
舰载直升机自适应起落架着舰模拟系统.pdf

春兰****89

1/7
2/7
3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
舰载直升机自适应起落架着舰模拟系统.pdf
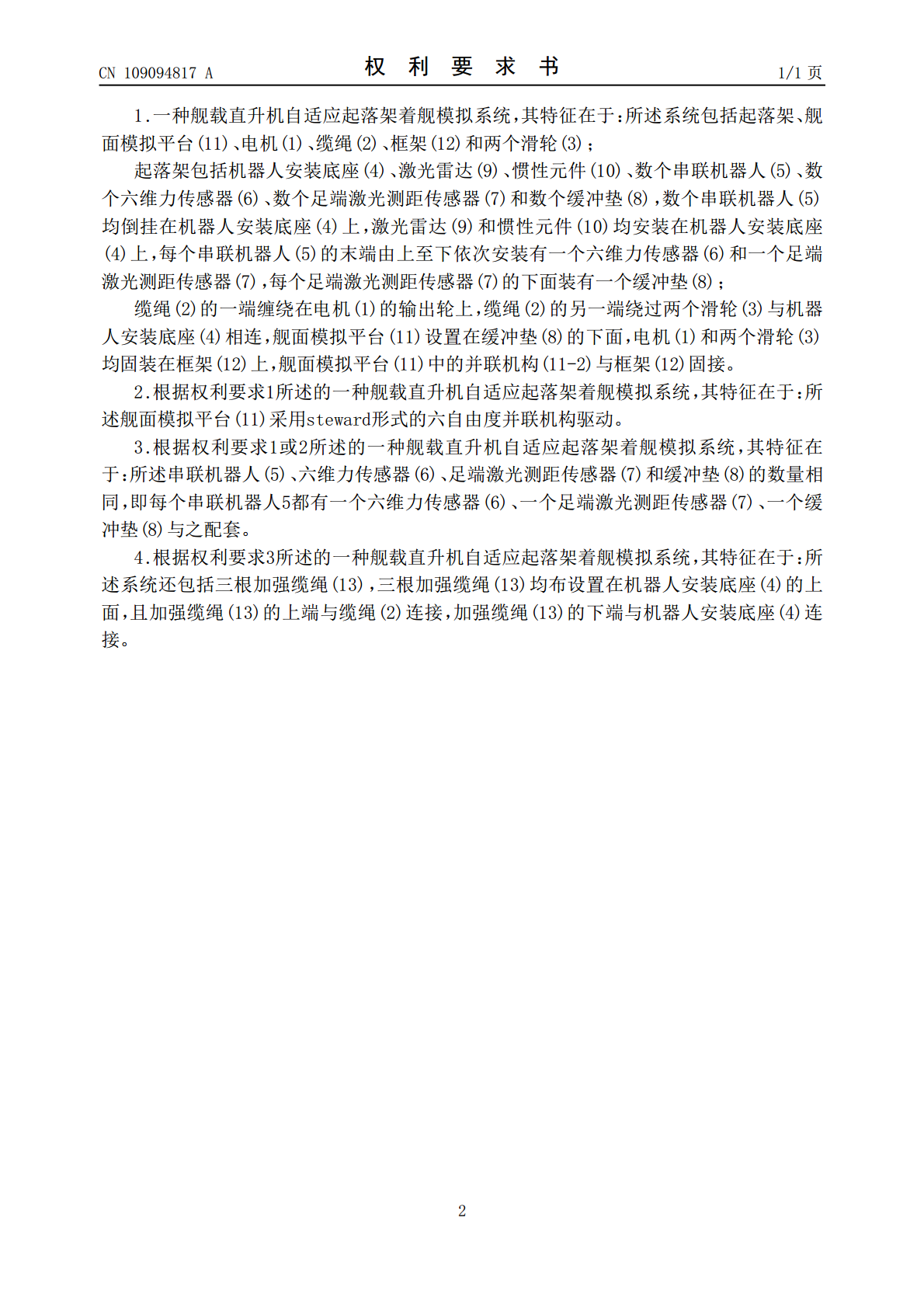
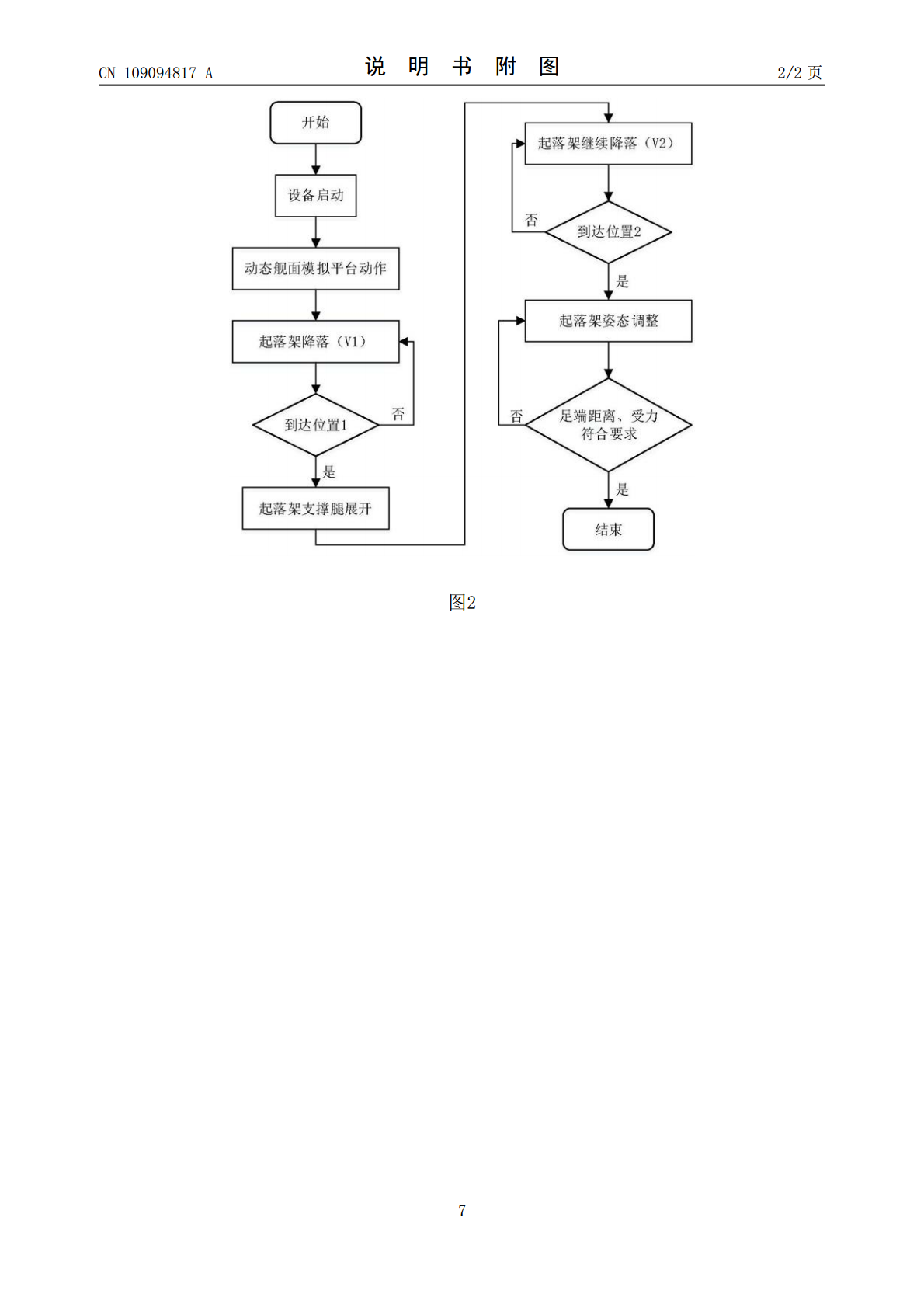
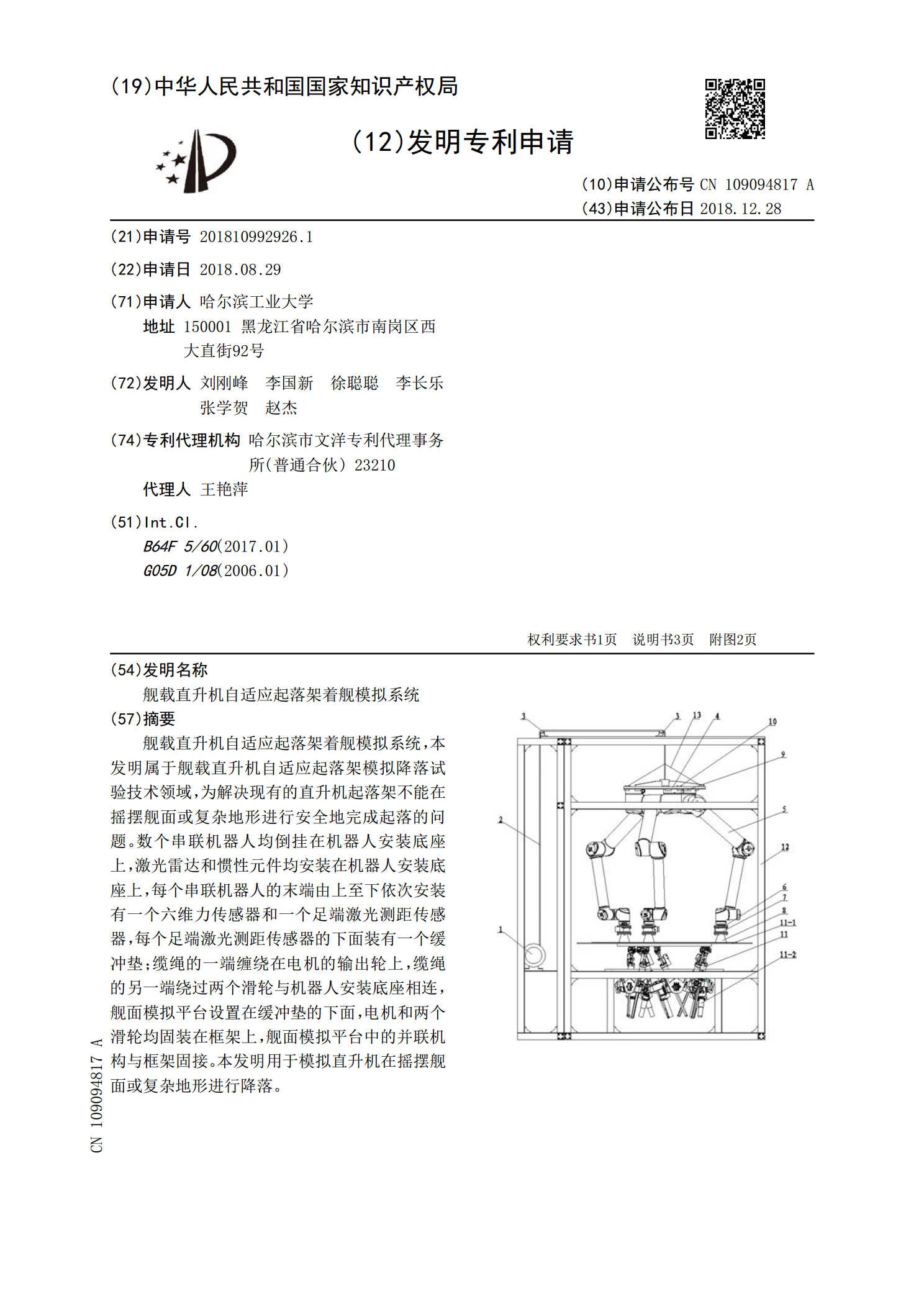
舰载直升机自适应起落架着舰模拟系统,本发明属于舰载直升机自适应起落架模拟降落试验技术领域,为解决现有的直升机起落架不能在摇摆舰面或复杂地形进行安全地完成起落的问题。