
一种两足四轮可变行走机构多功能仿生机器人系统.pdf

东耀****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种两足四轮可变行走机构多功能仿生机器人系统.pdf
目前的多足类机器人存在着功能单一、移动速度慢、越障能力差等缺点,难以满足人们的需求。为了解决上述问题,本发明提供了一种两足四轮可变行走机构多功能仿生机器人系统,它包括车体、车轮、轮毂电机、机械腿支座、机械腿铰链、上部机械腿连杆、中部机械腿关节、中部机械腿连杆、下部机械腿关节、下部机械腿连杆、机械爪关节、机械爪、机械爪后指、机械爪前指、机械爪末端指阄、前超声波传感器、后超声波传感器、前视觉传感器支座、前视觉传感器、后视觉传感器支座、后视觉传感器、货箱、传感器信号处理系统、机器人控制系统和机器人驱动系统,可以
一种基于气动系统的多功能多足仿生机器人系统.pdf
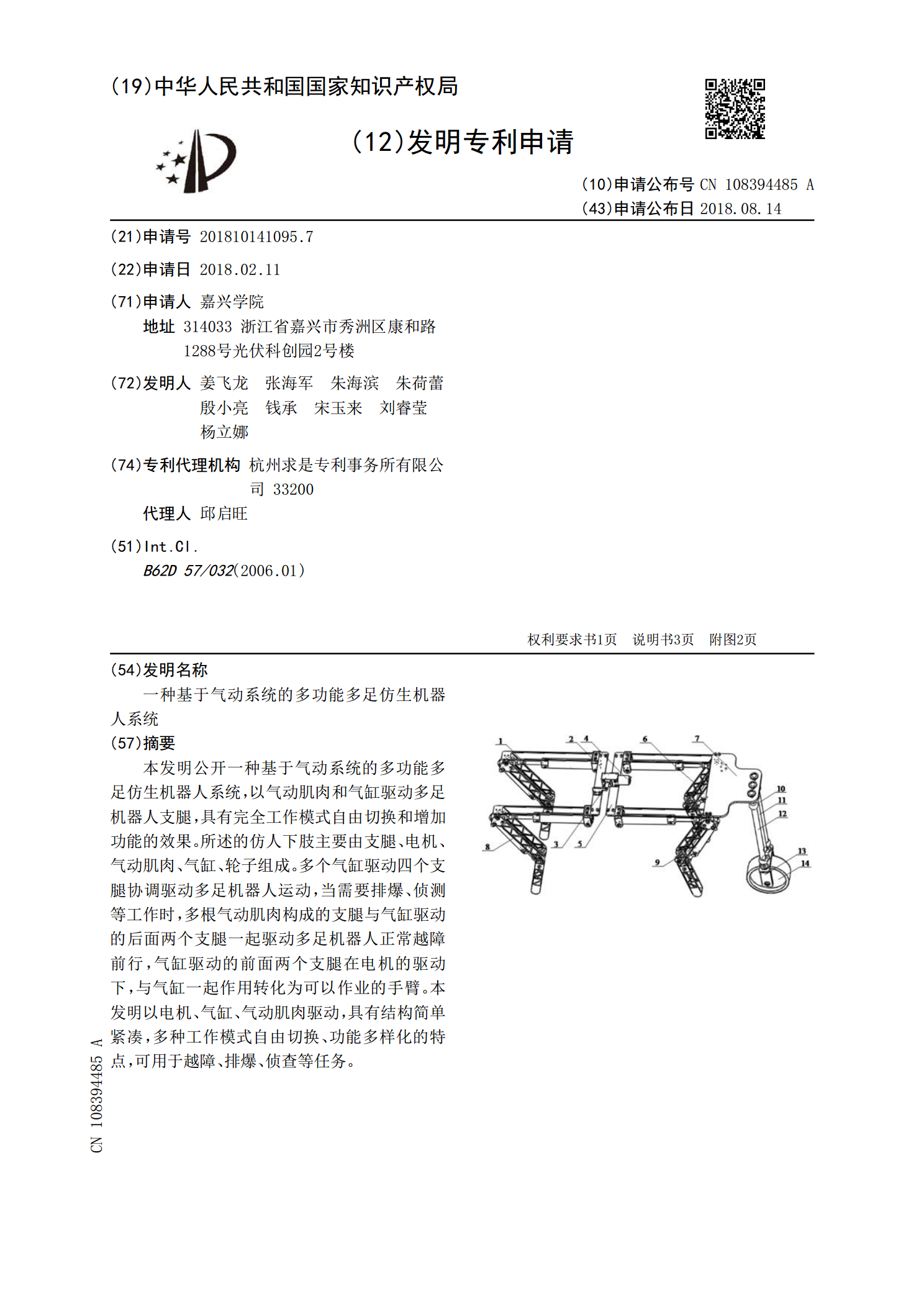
本发明公开一种基于气动系统的多功能多足仿生机器人系统,以气动肌肉和气缸驱动多足机器人支腿,具有完全工作模式自由切换和增加功能的效果。所述的仿人下肢主要由支腿、电机、气动肌肉、气缸、轮子组成。多个气缸驱动四个支腿协调驱动多足机器人运动,当需要排爆、侦测等工作时,多根气动肌肉构成的支腿与气缸驱动的后面两个支腿一起驱动多足机器人正常越障前行,气缸驱动的前面两个支腿在电机的驱动下,与气缸一起作用转化为可以作业的手臂。本发明以电机、气缸、气动肌肉驱动,具有结构简单紧凑,多种工作模式自由切换、功能多样化的特点,可用于
双足仿生机器人行走机构设计.pdf
