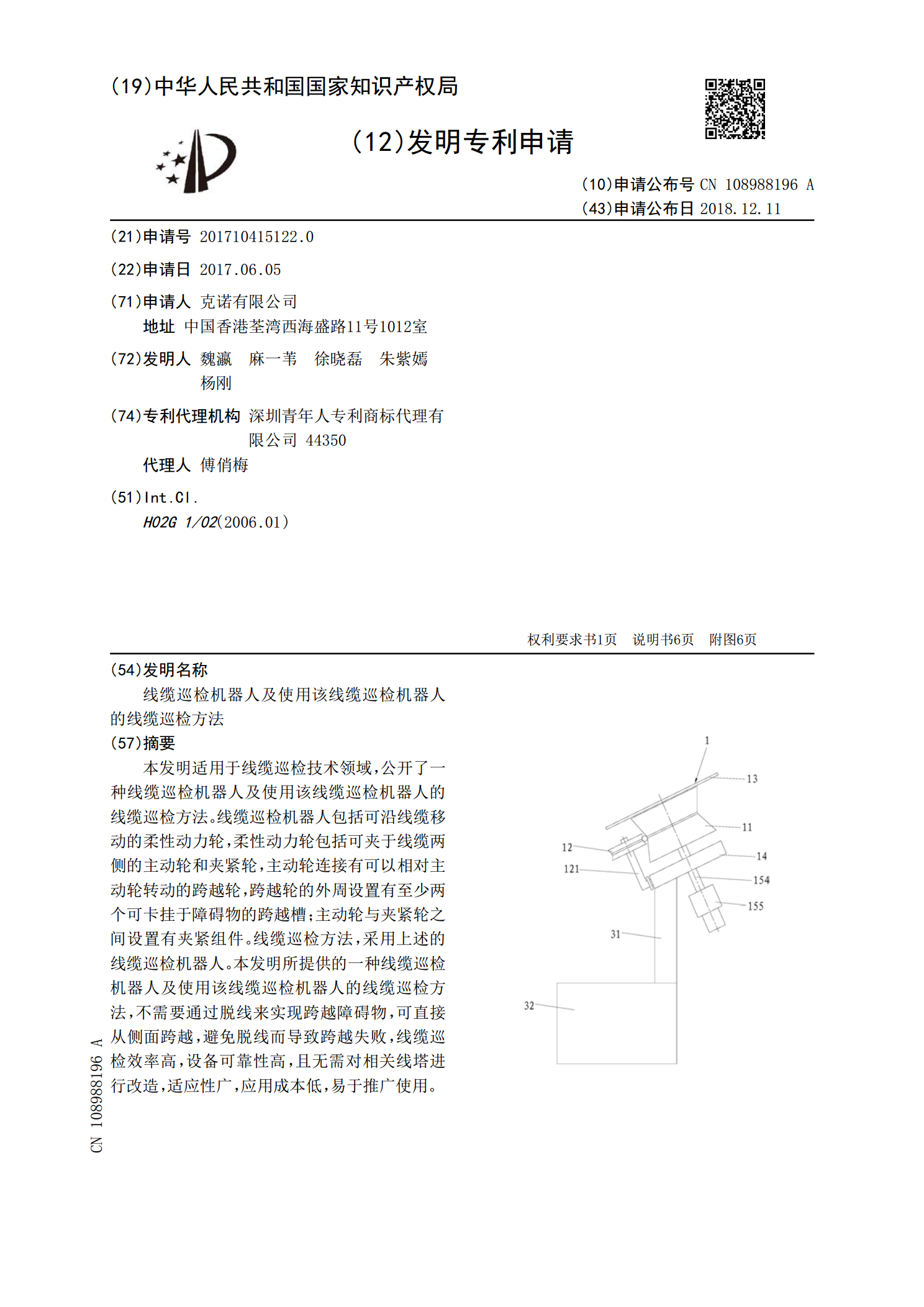
本发明适用于线缆巡检技术领域,公开了一种线缆巡检机器人及使用该线缆巡检机器人的线缆巡检方法。线缆巡检机器人包括可沿线缆移动的柔性动力轮,柔性动力轮包括可夹于线缆两侧的主动轮和夹紧轮,主动轮连接有可以相对主动轮转动的跨越轮,跨越轮的外周设置有至少两个可卡挂于障碍物的跨越槽;主动轮与夹紧轮之间设置有夹紧组件。线缆巡检方法,采用上述的线缆巡检机器人。本发明所提供的一种线缆巡检机器人及使用该线缆巡检机器人的线缆巡检方法,不需要通过脱线来实现跨越障碍物,可直接从侧面跨越,避免脱线而导致跨越失败,线缆巡检效率高,设备
