
一种面向自由曲面的柔顺砂带打磨装置.pdf

邻家****ng

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面向自由曲面的柔顺砂带打磨装置.pdf
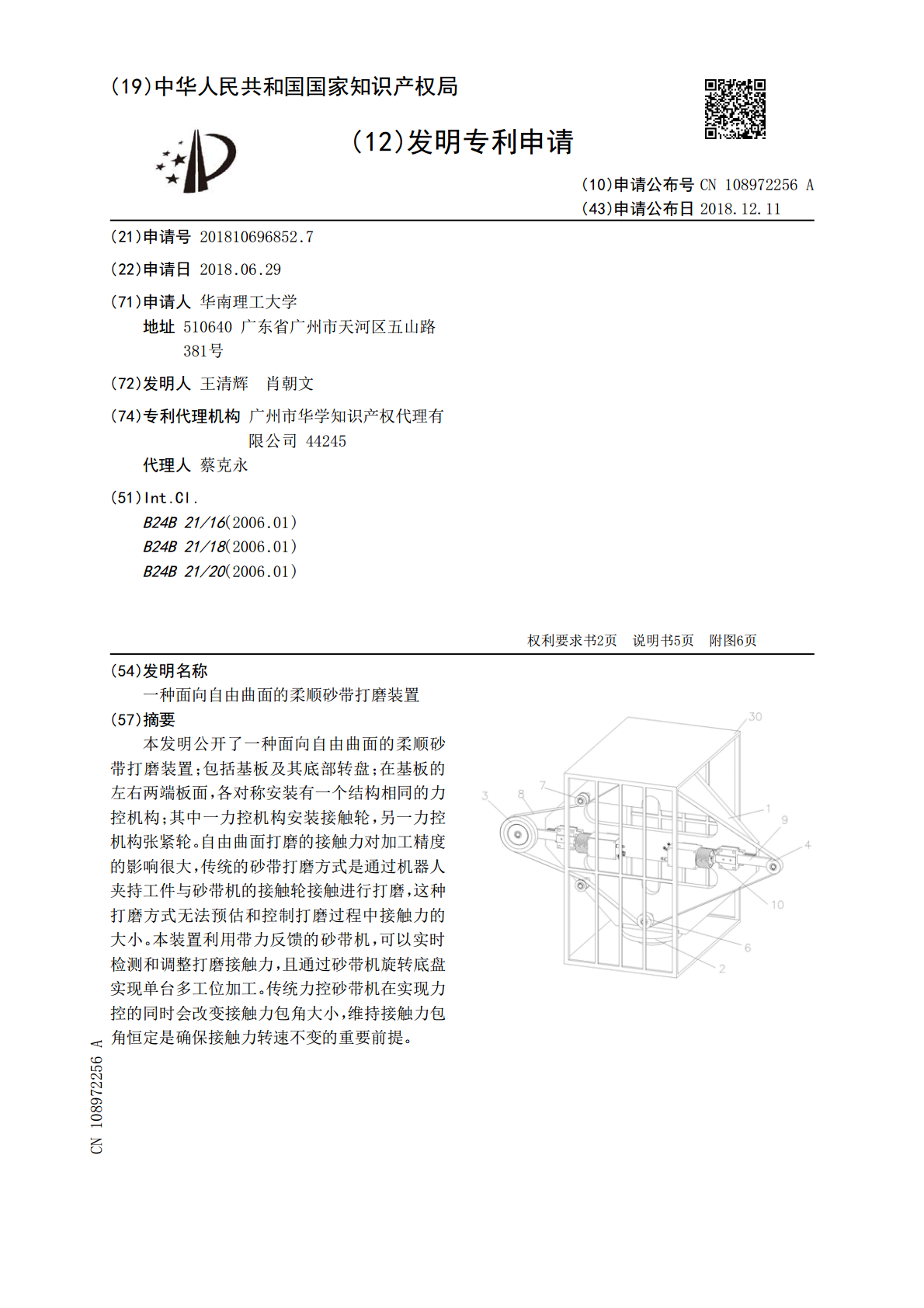
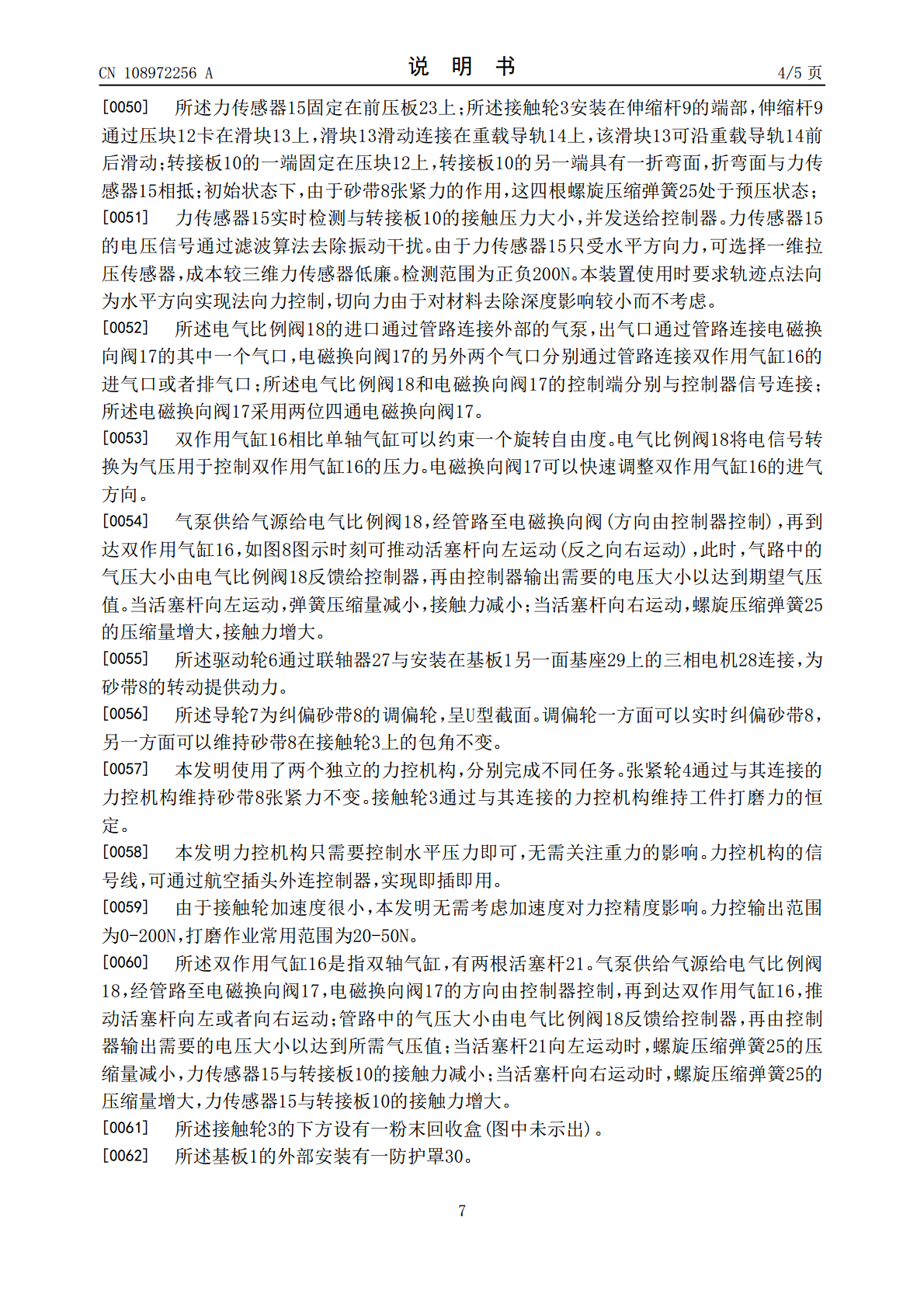
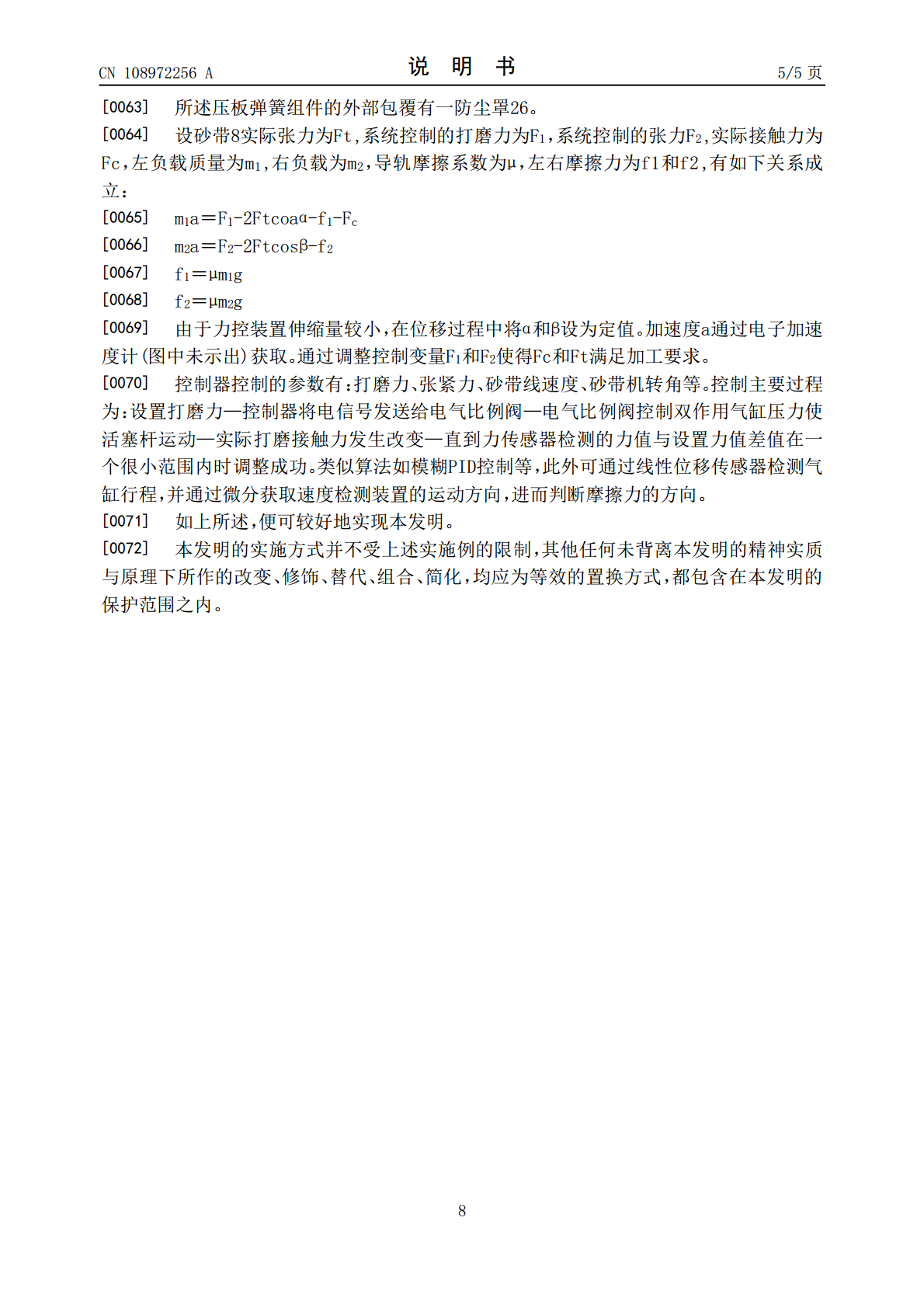
