
可全向移动的滑板.pdf

王秋****哥哥


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
可全向移动的滑板.pdf
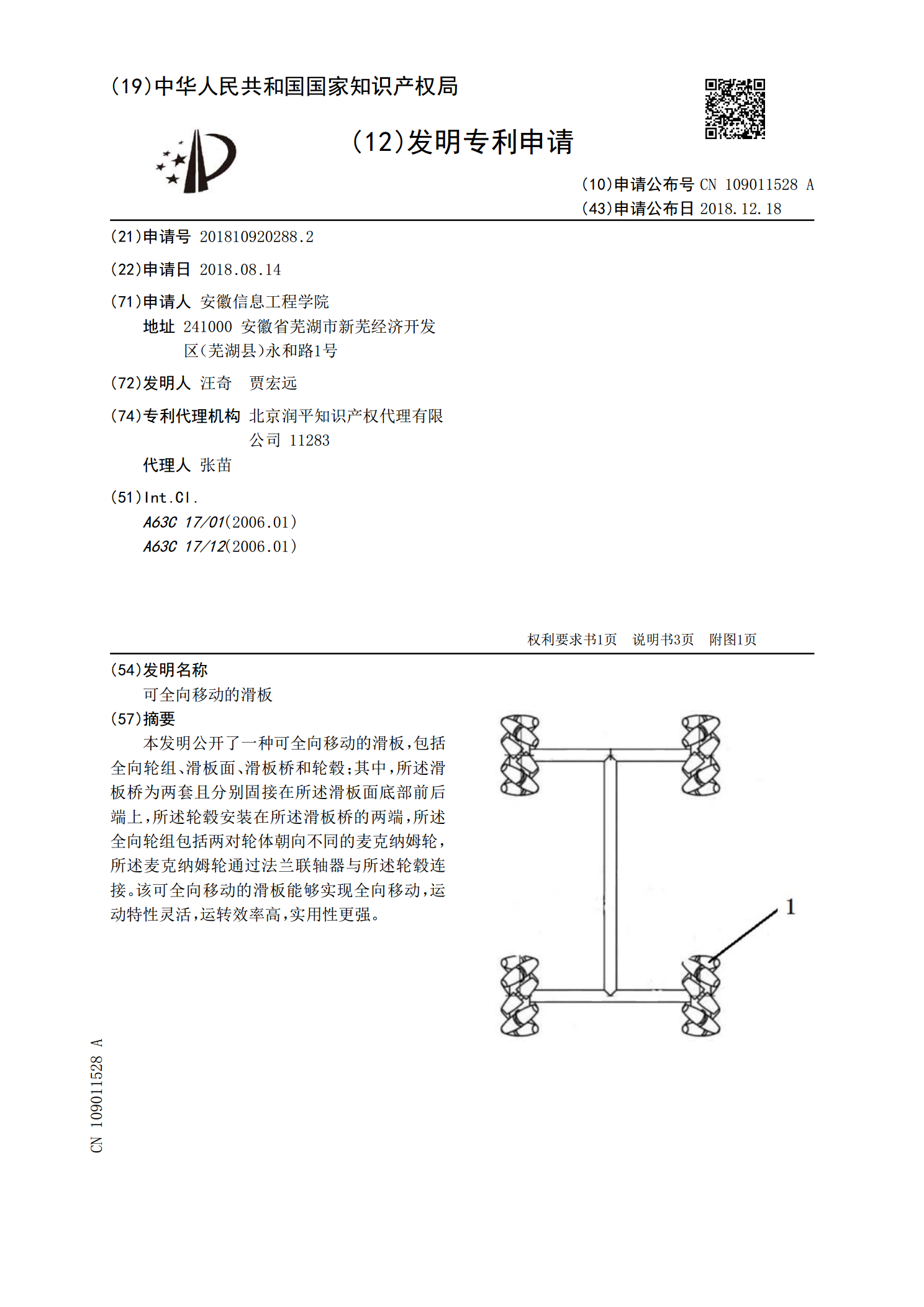
本发明公开了一种可全向移动的滑板,包括全向轮组、滑板面、滑板桥和轮毂;其中,所述滑板桥为两套且分别固接在所述滑板面底部前后端上,所述轮毂安装在所述滑板桥的两端,所述全向轮组包括两对轮体朝向不同的麦克纳姆轮,所述麦克纳姆轮通过法兰联轴器与所述轮毂连接。该可全向移动的滑板能够实现全向移动,运动特性灵活,运转效率高,实用性更强。

可全向移动的升降平台车.pdf
本发明公开可全向移动的升降平台车,包括底盘、设于底盘上的升降平台,所述底盘一端两侧对称设有传动轮、另一端对称设有万向轮,所述底盘与升降平台两侧之间设有升降组件,所述升降组件上设有滚珠丝杆,所述滚珠丝杆的一端固定在升降平台内、其接有升降摇杆;所述升降组件上还设有链轮、且所有链轮呈Z字型结构分布,固定在升降平台上的链轮连接有若干个变速齿轮,所述变速齿轮通过传动齿轮连接有进退摇杆。