
一种无线视频监控智能小车.pdf

玉环****找我

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无线视频监控智能小车.pdf
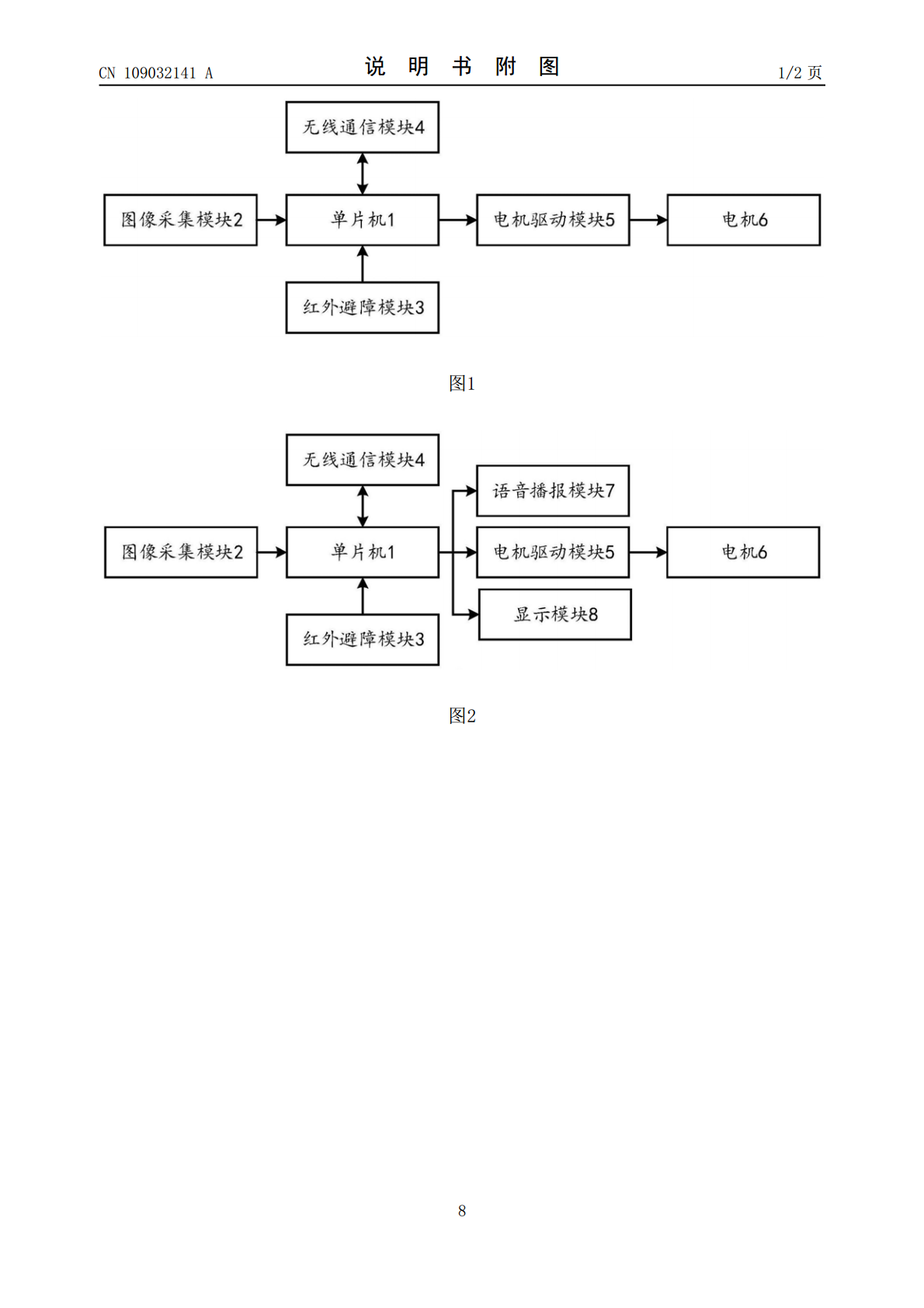
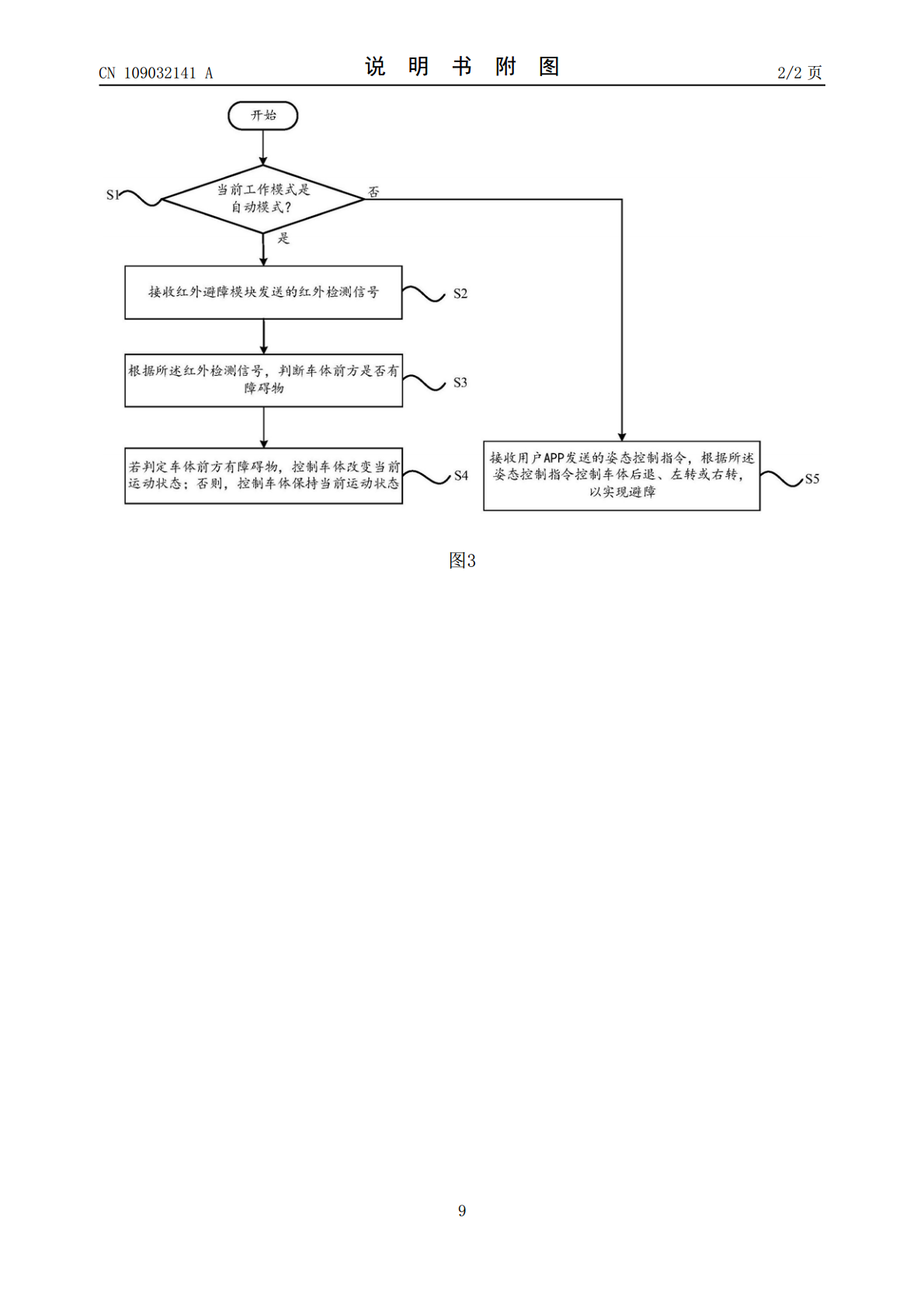
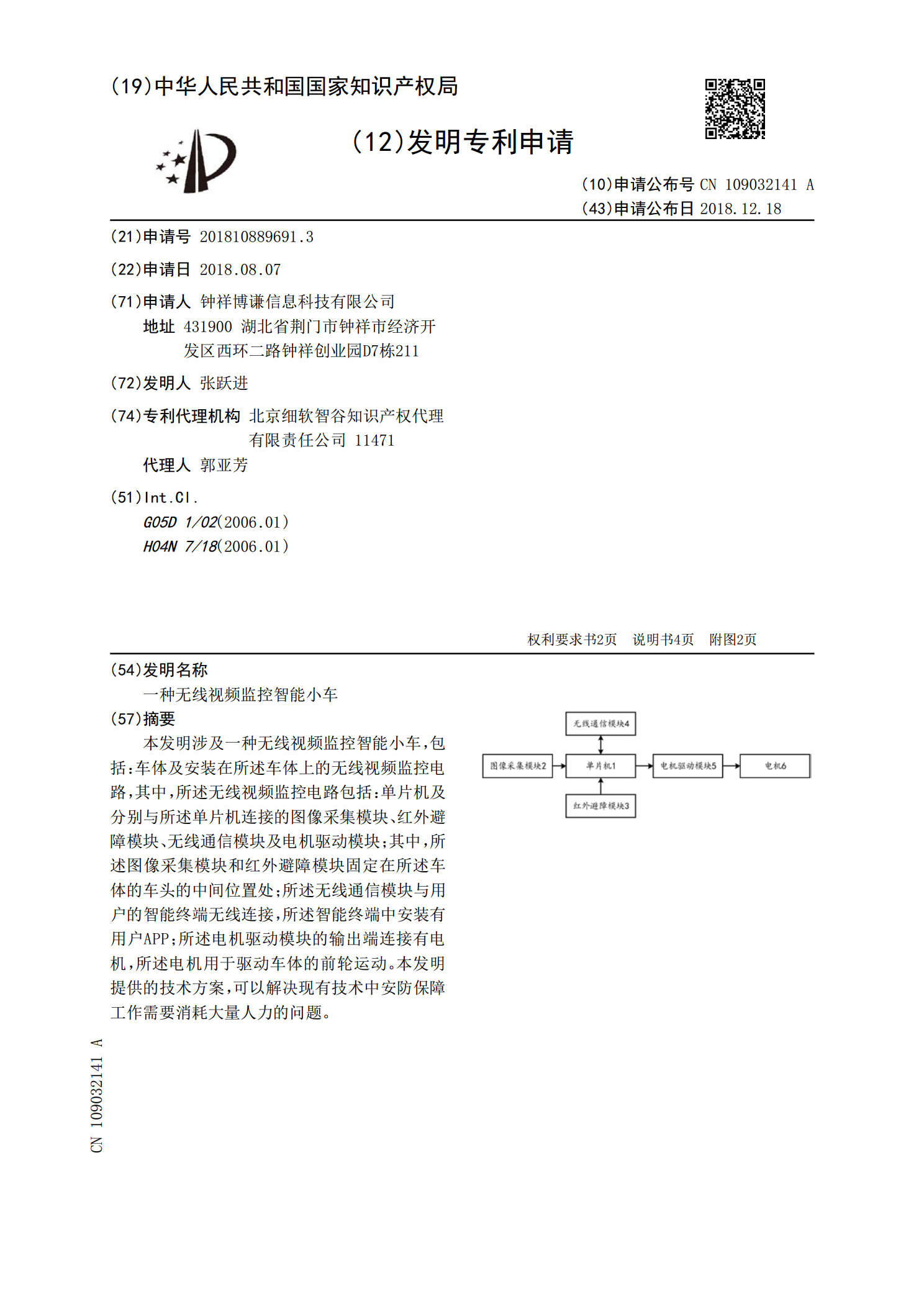
本发明涉及一种无线视频监控智能小车,包括:车体及安装在所述车体上的无线视频监控电路,其中,所述无线视频监控电路包括:单片机及分别与所述单片机连接的图像采集模块、红外避障模块、无线通信模块及电机驱动模块;其中,所述图像采集模块和红外避障模块固定在所述车体的车头的中间位置处;所述无线通信模块与用户的智能终端无线连接,所述智能终端中安装有用户APP;所述电机驱动模块的输出端连接有电机,所述电机用于驱动车体的前轮运动。本发明提供的技术方案,可以解决现有技术中安防保障工作需要消耗大量人力的问题。