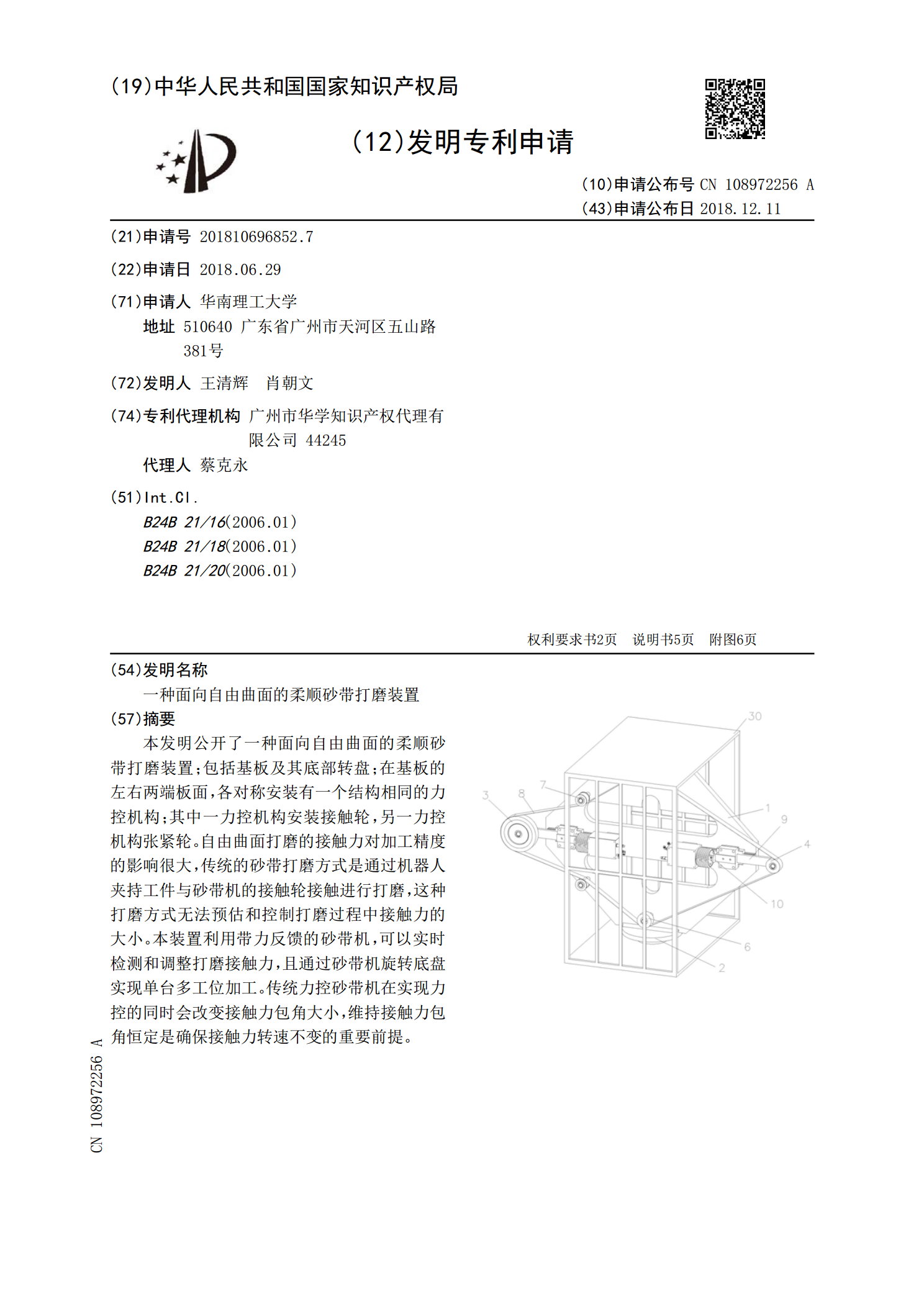
本发明公开了一种面向自由曲面的柔顺砂带打磨装置;包括基板及其底部转盘;在基板的左右两端板面,各对称安装有一个结构相同的力控机构;其中一力控机构安装接触轮,另一力控机构张紧轮。自由曲面打磨的接触力对加工精度的影响很大,传统的砂带打磨方式是通过机器人夹持工件与砂带机的接触轮接触进行打磨,这种打磨方式无法预估和控制打磨过程中接触力的大小。