
基于视觉的木制机器人.pdf

俊英****22

1/7
2/7

3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于视觉的木制机器人.pdf
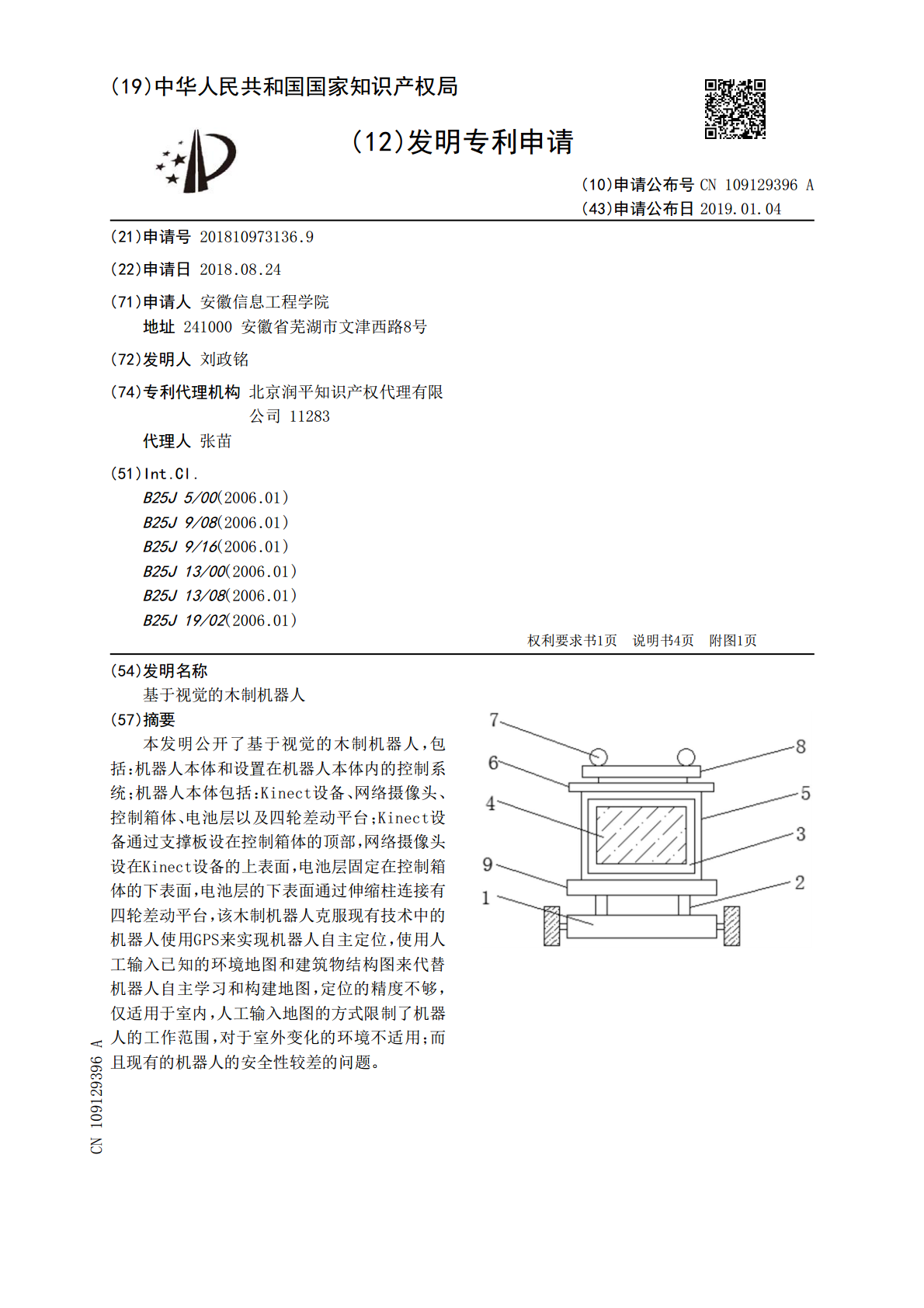
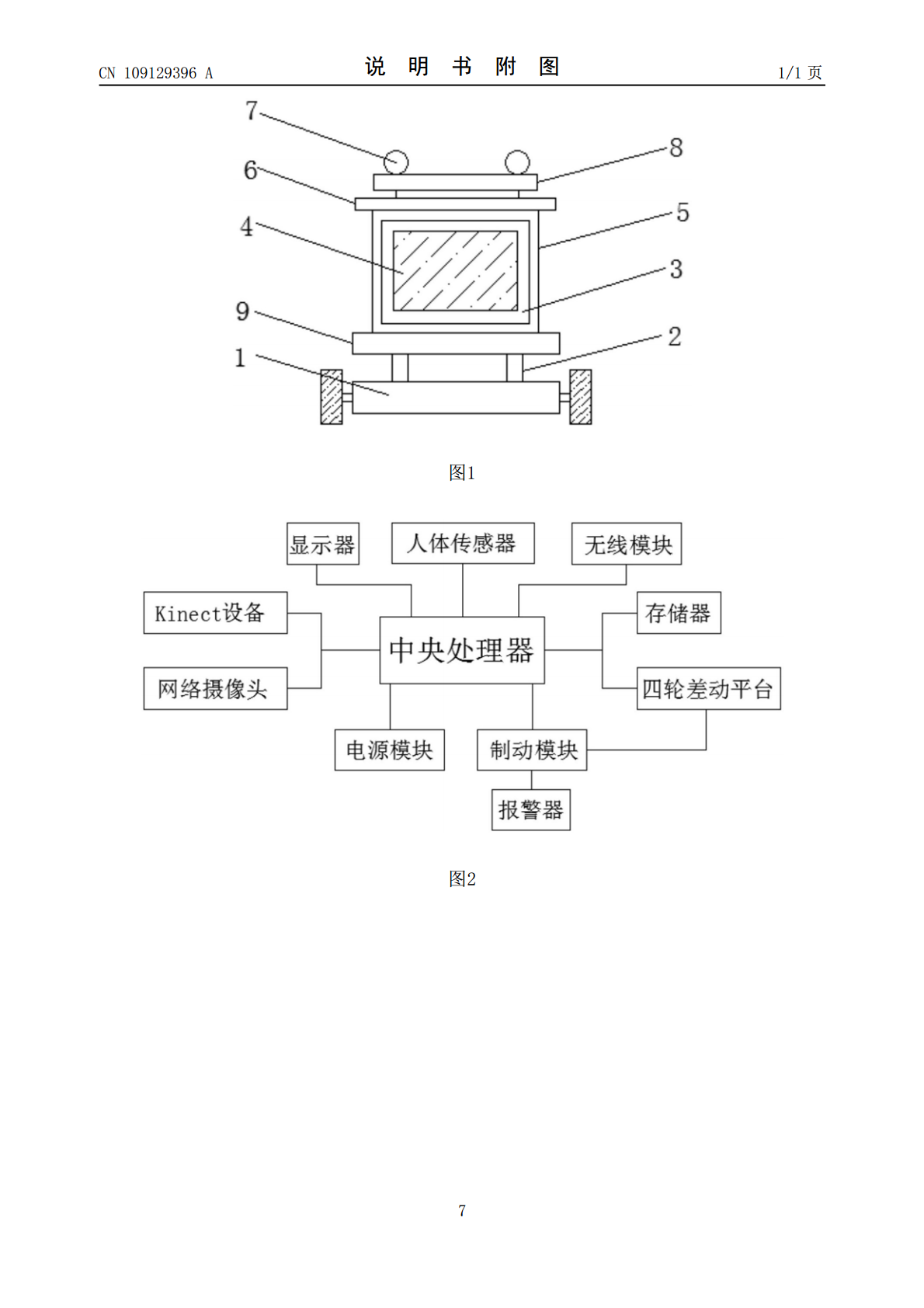
