
人工智能辅助的物流分拣机器人系统.pdf

mm****酱吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

人工智能辅助的物流分拣机器人系统.pdf
本发明涉及工业自动化装备,更具体地说,涉及一种用于实现物料分拣的机器人装备。一种人工智能辅助的物流分拣机器人系统,包括智能化控制系统和分拣流水线机器人;所述分拣流水线机器人包括:支撑机构、用于实现物料分拣的机械手、用于驱动所述机械手实现移动的链条机构、用于驱动所述链条机构运动的驱动机构、用于驱动所述机械手实现手爪开合的上凸轮压板、用于驱动所述机械手实现纵向运动的环形凸轮、动态轨道机构和推料机械手机构的联合支架、用于实现所述机械手和推料机械手机构同步运动的同步传动机构、用于驱动所述联合支架实现纵向移动的纵向

带人工智能的物流分拣机器人.pdf
本发明涉及工业自动化装备,更具体地说,涉及一种用于实现物料分拣的机器人装备。一种带人工智能的物流分拣机器人,包括智能化控制系统和分拣流水线机器人;所述分拣流水线机器人包括:支撑机构、用于实现物料分拣的机械手、用于驱动所述机械手实现移动的链条机构、用于驱动所述链条机构运动的驱动机构、用于驱动所述机械手实现手爪开合的上凸轮压板、用于驱动所述机械手实现纵向运动的环形凸轮、用于承载物料的动态轨道机构、用于将物料推向所述机械手的推料机械手机构、用于固定支撑机构、动态轨道机构和推料机械手机构的联合支架。本发明应用在物

