
工业机器人消隙摆线减速器.pdf

骊英****bb

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
工业机器人消隙摆线减速器.pdf
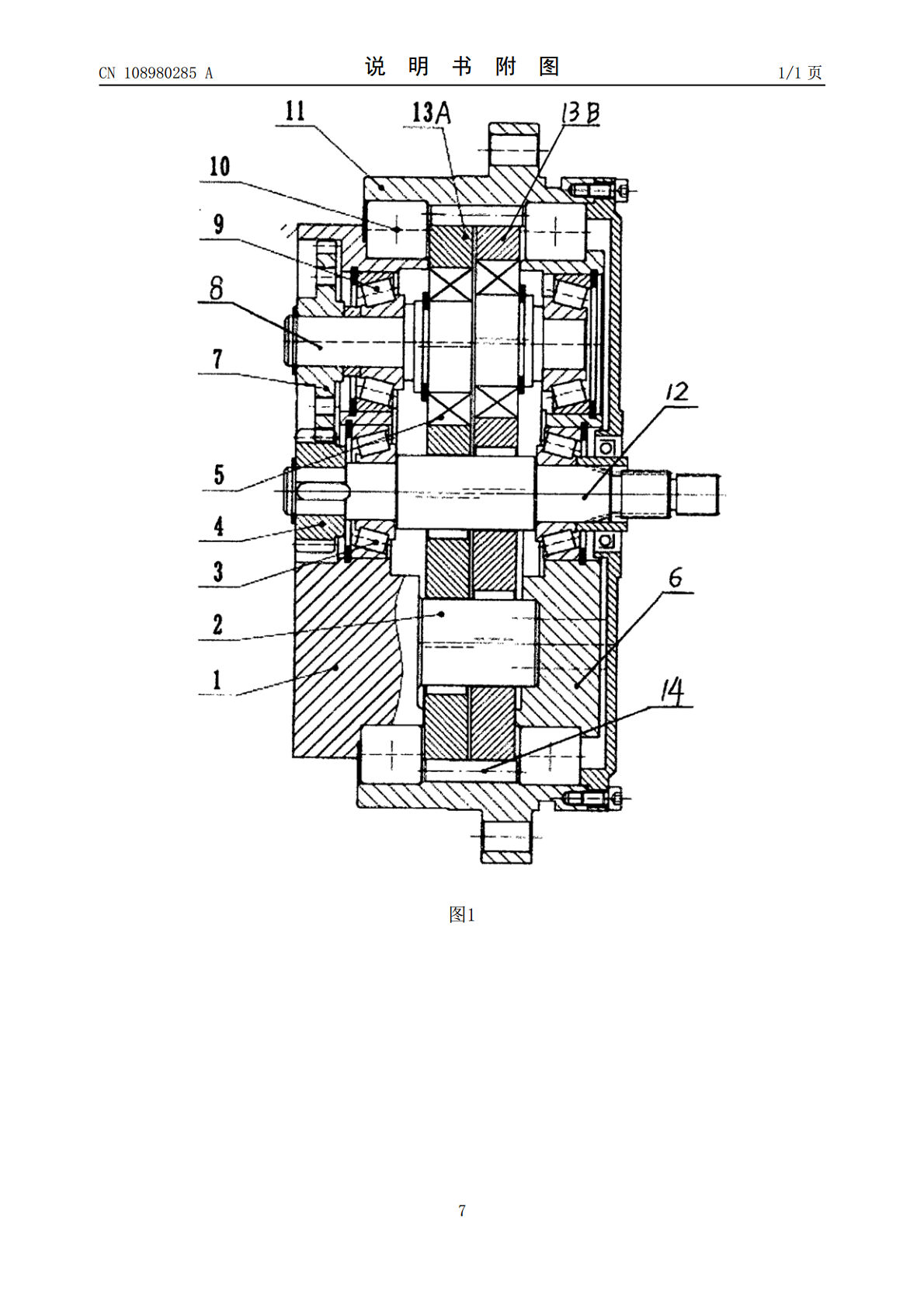
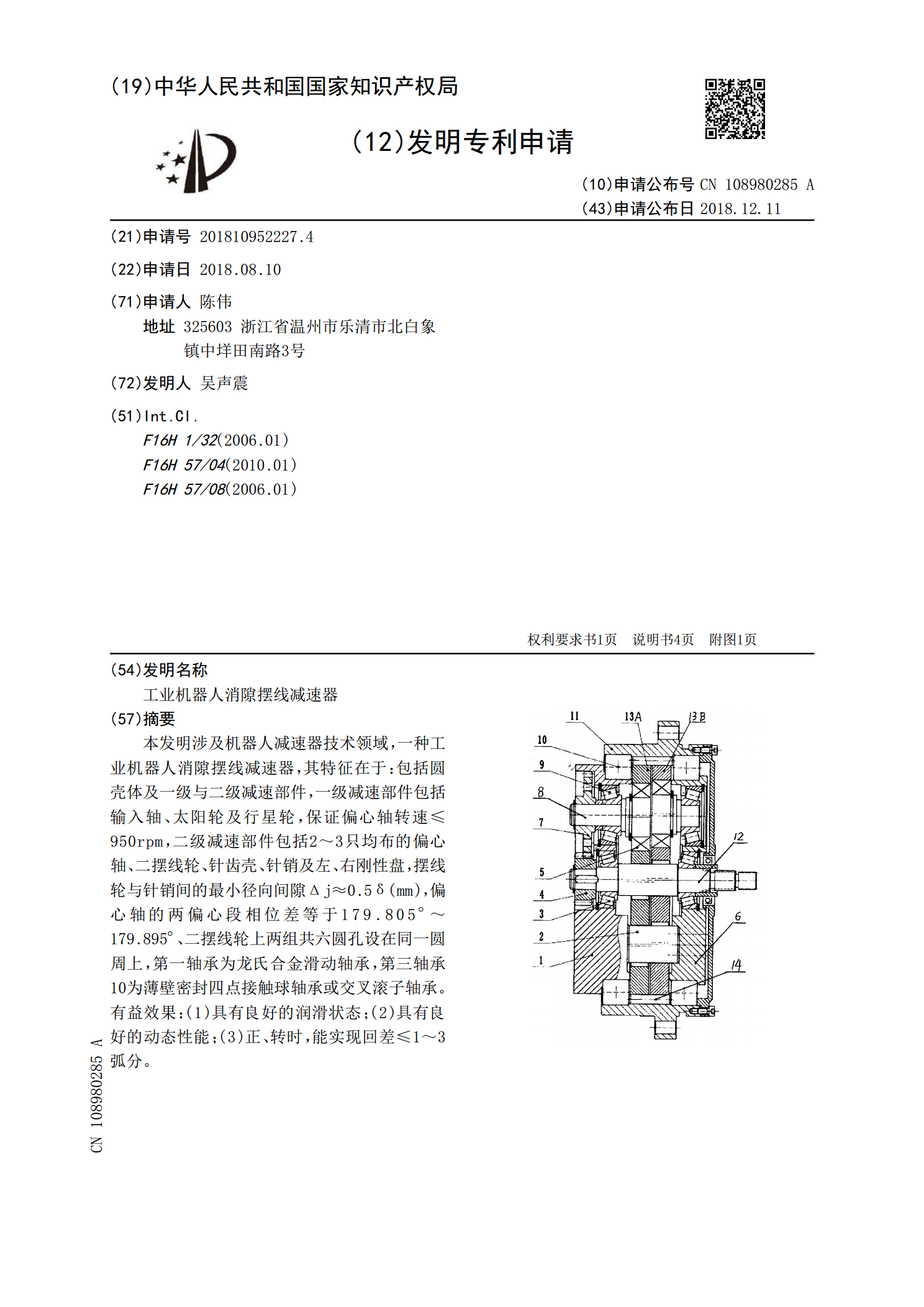
本发明涉及机器人减速器技术领域,一种工业机器人消隙摆线减速器,其特征在于:包括圆壳体及一级与二级减速部件,一级减速部件包