基于STM32的无线视频监控智能小车设计.pptx
基于STM32的无线视频监控智能小车设计目录添加目录项标题智能小车的整体设计硬件架构软件架构无线视频监控功能实现智能小车的运动控制STM32核心板设计主控芯片选型电源电路设计通信接口设计传感器接入设计无线视频传输模块设计摄像头选型及接口设计图像采集及压缩算法实现Wi-Fi模块选型及配置视频流推送至云平台智能小车运动控制模块设计电机驱动电路设计速度与方向控制算法实现避障传感器选型及接入路径规划算法实现实验测试与结果分析实验环境搭建运动控制性能测试无线视频传输质量测试综合性能评价总结与展望设计总结项目创新点与
基于STM32的无线视频监控智能小车设计.pdf
基于STM32的无线视频监控智能小车设计基于STM32的无线视频监控智能小车设计一、引言近年来,无线视频监控技术得到了广泛应用,它可以通过无线传输将监控画面实时传输到控制中心或者移动设备上,大大方便了人们对于远程地点的监控。为了更好地应用无线视频监控,本文设计了一种基于STM32的无线视频监控智能小车。该小车可以通过无线网络与控制端建立连接,实时传输视频监控画面,并且可以通过遥控方式进行控制和操作。二、设计思路1.硬件设计本设计的控制核心采用了STM32系列单片机。STM32单片机具有强大的性能和丰富的资

基于STM32的无线视频监控智能小车设计的中期报告.docx
基于STM32的无线视频监控智能小车设计的中期报告一、项目介绍本项目基于STM32F407ZGT6微控制器,实现了一个无线视频监控智能小车,具有自主遥控及视频监控功能,主要用于实时观察车辆周围环境及进行移动目标跟踪等应用场景。二、主要任务1.实现小车底盘控制及自主遥控功能2.集成摄像头,实现视频采集、传输及处理3.