数个串联机器人均倒挂在机器人安装底座上,激光雷达和惯性元件均安装在机器人安装底座上,每个串联机器人的末端由上至下依次安装有一个六维力传感器和一个足端激光测距传感器,每个足端激光测距传感器的下面装有一个缓冲垫;缆绳的一端缠绕在电机的输出轮上,缆绳的另一端绕过两个滑轮与机器人安装底座相连,舰面模拟平台设置在缓冲垫的下面,电机和两个滑轮均固装在框架上

基于MatlabGUI的舰载直升机单发着舰系统设计.docx
基于MatlabGUI的舰载直升机单发着舰系统设计论文标题:基于MatlabGUI的舰载直升机单发着舰系统设计摘要:舰载直升机单发着舰系统是舰载直升机进行舰载操作的关键系统之一。设计一个高效、可靠的单发着舰系统对于提高整体作战能力具有重要的作用。本论文基于MatlabGUI平台,针对舰载直升机单发着舰系统,进行了系统设计和优化,通过提高系统稳定性和精确度,最大化提升了直升机着舰操作的安全性和效率。实验结果表明,所设计的系统在实际应用中具有良好的性能和可靠性。关键词:舰载直升机,单发着舰系统,MatlabG

直升机起落架着陆载荷及参数影响分析.docx
直升机起落架着陆载荷及参数影响分析直升机起落架着陆载荷及参数影响分析直升机起落架是直升机的重要组成部分,其主要作用是承载直升机的整个重量及飞行引起的各种载荷,同时保障直升机在地面着陆时的平稳性和安全性。本论文将围绕直升机起落架在着陆时承受的载荷及相关参数的影响进行分析。一、着陆载荷1.1竖直载荷着陆时,直升机产生的竖直载荷包括重力、下降速度以及主旋翼下俯角所带来的气动力等。