未知驱动探索,专注成就专业双足仿生机器人行走机构设计1.引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。2.设计原理双足仿生机器人的行走机构设计基于人类步行的原理。人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。3.结构设计双足仿生机器人的行走机构包括
一种两足步行仿生机器人.pdf
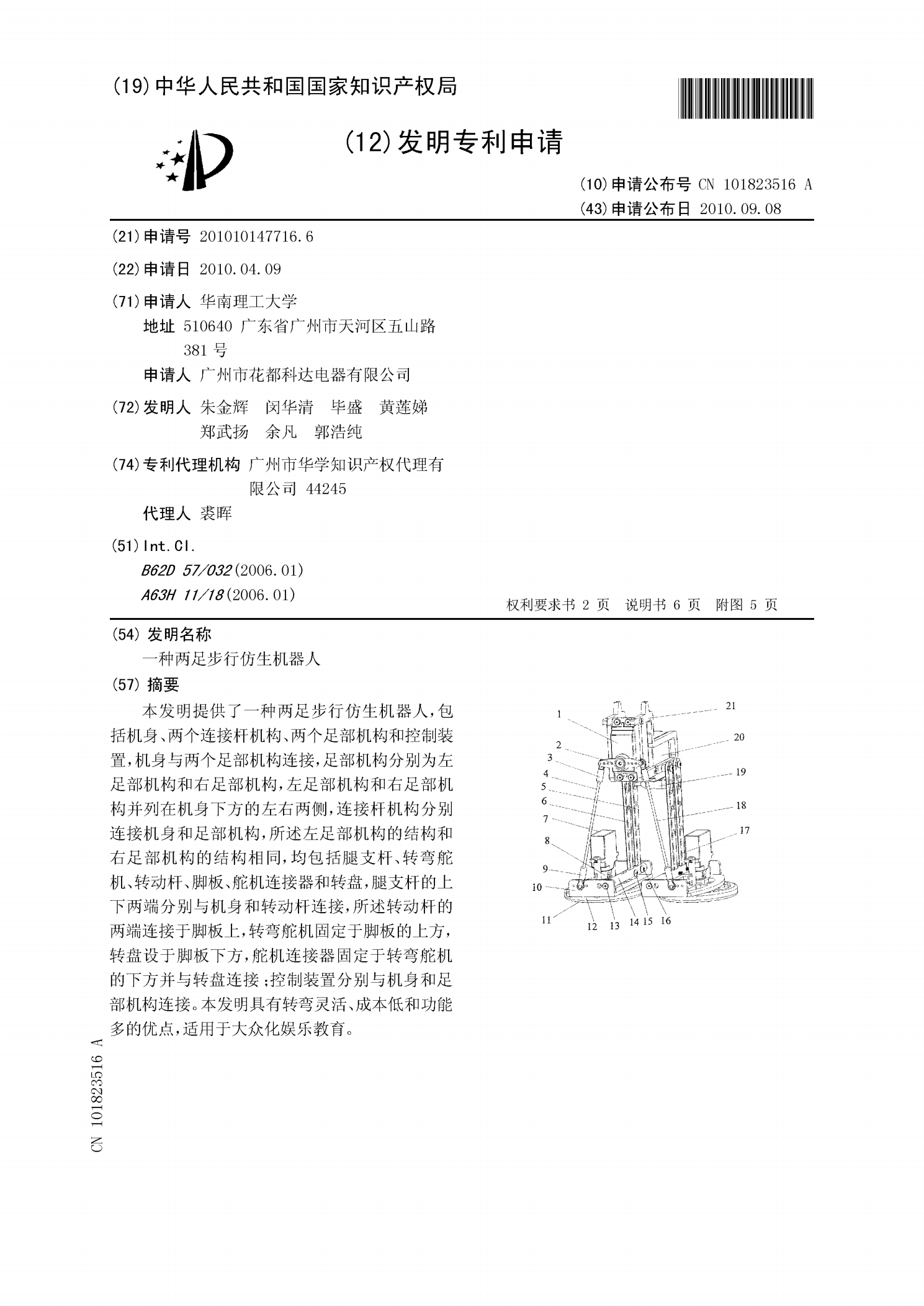
本发明提供了一种两足步行仿生机器人,包括机身、两个连接杆机构、两个足部机构和控制装置,机身与两个足部机构连接,足部机构分别为左足部机构和右足部机构,左足部机构和右足部机构并列在机身下方的左右两侧,连接杆机构分别连接机身和足部机构,所述左足部机构的结构和右足部机构的结构相同,均包括腿支杆、转弯舵机、转动杆、脚板、舵机连接器和转盘,腿支杆的上下两端分别与机身和转动杆连接,所述转动杆的两端连接于脚板上,转弯舵机固定于脚板的上方,转盘设于脚板下方,舵机连接器固定于转弯舵机的下方并与转盘连接;控制装置分别与机身和足

汽车多足仿生行走机构和控制系统的研究.docx
汽车多足仿生行走机构和控制系统的研究近年来,仿生学在机械领域中被广泛应用,汽车多足仿生行走机构也是其中之一。在研发多足仿生行走机构及其控制系统的过程中,科学家们从自然界中的许多生物中获得了灵感,并尝试将其应用于汽车制造中,以实现更高的运动灵活性和行驶能力。本文将分别从多足仿生机构和控制系统两个方面进行分析。一、多足仿生机构多足仿生机构是指模拟生物动物、昆虫等生物的多条腿的运动特性,设计出的机械构造。它的结构及其运动方式可以成为人们设计机器人的参考。多足机器人通常被设计为6条或更多的腿,以提高它们的稳定性和