
基于Kinect的自主定位机器人.pdf

努力****南绿

1/7
2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于Kinect的自主定位机器人.pdf
本发明公开了基于Kinect的自主定位机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;控制箱体的正上方设置有支撑板,支撑板的中心与控制箱体的上表面之间通过转轴相连,Kinect设备和网络摄像头固定在支撑板的上表面,转轴的下端与控制箱体内部的驱动电机相连,驱动电机能够驱动转轴自转,带动支撑板旋转,该自主定位机器人克服现有技术中的机器人利用GPS定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,且现有

基于视觉的自主定位机器人.pdf
本发明公开了基于视觉的自主定位机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,控制系统设在控制箱体中,该自主定位机器人克服现有技术中的机器人使用GPS定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用的问题。

基于Kinect的温室喷雾机器人视觉导航定位系统的研究.docx
基于Kinect的温室喷雾机器人视觉导航定位系统的研究摘要:本文提出了一种基于Kinect的温室喷雾机器人视觉导航定位系统。该系统采用了Kinect深度相机作为视觉传感器,以红外激光测距为基础,通过对地面上的标记物的识别和映射,实现温室中机器人的导航和定位。根据实验结果,该系统能够实现较高的精度和准确性,可广泛应用于建筑物内部的导航和定位系统。关键词:Kinect;深度相机;红外激光测距;标记物;导航;定位引言:随着科技的不断进步和应用的不断扩展,自主驾驶机器人、无人机等无人系统的应用越来越广泛。在室内环
基于Kinect的木制机器人.pdf
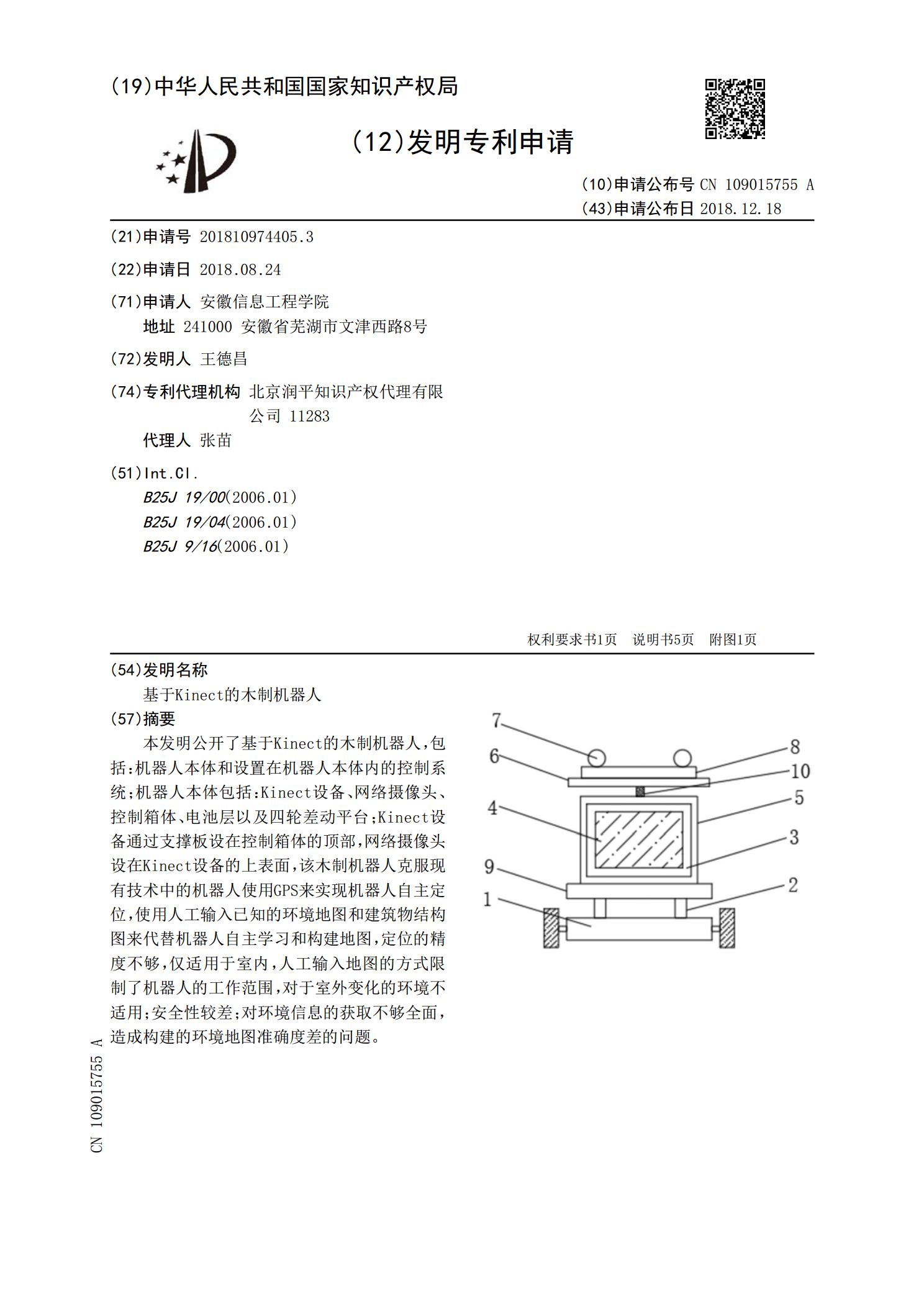
本发明公开了基于Kinect的木制机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,该木制机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用;安全性较差;对环境

基于直线特征的机器人自主定位方法.docx
基于直线特征的机器人自主定位方法基于直线特征的机器人自主定位方法摘要:机器人的自主定位是指机器人在未知环境下,通过利用传感器获取的环境信息,推测自身的位置和姿态。直线特征是环境中常见的特征之一,在机器人自主定位中起着重要的作用。本文将讨论基于直线特征的机器人自主定位方法,主要包括直线提取、直线匹配和定位误差校正三个步骤。通过实验验证和对比分析,证明了该方法的有效性和鲁棒性。关键词:机器人自主定位、直线特征、直线提取、直线匹配、定位误差校正1.引言机器人的自主定位是机器人技术中的重要问题之一,它是机器人实现