竖直载荷是导致起落架承受变形的主要载荷。为了保障直升机在着陆时不产生不必要的振动和损坏,起落架设计的竖直载荷容许值应与飞机的重量、下降
一种舰载直升机舰面共振建模方法.pdf
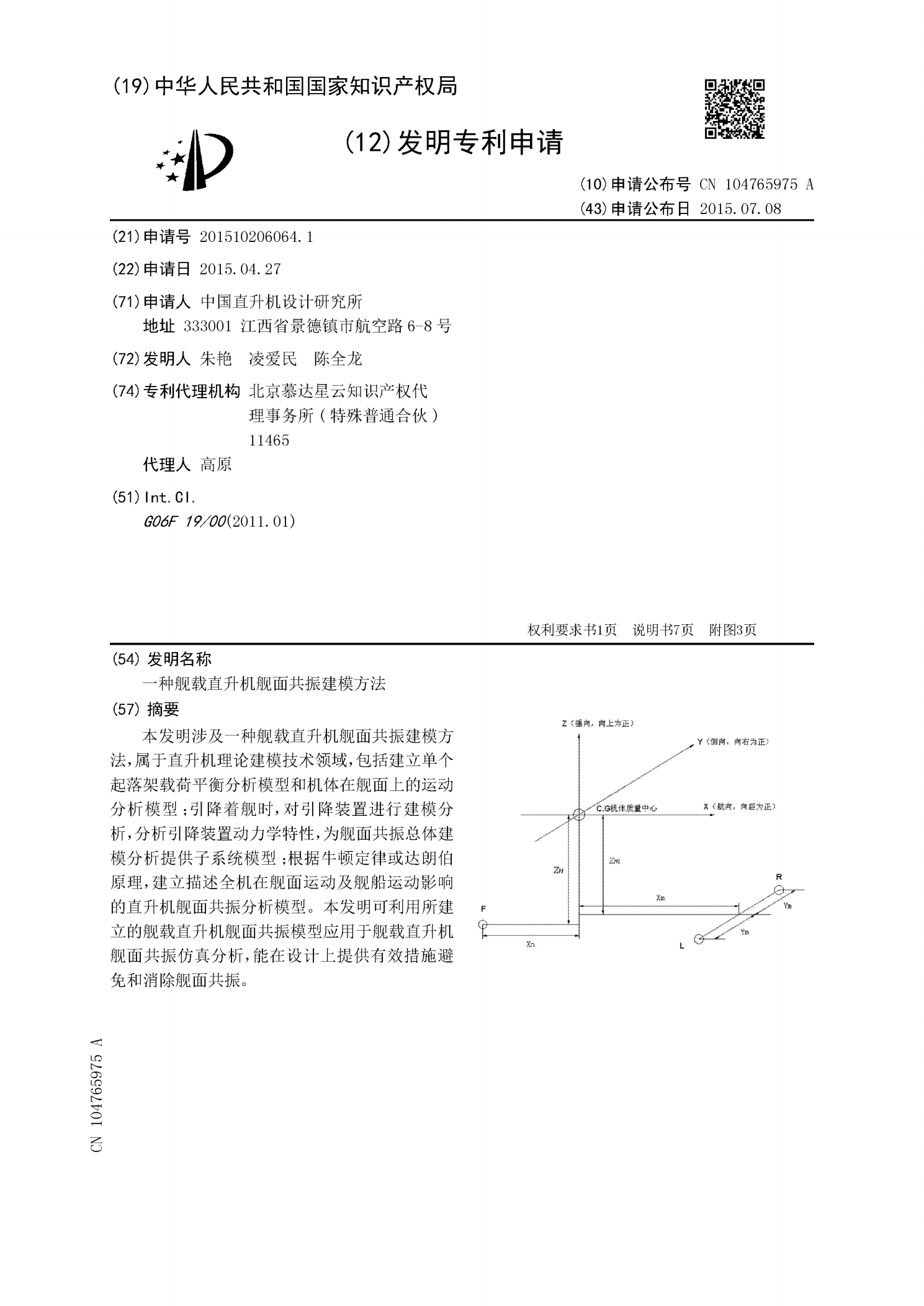
本发明涉及一种舰载直升机舰面共振建模方法,属于直升机理论建模技术领域,包括建立单个起落架载荷平衡分析模型和机体在舰面上的运动分析模型;引降着舰时,对引降装置进行建模分析,分析引降装置动力学特性,为舰面共振总体建模分析提供子系统模型;根据牛顿定律或达朗伯原理,建立描述全机在舰面运动及舰船运动影响的直升机舰面共振分析模型。本发明可利用所建立的舰载直升机舰面共振模型应用于舰载直升机舰面共振仿真分析,能在设计上提供有效措施避免和消除舰面共振。

舰载直升机“舰面共振”动力学分析.docx
舰载直升机“舰面共振”动力学分析舰载直升机(ShipborneHelicopter)在海上作战中扮演着重要角色,但舰面共振(Deck-InducedVibration)问题给其安全运行带来了挑战。舰面共振是指舰载直升机在起飞、降落过程中和舰艏区域产生的振动现象。本文将对舰面共振的动力学进行分析,并探讨相应的解决方案。首先,舰面共振的动力学分析需要考虑以下几个方面:舰载直升机的振动特性、舰艏结构的动力响应、飞行员操作对振动的影响以及环境条件对振动的影响。在舰载直升机的振动特性方面,需要分析其主旋翼和尾旋翼的