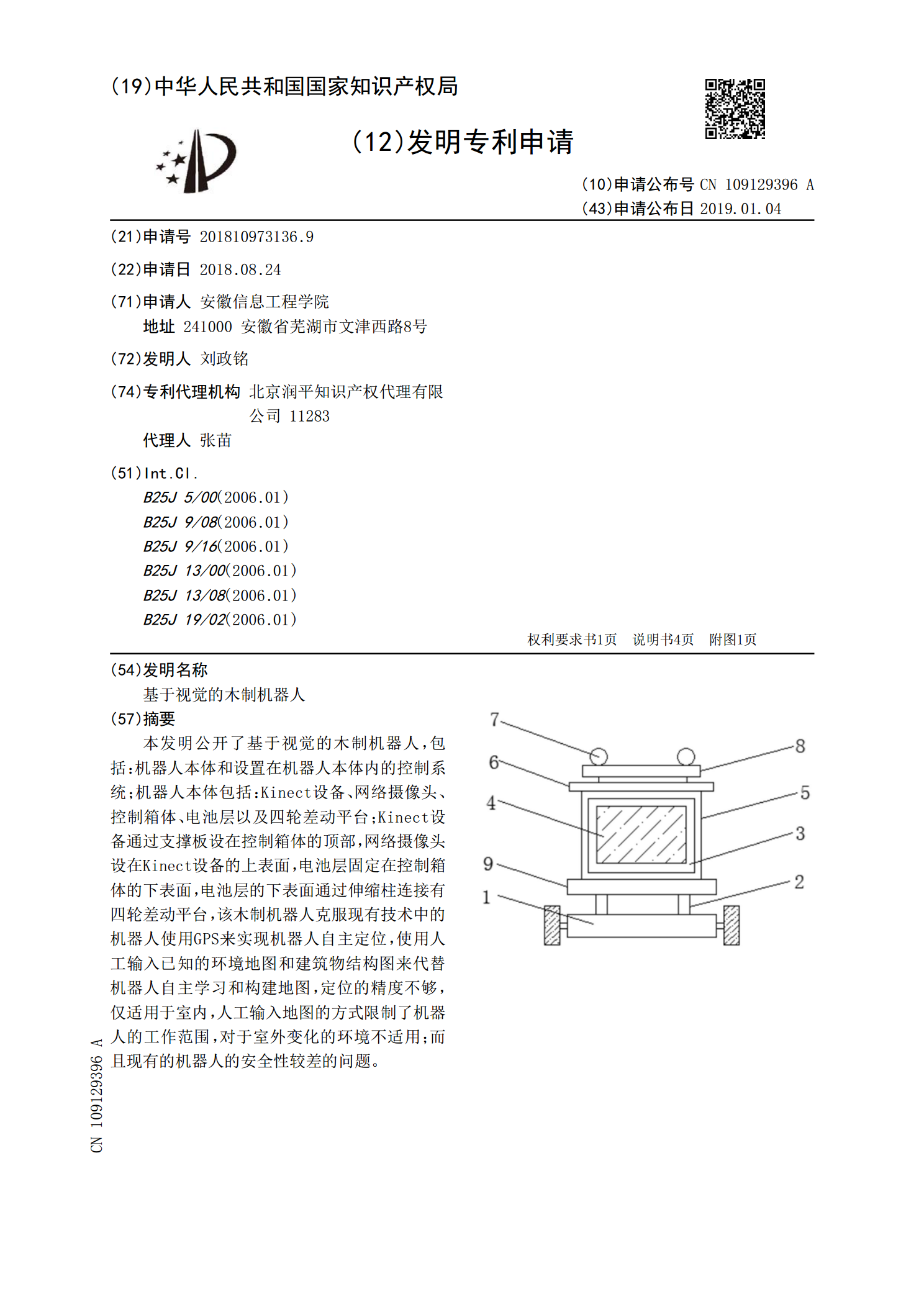
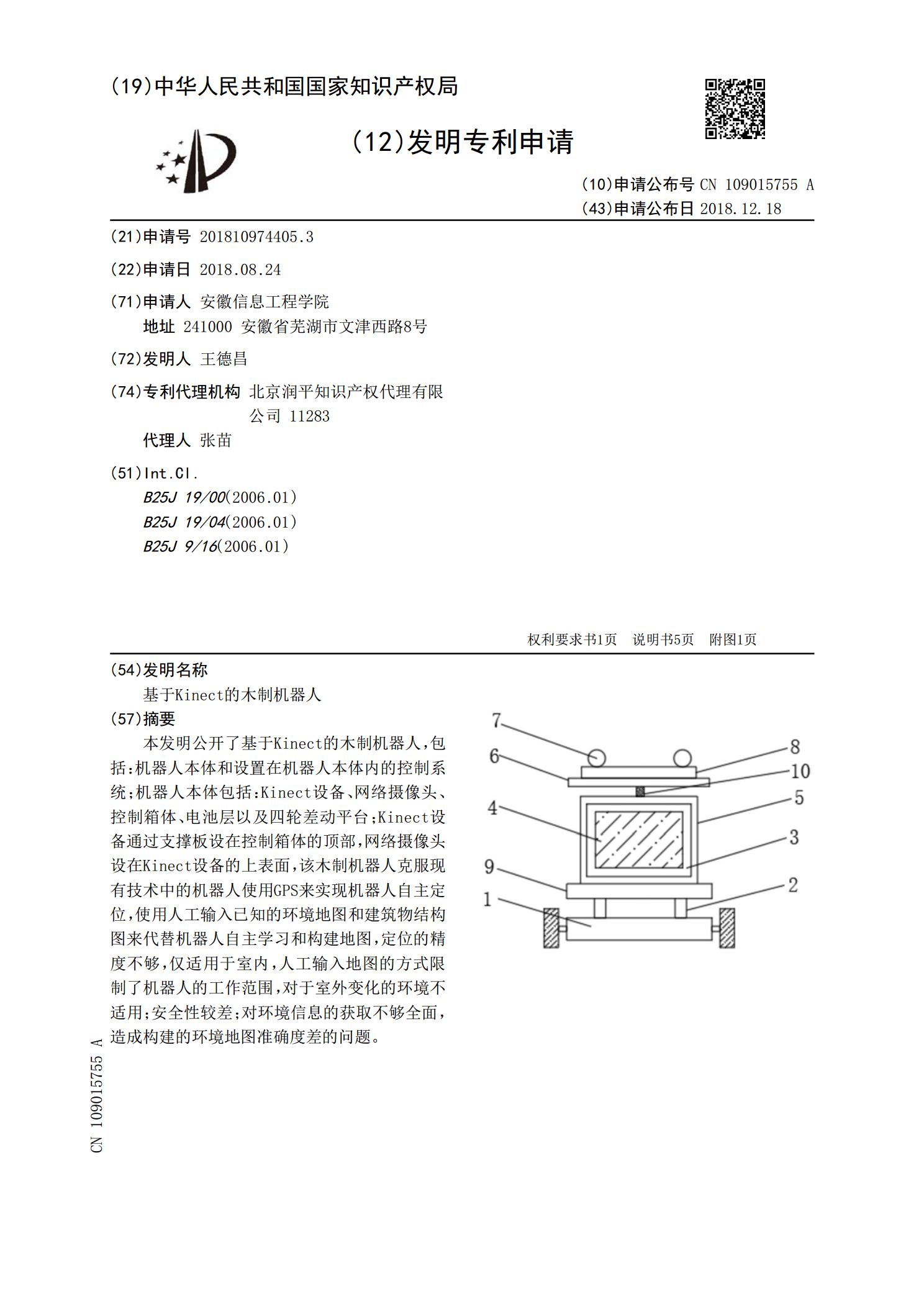
本发明公开了基于视觉的木制机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,该木制机