
一种去飞边装置.pdf

涵蓄****09

1/9

2/9
3/9
4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

去飞边夹具、去飞边装置及去飞边方法.pdf
本发明提供一种去除齿轮等工件上形成的飞边的去飞边夹具和去飞边装置及去飞边方法。该去飞边装置(1)具备:对具有齿轮形状的工件(20)的一端面进行旋转切削的第一刀片(131a)、在工件(20)的齿轮的一端面的棱线上及另一端面的棱线上啮合、同时可旋转地设置的第一齿轮(12a),利用所述第一刀片(131a)削去所旋转的工件的齿轮端面的飞边。

一种齿轮毛坯去飞边装置及去飞边方法.pdf
本发明公开了齿轮毛坯去飞边技术领域的一种齿轮毛坯去飞边装置,包括固定底座,固定底座上端固定连接有支撑台,支撑台上端固定连接有对称的伸缩柱,伸缩柱上端设有电机,电机动力轴端固定连接有转动杆,转动杆另一端固定连接有打磨刀,固定底座上端固定连接有工作台工作台上端设有挡板,挡板靠近打磨刀的一端固定连接有弹性夹板,本发明通过将齿轮毛坯固定于弹性夹板中,转动转动把手控制挡板位于打磨刀的位置,防止将齿轮的其他部位进行打磨,造成损失,本装置通过防护中和防尘板的设置,可有效的阻挡打磨毛边所产生的碎屑,防止其在空气中散开从而
一种去飞边装置.pdf
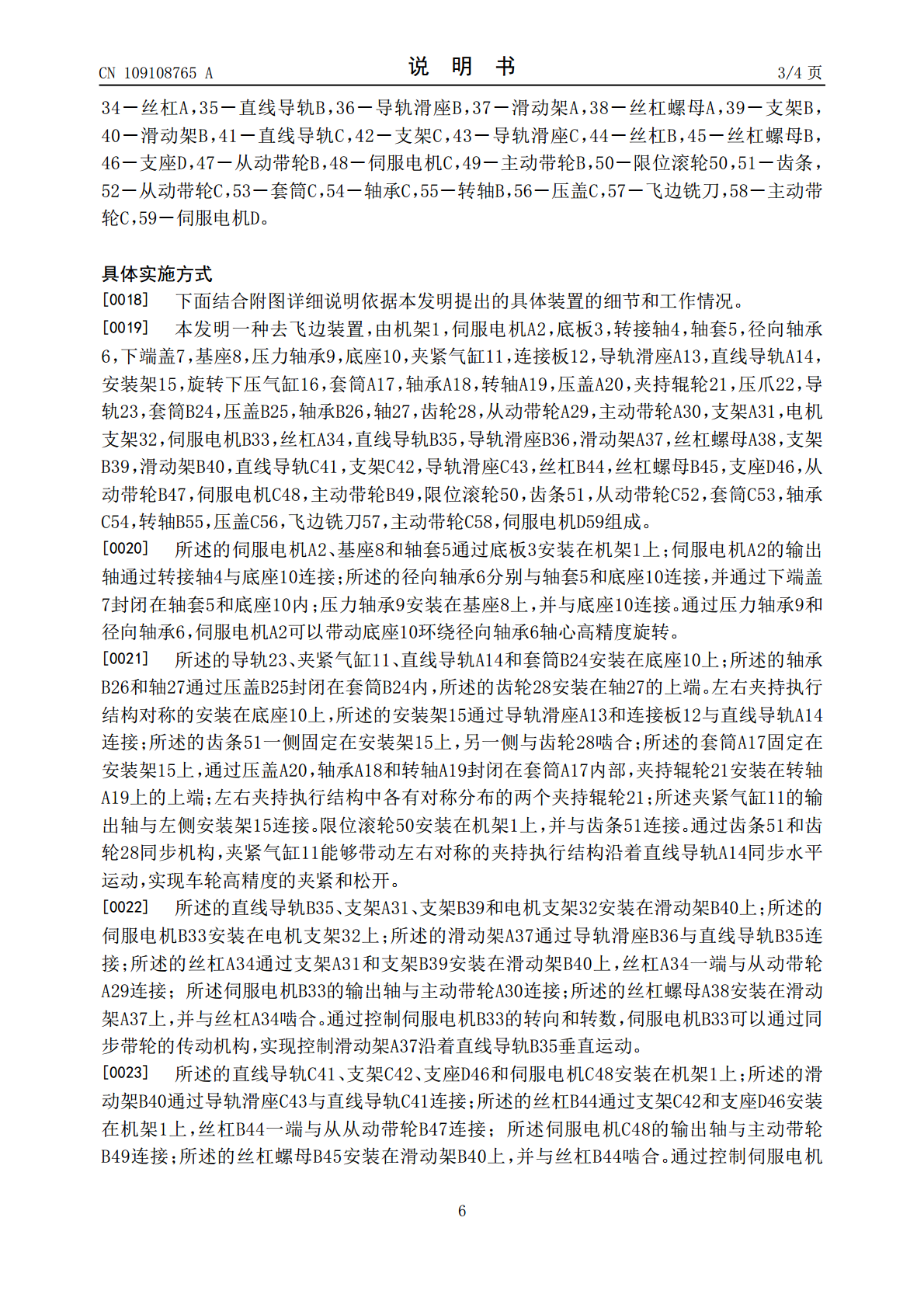
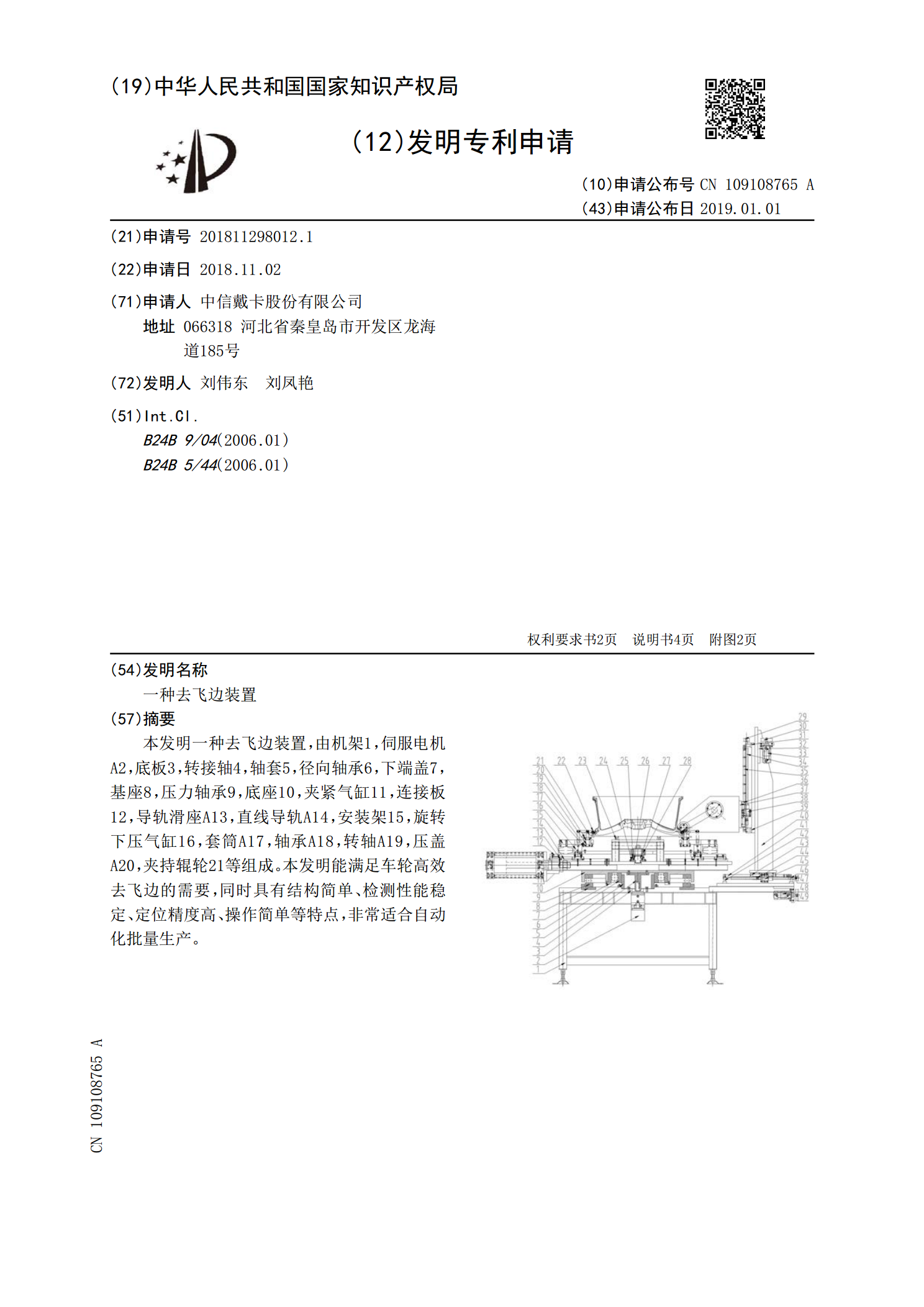
本发明一种去飞边装置,由机架1,伺服电机A2,底板3,转接轴4,轴套5,径向轴承6,下端盖7,基座8,压力轴承9,底座10,夹紧气缸11,连接板12,导轨滑座A13,直线导轨A14,安装架15,旋转下压气缸16,套筒A17,轴承A18,转轴A19,压盖A20,夹持辊轮21等组成。本发明能满足车轮高效去飞边的需要,同时具有结构简单、检测性能稳定、定位精度高、操作简单等特点,非常适合自动化批量生产。