本升降装置灵活快捷调节高度和直线上的移动,省时省力且调节方便快捷,应用领域广,同时升降装置可折叠压缩,方便搬运与存放,工作效率高,实
可全向移动的机器人.pdf
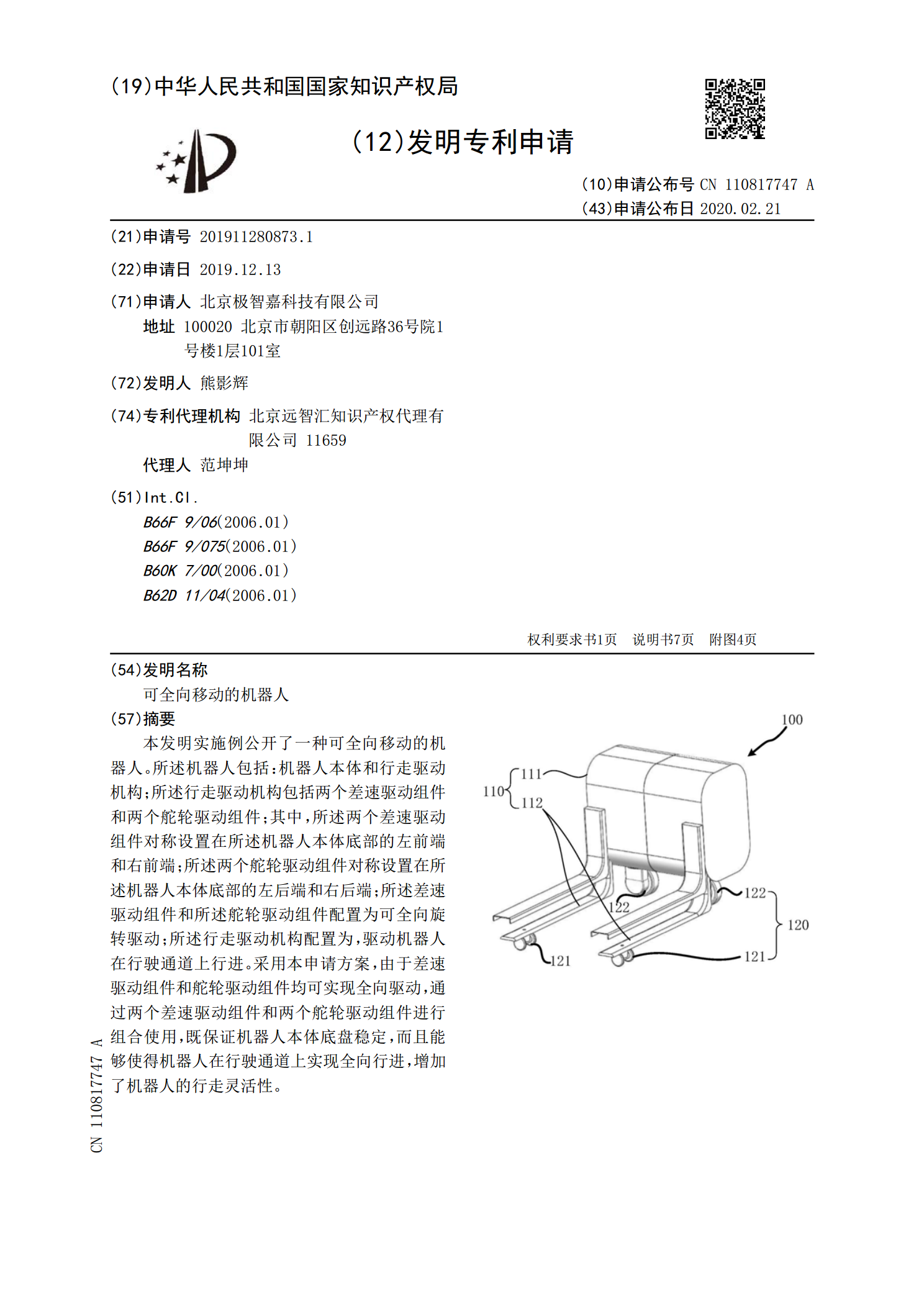
本发明实施例公开了一种可全向移动的机器人。所述机器人包括:机器人本体和行走驱动机构;所述行走驱动机构包括两个差速驱动组件和两个舵轮驱动组件;其中,所述两个差速驱动组件对称设置在所述机器人本体底部的左前端和右前端;所述两个舵轮驱动组件对称设置在所述机器人本体底部的左后端和右后端;所述差速驱动组件和所述舵轮驱动组件配置为可全向旋转驱动;所述行走驱动机构配置为,驱动机器人在行驶通道上行进。采用本申请方案,由于差速驱动组件和舵轮驱动组件均可实现全向驱动,通过两个差速驱动组件和两个舵轮驱动组件进行组合使用,既保证机

一种全向轮、全向轮组件及可移动装置.pdf
本发明公开了一种全向轮、全向轮组件及可移动装置,其中全向轮包括轮毂和多个从动轮,轮毂的外周上设置多个安装齿,相邻的两个安装齿之间形成容纳从动轮的安装槽,各