本装置利用带力反馈的砂带机,可以实时检测和调整打磨接触力,且通过砂带机旋转底盘实现单台多工位加工。传统力控砂带机在实现力控的同时会改变接触力包角大小,维持接触力包角恒定是确保接
一种砂带打磨装置.pdf
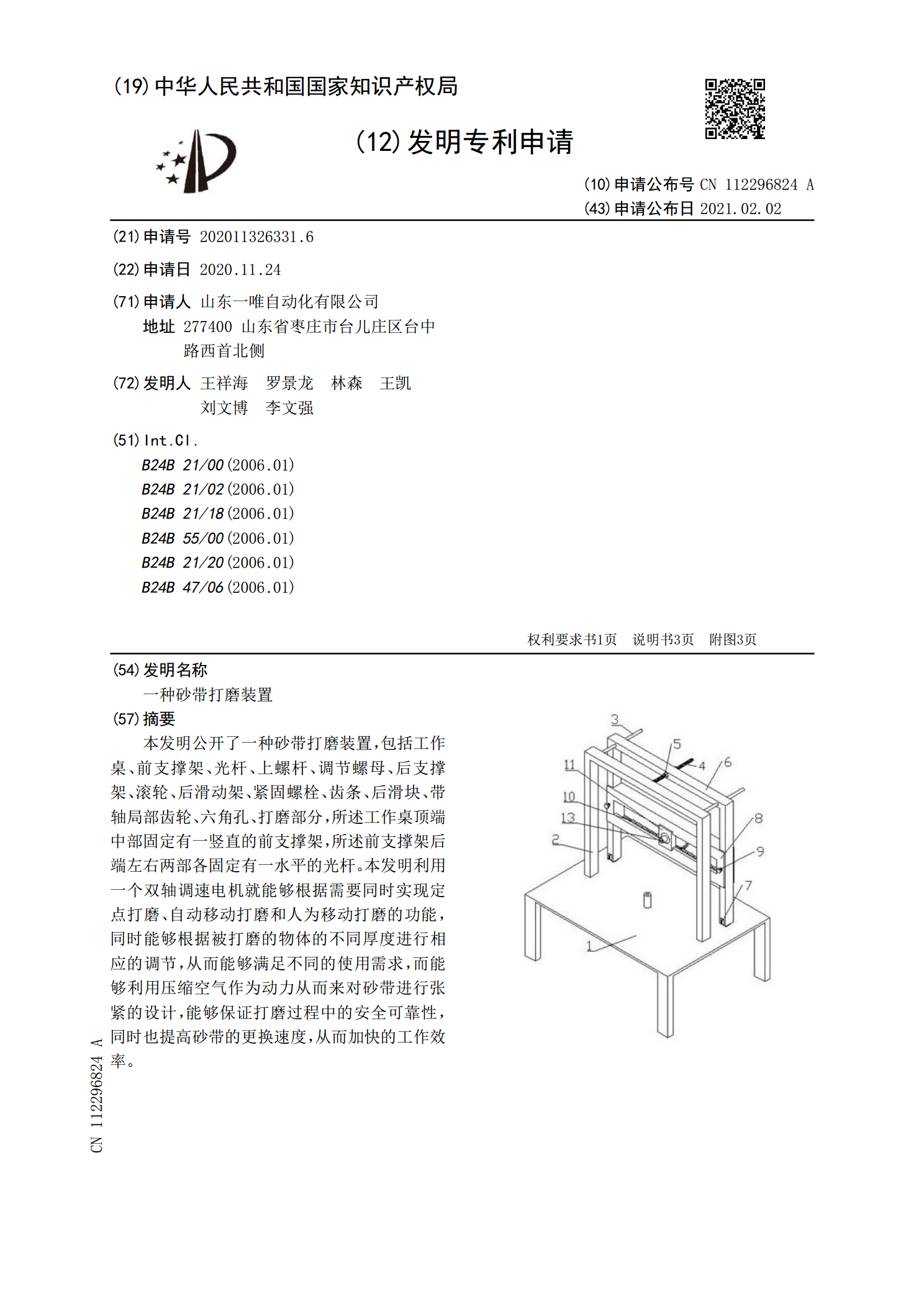
本发明公开了一种砂带打磨装置,包括工作桌、前支撑架、光杆、上螺杆、调节螺母、后支撑架、滚轮、后滑动架、紧固螺栓、齿条、后滑块、带轴局部齿轮、六角孔、