括输入轴、太阳轮及行星轮,保证偏心轴转速≤950rpm,二级减速部件包括2~3只均布的偏心轴、二摆线轮、针齿壳、针销及左、右刚性盘,摆线轮与针销间的最小径向间隙Δj≈0.5δ(mm),偏心轴的两偏心段相位差等于179.805°~179.895°、二摆线轮上两组共六圆孔设在同一圆周上,第一轴承为龙氏合金滑动轴承,第三轴承10为薄壁密封四点接触球轴承或交叉滚子轴承。有益效果:(1)具有良好的
工业机器人消隙摆线中空减速器.pdf
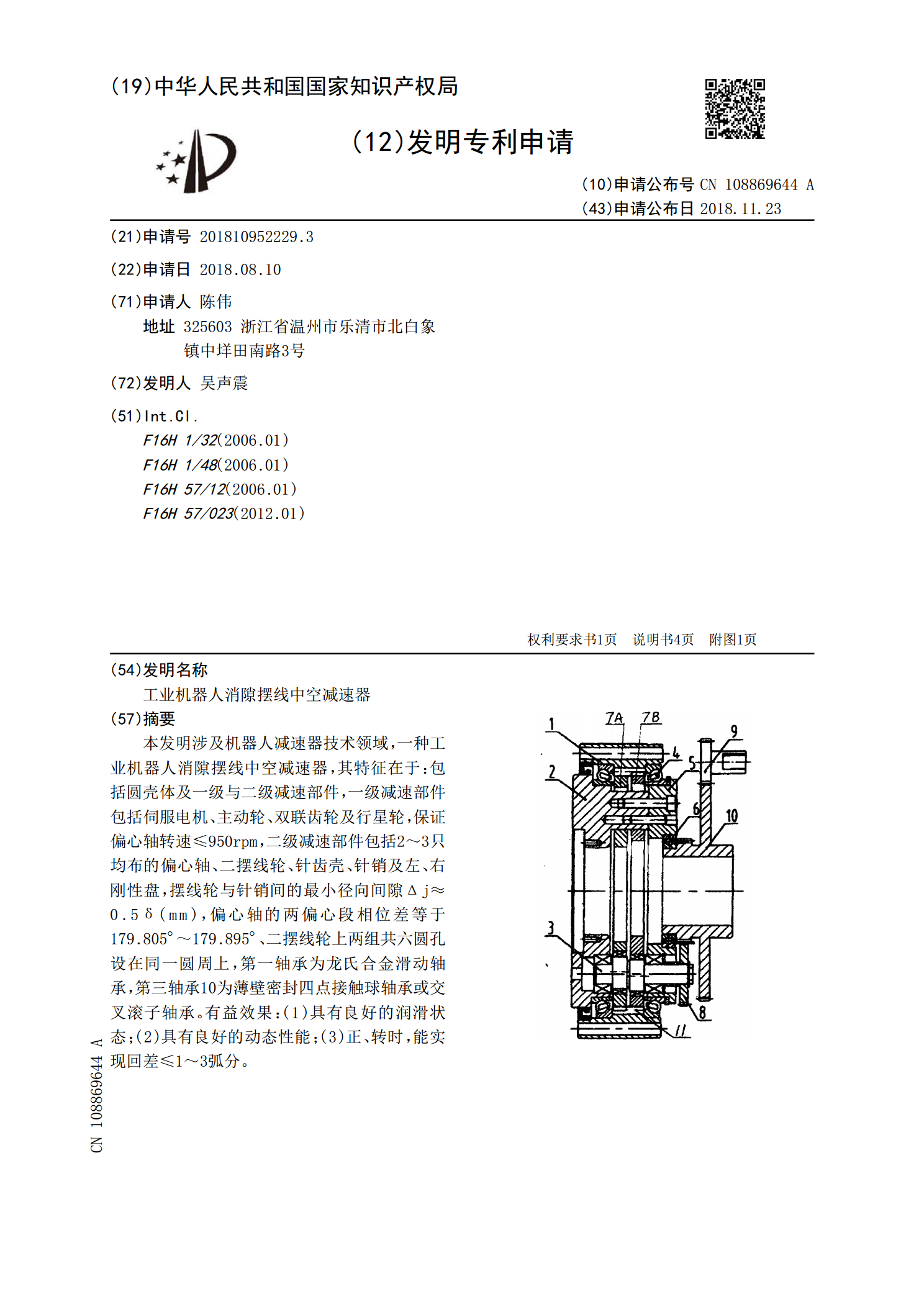