线缆巡检机器人使用的复合夹紧装置和线缆巡检机器人.pdf
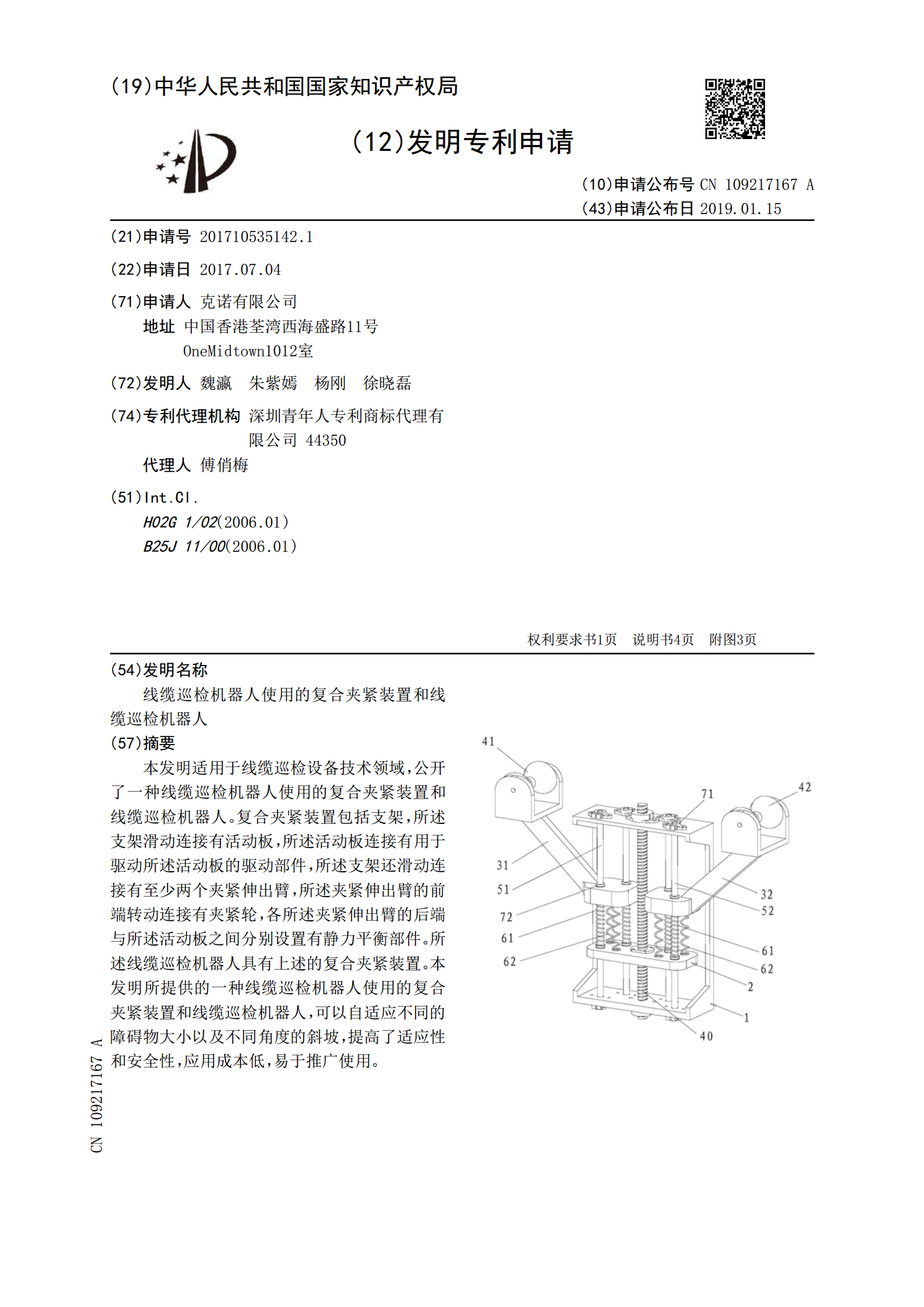
本发明适用于线缆巡检设备技术领域,公开了一种线缆巡检机器人使用的复合夹紧装置和线缆巡检机器人。复合夹紧装置包括支架,所述支架滑动连接有活动板,所述活动板连接有用于驱动所述活动板的驱动部件,所述支架还滑动连接有至少两个夹紧伸出臂,所述夹紧伸出臂的前端转动连接有夹紧轮,各所述夹紧伸出臂的后端与所述活动板之间分别设置有静力平衡部件。所述线缆巡检机器人具有上述的复合夹紧装置。本发明所提供的一种线缆巡检机器人使用的复合夹紧装置和线缆巡检机器人,可以自适应不同的障碍物大小以及不同角度的斜坡,提高了适应性和安全性,应用