一种车轮轮缘去飞边装置.pdf
本发明公开了一种车轮轮缘去飞边装置,由机架、气缸、电机、夹紧轴、V型块、齿条、托板、齿轮、刀、刀架、刀座等所组成,当生产线上的车轮到达四个夹紧轴的近似中间位置后,传感器使其停止运动,三轴气缸通过托板使其抬升到V型块的中间高度;夹紧气缸推动左滑台向中间运动,在齿轮齿条的作用下,右滑台也向中间运动,从而车轮毛坯在V型块中被同步夹紧并处于中心位置,电机通过链条带动左边两根夹紧轴转动,并通过摩擦力使车轮在夹紧状态下旋转;在进给气缸的作用下,使刀A和刀B都向前运动,当刀接触到轮缘时即形成相对切削运动,从而使轮缘飞边

一种车轮毛坯去飞边装置.pdf
本发明公开了一种车轮毛坯去飞边装置。由机架、底座、夹紧轴、电机、齿轮、齿条、气缸、刀具等组成。当车轮到达四个夹紧轴的近似中心位置,抬升装置使毛坯轮抬升到V型块的中间高度。夹紧气缸推动夹紧轴底座,毛坯轮在V型块中被同步夹紧并处于中心位置,电机驱动两个夹紧轴转动带动毛坯轮旋转;通过安装在两个夹紧轴中间的刀具的进给运动,使毛坯轮与刀具形成相对运动实现去飞边功能。本发明可以适用于各种尺寸大小不同的车轮,在使用中整个过程完全是自动化,效果理想。