本发明涉及机器人减速器技术领域,一种工业机器人消隙摆线中空减速器,其特征在于:包括圆壳体及一级与二级减速部件,一级减速部件包括伺服电机、主动轮、双联齿轮及行星轮,保证偏心轴转速≤950rpm,二级减速部件包括2~3只均布的偏心轴、二摆线轮、针齿壳、针销及左、右刚性盘,摆线轮与针销间的最小径向间隙Δj≈0.5δ(mm),偏心轴的两偏心段相位差等于179.805°~179.895°、二摆线轮上两组共六圆孔设在同一圆周上,第一轴承为龙氏合金滑动轴承,第三轴承10为薄壁密封四点接触球轴承或交叉滚子轴承。有益效果:
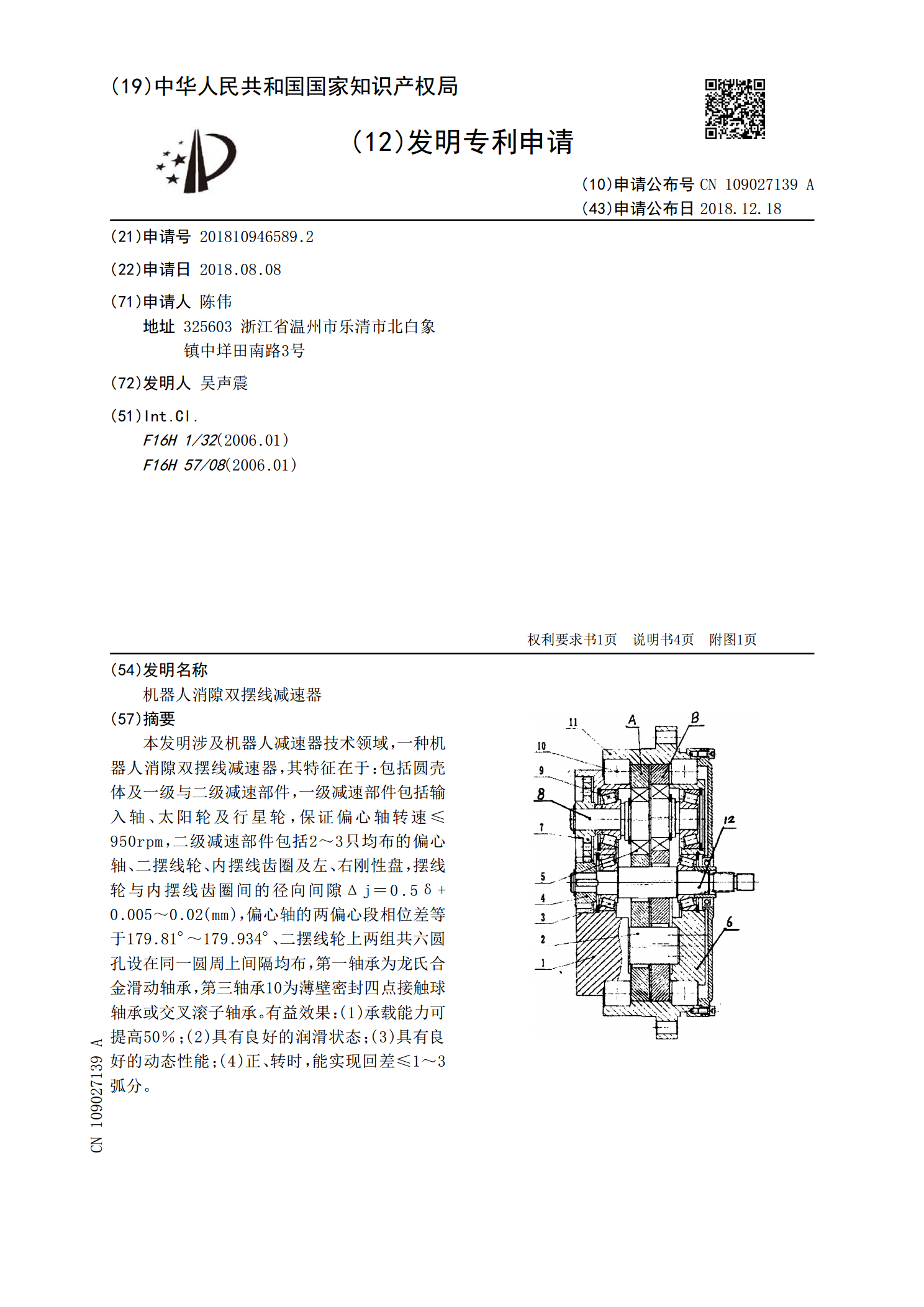
机器人消隙双摆线减速器.pdf
本发明涉及机器人减速器技术领域,一种机器人消隙双摆线减速器,其特征在于:包括圆壳体及一级与二级减速部件,一级减速部件包括输入轴、太阳轮及行星轮,保证偏心轴转速≤950rpm,二级减速部件包括2~3只均布的偏心轴、二摆线轮、内摆线齿圈及左、右刚性盘,摆线轮与内摆线齿圈间的径向间隙Δj=0.5δ+0.005~0.02