搭建无线通信模块,实现监控数据的实时传输及接收4.实现移动目标跟踪算法,提高监控效果三、进展情况1.小车底盘搭建底盘由两个驱动轮和一个万向轮组成,采用STM32F407ZGT6作为控制芯片,通过
一种智能家庭无线视频监控系统.pdf
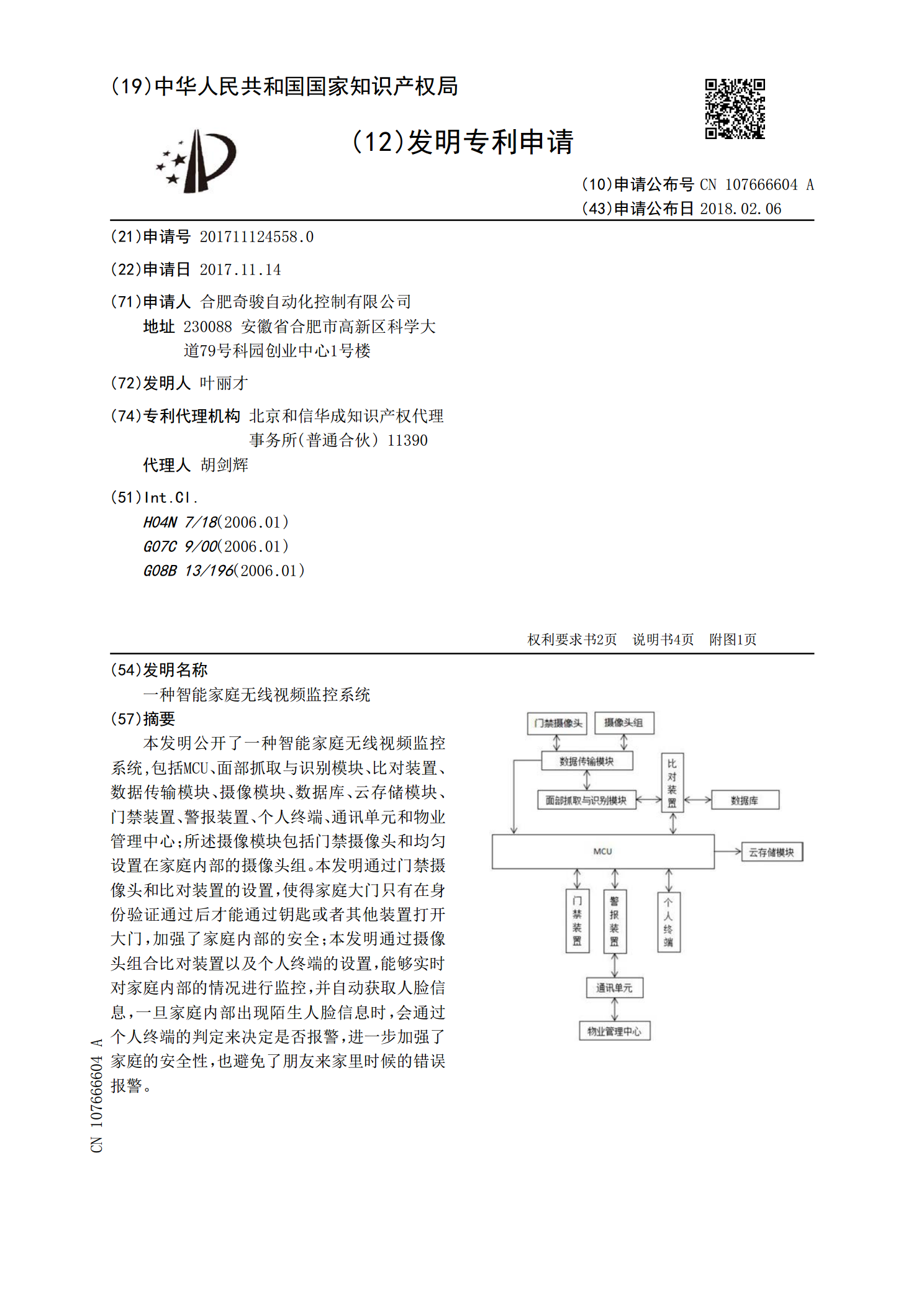
本发明公开了一种智能家庭无线视频监控系统,包括MCU、面部抓取与识别模块、比对装置、数据传输模块、摄像模块、数据库、云存储模块、门禁装置、警报装置、个人终端、通讯单元和物业管理中心;所述摄像模块包括门禁摄像头和均匀设置在家庭内部的摄像头组。本发明通过门禁摄像头和比对装置的设置,使得家庭大门只有在身份验证通过后才能通过钥匙或者其他装置打开大门,加强了家庭内部的安全;本发明通过摄像头组合比对装置以及个人终端的设置,能够实时对家庭内部的情况进行监控,并自动获取人脸信息,一旦家庭内部出现陌生人脸信息时,会通过个人