分拣机器人以及物流分拣系统.pdf
本发明提供了一种分拣机器人以及物流分拣系统,涉及物流技术领域,包括底盘、升降装置和输送装置,升降装置设置在底盘上,输送装置设置在升降装置上,输送装置包括纵向设置的至少两个纵向分层设置的输送单元,相邻层所述输送单元通过侧挡板纵向固定,所述侧挡板通过限定相邻层所述输送单元之间的间距,以在相邻层所述输送单元之间限定出暂存空间,所述暂存空间被配置为用于存放分拣目标,所述升降装置被配置为用于通过升降运动调节所述输送单元的高度,所述输送单元被配置为用于输送所述分拣目标。通过增加输送单元的数量提高单次输送分拣目标的数量
物流用人工智能物件分拣机器人.pdf
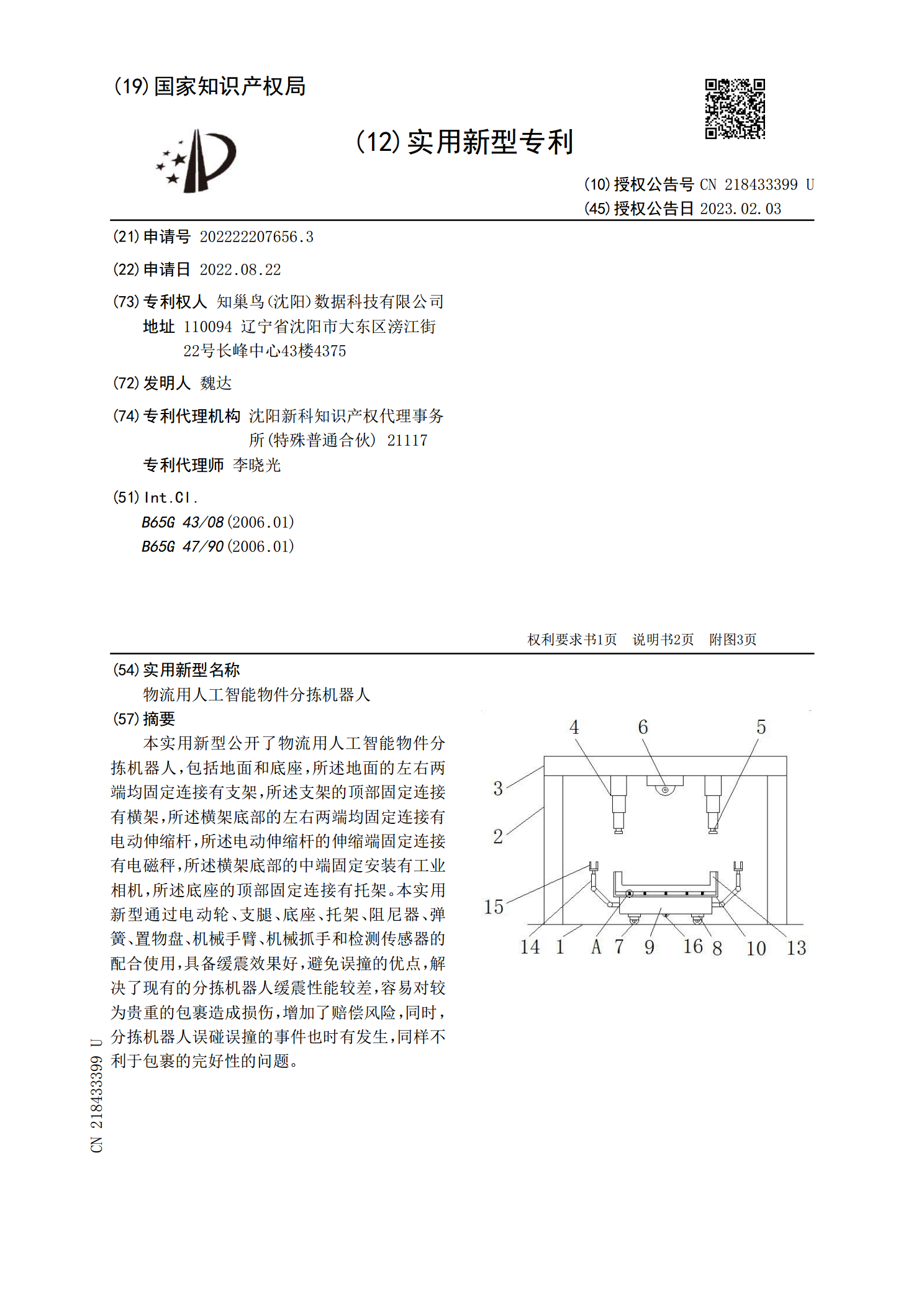
本实用新型公开了物流用人工智能物件分拣机器人,包括地面和底座,所述地面的左右两端均固定连接有支架,所述支架的顶部固定连接有横架,所述横架底部的左右两端均固定连接有电动伸缩杆,所述电动伸缩杆的伸缩端固定连接有电磁秤,所述横架底部的中端固定安装有工业相机,所述底座的顶部固定连接有托架。本实用新型通过电动轮、支腿、底座、托架、阻尼器、弹簧、置物盘、机械手臂、机械抓手和检测传感器的配合使用,具备缓震效果好,避免误撞的优点,解决了现有的分拣机器人缓震性能较差,容易对较为贵重的包裹造成损伤,增加了赔偿风险,同时,分拣

应用人工智能的机器人分拣系统.pdf
本发明涉及工业自动化装备,更具体地说,涉及一种用于实现物料分拣的机器人装备。一种应用人工智能的机器人分拣系统,包括智能化控制系统和分拣流水线机器人;所述分拣流水线机器人包括:支撑机构、用于实现物料分拣的机械手、用于驱动所述机械手实现移动的链条机构、用于驱动所述链条机构运动的驱动机构、用于驱动所述机械手实现手爪开合的上凸轮压板、用于固定支撑机构、动态轨道机构和推料机械手机构的联合支架、用于实现所述机械手和推料机械手机构同步运动的同步传动机构、用于驱动所述联合支架实现纵向移动的纵向移动机构、用于驱动所述纵向移