(mm),偏心轴的两偏心段相位差等于179.81°~179.934°、二摆线轮上两组共六圆孔设在同一圆周上间隔均布,第一轴承为龙氏合金滑动轴承,第三轴承10为薄壁密封四点接触球轴承或交叉滚子轴承。
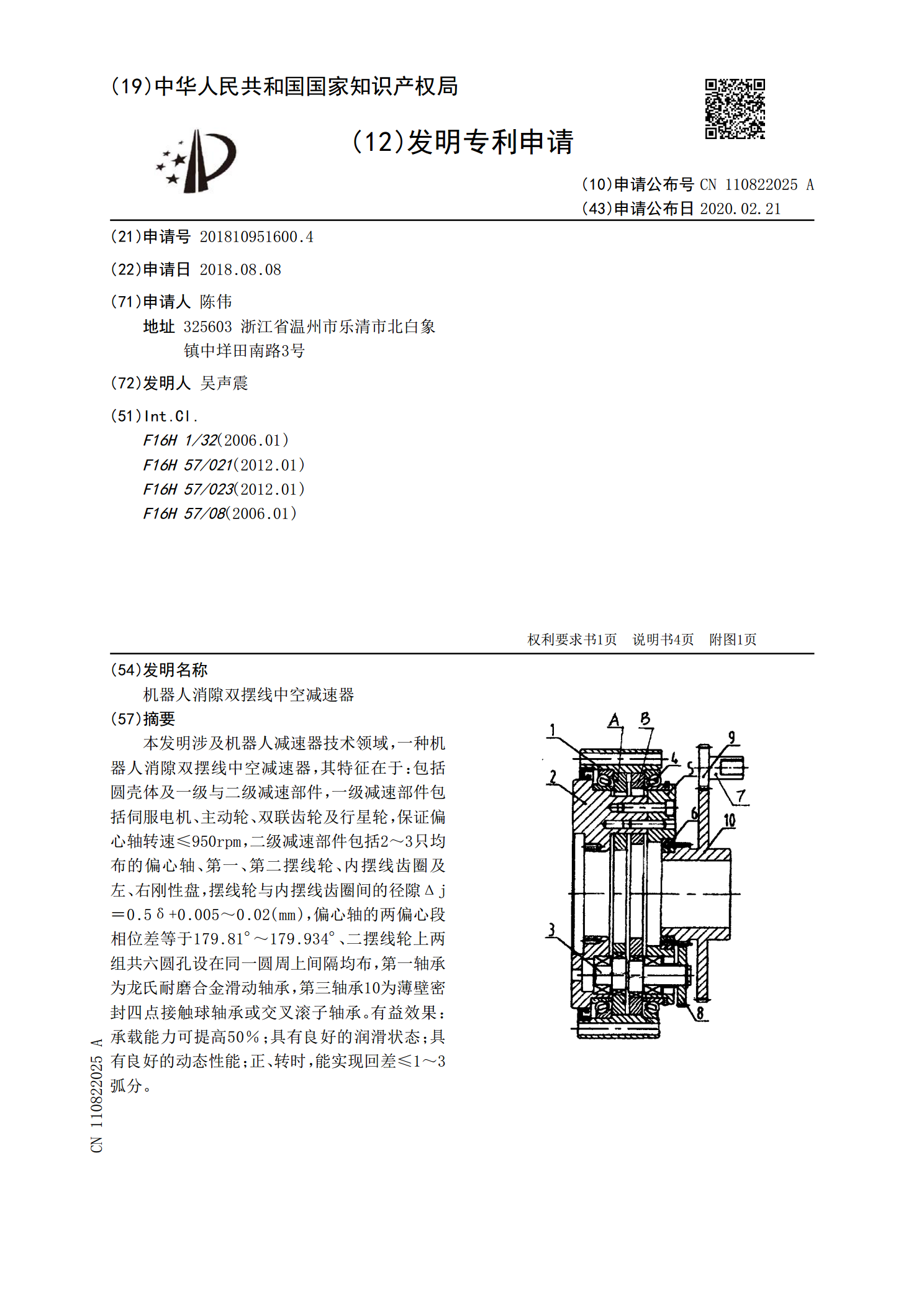
机器人消隙双摆线中空减速器.pdf
本发明涉及机器人减速器技术领域,一种机器人消隙双摆线中空减速器,其特征在于:包括圆壳体及一级与二级减速部件,一级减速部件包括伺服电机、主动轮、双联齿轮及行星轮,保证偏