一种高空线缆巡检机器人.pdf
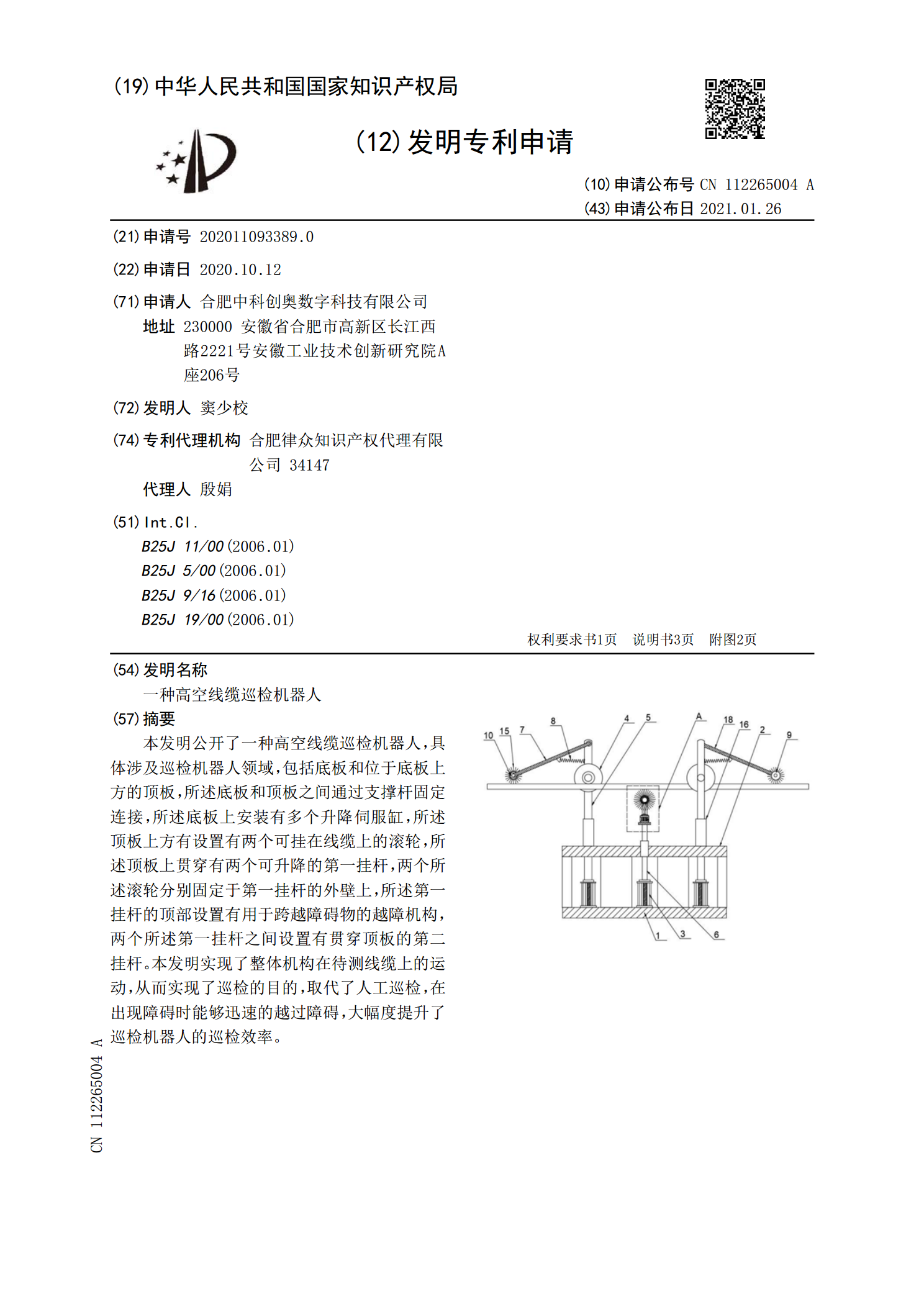
本发明公开了一种高空线缆巡检机器人,具体涉及巡检机器人领域,包括底板和位于底板上方的顶板,所述底板和顶板之间通过支撑杆固定连接,所述底板上安装有多个升降伺服缸,所述顶板上方有设置有两个可挂在线缆上的滚轮,所述顶板上贯穿有两个可升降的第一挂杆,两个所述滚轮分别固定于第一挂杆的外壁上,所述第一挂杆的顶部设置有用于跨越障碍物的越障机构,两个所述第一挂杆之间设置有贯穿顶板的第二挂杆。本发明实现了整体机构在待测线缆上的运动,从而实现了巡检的目的,取代了人工巡检,在出现障碍时能够迅速的越过障碍,大幅度提升了巡检机器人