打磨部分,所述工作桌顶端中部固定有一竖直的前支撑架,所述前支撑架后端左右两部各固定有一水平的光杆。本发明利用一个双轴调速电机就能够根据需要同时实现定点打磨、自动移动打磨和人为移动打磨的功能,同时能够根据被打磨的物体的不同厚度进行相应的调节,从而能够满足不同的使用需求,而能够利用压缩空气作为动力从而来对砂带进行张紧的设计,能够保证打磨过程中的安全可靠性,同时也提
一种砂带磨削式全类型钢轨打磨装置及其打磨方法.pdf
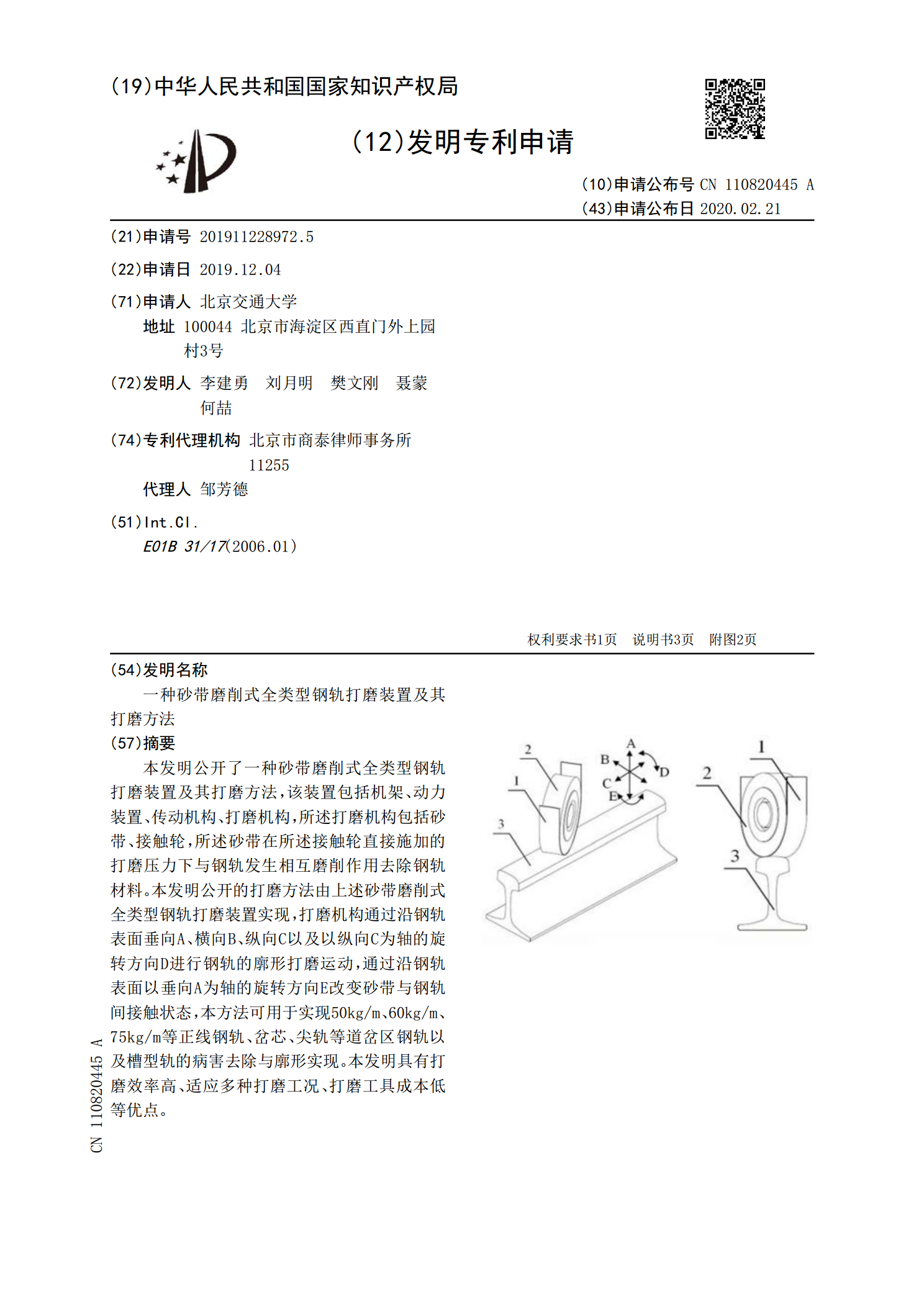
本发明公开了一种砂带磨削式全类型钢轨打磨装置及其打磨方法,该装置包括机架、动力装置、传动机构、打磨机构,所述打磨机构包括砂带、接触轮,所述砂带在所述接触轮直接施加的打磨压力下与钢轨发生相互磨削作用去除钢轨材料。本发明公开的打磨方法由上述砂带磨削式全类型钢轨打磨装置实现,打磨机构通过沿钢轨表面垂向A、横向B、纵向C以及以纵向C为轴的旋转方向D进行钢轨的廓形打磨运动,通过沿