心轴转速≤950rpm,二级减速部件包括2~3只均布的偏心轴、第一、第二摆线轮、内摆线齿圈及左、右刚性盘,摆线轮与内摆线齿圈间的径隙Δj=0.5δ+0.005~0.02(mm),偏心轴的两偏心段相位差等于179.81°~179.934°、二摆线轮上两组共六圆孔设在同一圆周上间隔均布,第一轴承为龙氏耐磨合金滑动轴承,第三轴承10为薄壁密封四点接
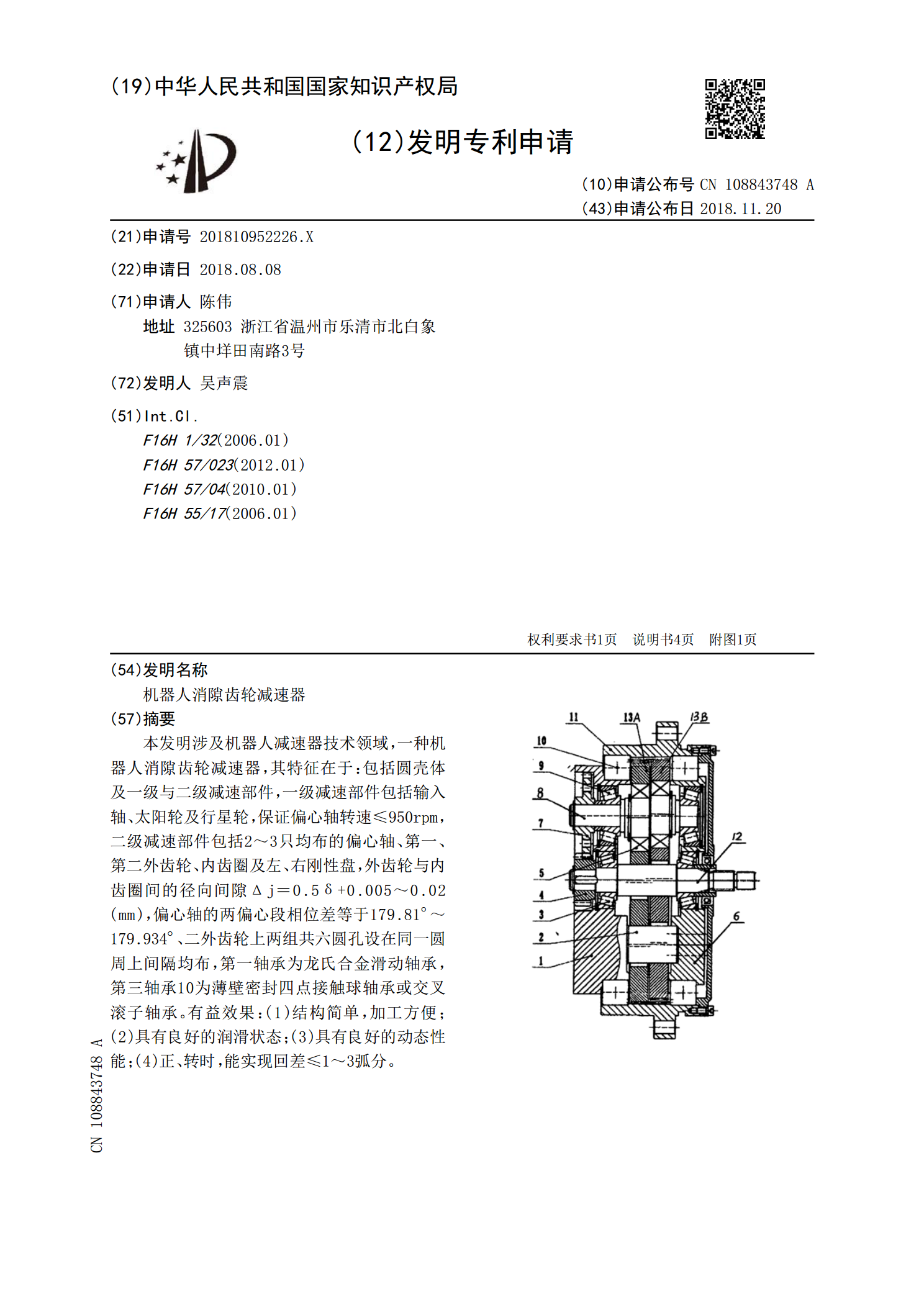
机器人消隙齿轮减速器.pdf
本发明涉及机器人减速器技术领域,一种机器人消隙齿轮减速器,其特征在于:包括圆壳体及一级与二级减速部件,一级减速部件包括输入轴、太阳轮及行星轮,保证偏心轴转速≤950rpm,二级减速部件包括2~3只均布的偏心轴、第一、第二外齿轮、内齿圈及左、右刚性盘,外齿轮与内齿圈间的径向间隙Δj=0.5δ+0.005~0.02(mm),偏心轴的两偏心段相位差等于179.81°~179.934°、二外齿轮上两组共六圆孔设在同一圆周上间隔均布,第一轴承为龙氏合金滑动轴承,第三轴承10为薄壁密封四点接触球轴承或交叉滚子轴承。有