高压线缆巡检机器人用行走夹持机构.pdf
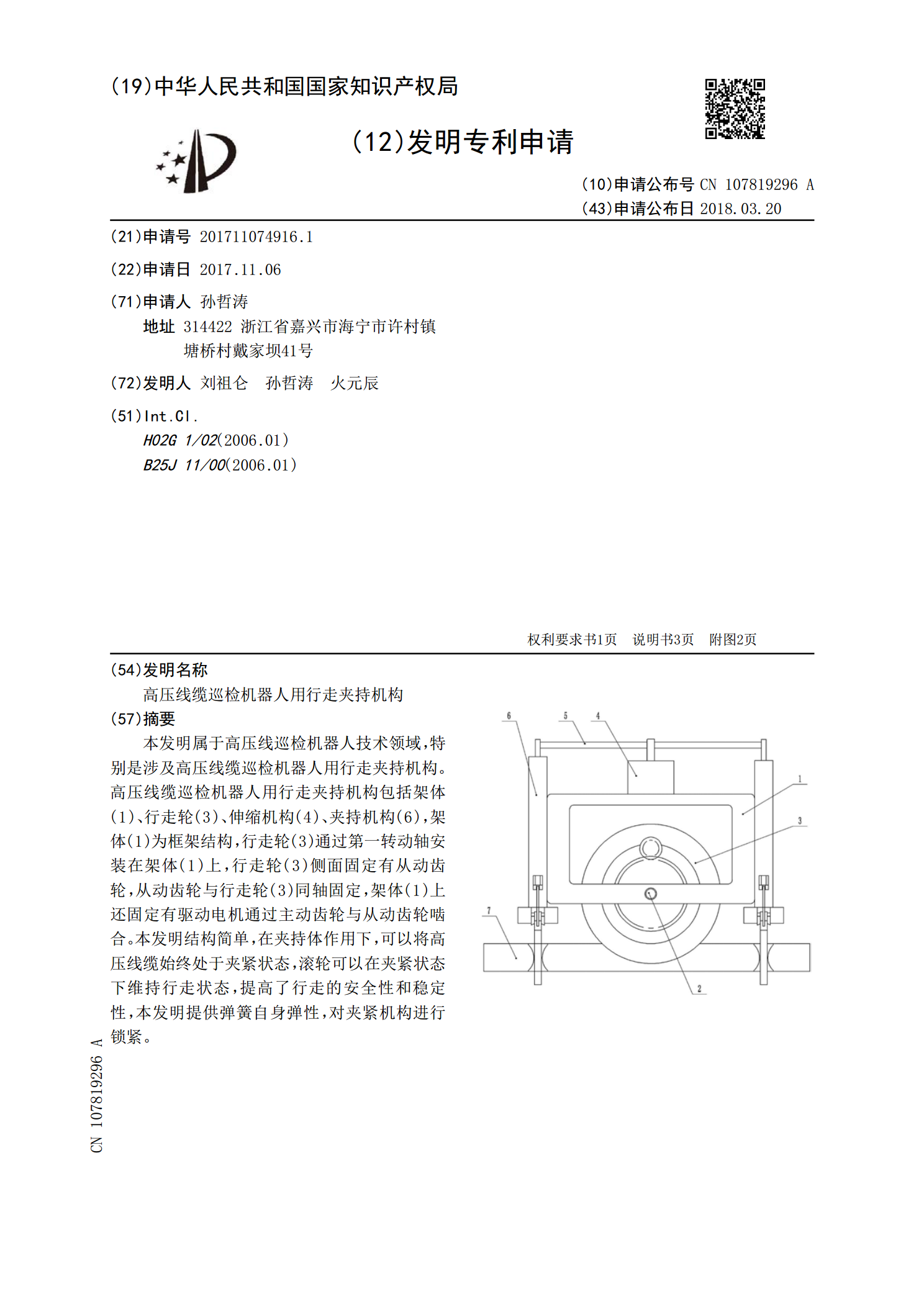
本发明属于高压线巡检机器人技术领域,特别是涉及高压线缆巡检机器人用行走夹持机构。高压线缆巡检机器人用行走夹持机构包括架体(1)、行走轮(3)、伸缩机构(4)、夹持机构(6),架体(1)为框架结构,行走轮(3)通过第一转动轴安装在架体(1)上,行走轮(3)侧面固定有从动齿轮,从动齿轮与行走轮(3)同轴固定,架体(1)上还固定有驱动电机通过主动齿轮与从动齿轮啮合。本发明结构简单,在夹持体作用下,可以将高压线缆始终处于夹紧状态,滚轮可以在夹紧状态下维持行走状态,提高了行走的安全性和稳定性,本发明提供弹簧自身弹性

用于高压线缆巡检机器人的行走夹持机构.pdf
本发明属于高压线巡检机器人技术领域,特别是涉及高压线缆巡检机器人用行走夹持机构。其包括架体、行走轮,行走轮安装在架体上,架体上固定有第一电机与行走轮连接;架体前后部均固定有一对固定轴,每对固定轴上分别设置第一支杆和第二支杆,第一支杆固定有第一夹持体,第二支杆固定有第二夹持体,第一夹持体和第二夹持体相向设置,第一支杆与第一传动杆铰连接,第二支杆与第二传动杆铰连接,第一传动杆与第二传动杆分别与转杆的两端铰连接,转杆转动设置于架体上,转杆与蜗杆的两端固定,蜗轮和蜗杆相啮合,架体还固定有与蜗轮连接的第二电机。本发