安装齿上均设置两个固定槽,固定槽的一端贯穿轮毂端面形成插入口,从动轮呈圆柱状,从动轮套接在中轴上,中轴两端伸出到从动轮外部,中轴两端置于两侧的固定槽内,还包括固定板,固定板盖合插入口并固定在安装齿上,使中轴限制在固定槽内。本发明所述的全向轮通过固定板将从动轮的中轴固定在轮毂的固定槽内,安装方式简单,安装后便于维护;限位结构有效防止固定板的移动,使全向轮的
一种可全向移动的叉车.pdf
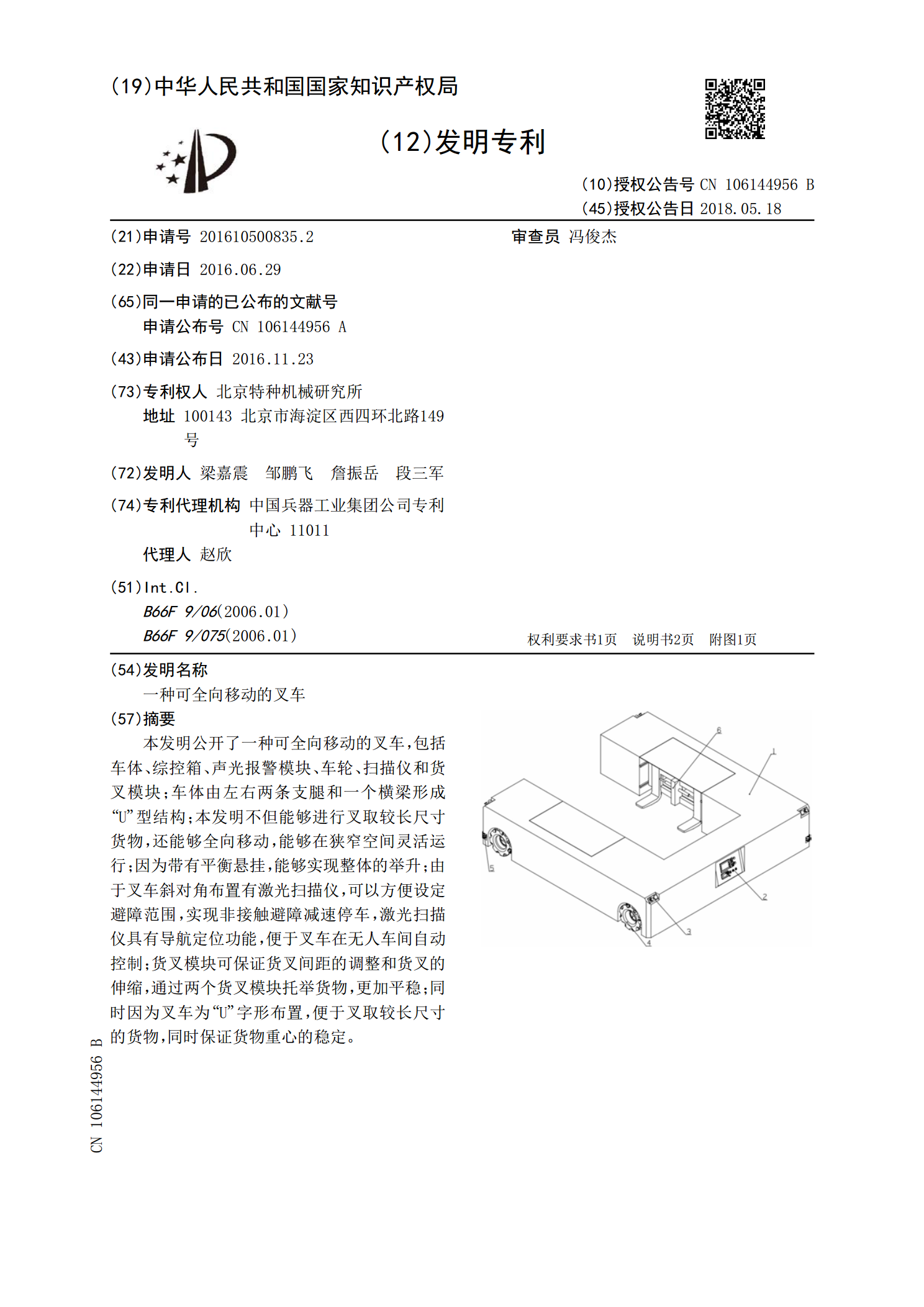
本发明公开了一种可全向移动的叉车,包括车体、综控箱、声光报警模块、车轮、扫描仪和货叉模块;车体由左右两条支腿和一个横梁形成“U”型结构;本发明不但能够进行叉取较长尺寸货物,还能够全向移动,能够在狭窄空间灵活运行;因为带有平衡悬挂,能够实现整体的举升;由于叉车斜对角布置有激光扫描仪,可以方便设定避障范围,实现非接触避障减速停车,激光扫描仪具有导航定位功能,便于叉车在无人车间自动控制;货叉模块可保证货叉间距的调整和货叉的伸缩,通过两个货叉模块托举货物,更加平稳;同时因为叉车为“U”字形布置,便于叉取较长尺寸的