钢轨表面以垂向A为轴的旋转方向E改变砂带与钢轨间接触状态,本方法可用于实现50kg/m、60kg/m、75kg/m等正线钢轨、岔芯、尖轨等

一种用于复杂曲面的砂带研磨装置.pdf
本发明公开了一种用于复杂曲面的砂带研磨装置,包括X轴床身、Y轴床身、Z轴床身、工作台组件、磨头座和磨头组件;本发明通过砂带缠绕在放卷轮、收卷轮、接触轮及中间过渡轮系上,在这些轮系的共同作用下,砂带能够产生一定速率的磨削运动。通过六轴联动的方式驱动接触轮,本方法能够实现航空发动机叶片等具有复杂曲面结构的工件只做进给运动的条件下,进行纵横两个方向的磨削加工,而纵向磨削加工所产生的磨纹能够改善工件的疲劳强度等力学性能,获得很好的加工效果。通过六轴联动的控制方式,还能够实现复杂曲面结构的工件其他部位如叶片的根部、
一种砂带打磨机.pdf
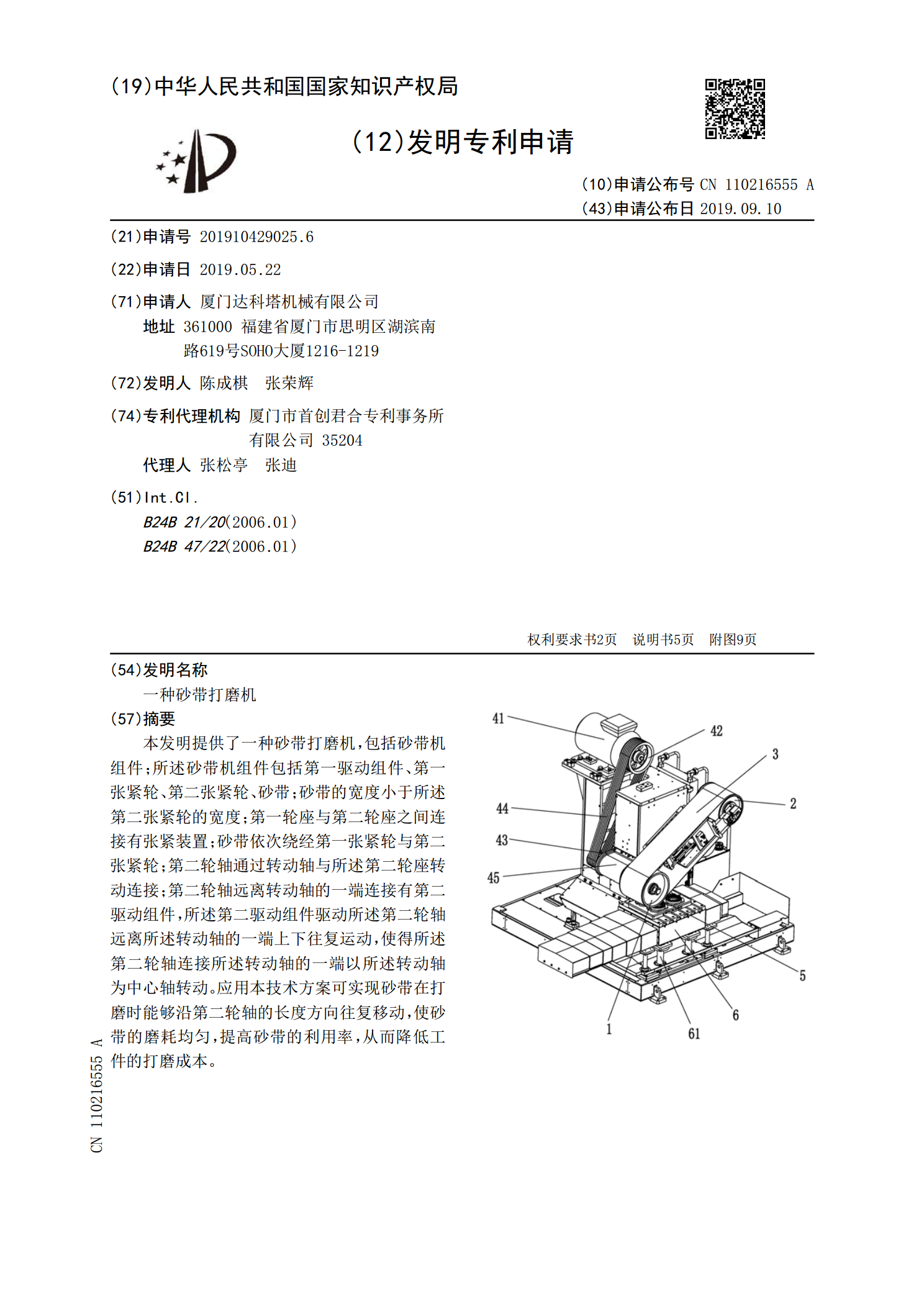
本发明提供了一种砂带打磨机,包括砂带机组件;所述砂带机组件包括第一驱动组件、第一张紧轮、第二张紧轮、砂带;砂带的宽度小于所述第二张紧轮的宽度;第一轮座与第二轮座之间连接有张紧装置;砂带依次绕经第一张紧轮与第二张紧轮;第二轮轴通过转动轴与所述第二轮座转动连接;第二轮轴远离转动轴的一端连接有第二驱动组件,所述第二驱动组件驱动所述第二轮轴远离所述转动轴的一端上下往复运动,使得所述第二轮轴连接所述转动轴的一端以所述转动轴为中心轴转动。应用本技术方案可实现砂带在打磨时能够沿第二轮轴的长度方向往复移动,使砂带的磨耗均