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,定位的精度不够,仅适用于室内,人工输入地图的方式限
基于Kinect的木制机器人.pdf
本发明公开了基于Kinect的木制机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,该木制机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用;安全性较差;对环境
基于视觉的智能机器人.pdf
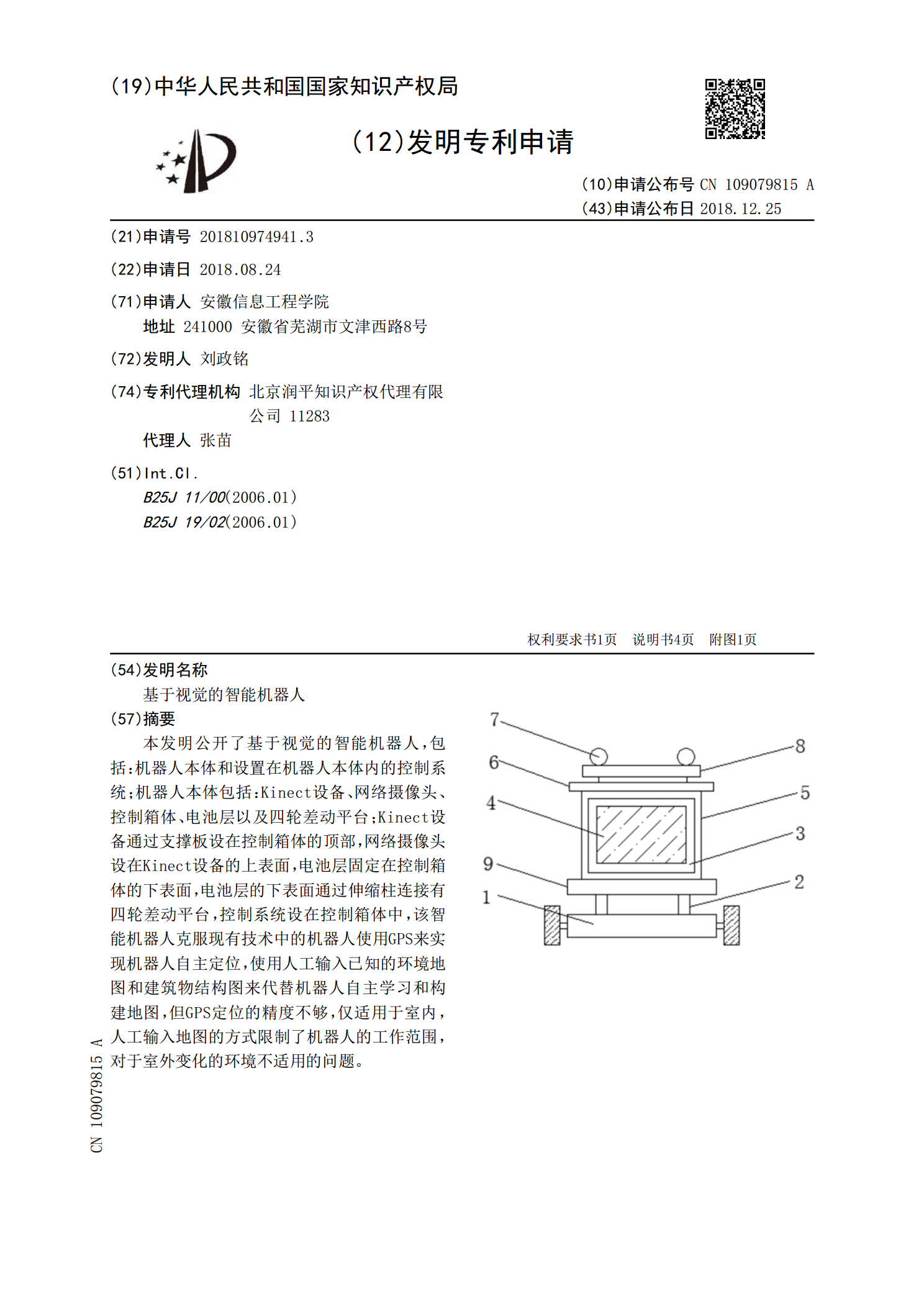
本发明公开了基于视觉的智能机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,控制系统设在控制箱体中,该智能机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,但GPS定位的精度不够,仅

基于视觉机器人的验布机.pdf
基于视觉机器人的验布机,包括两个固定安装在地面上的第一带轮,两个第一带轮之间通过第一皮带连接,第一皮带的前方和后方分别设有第一支架,第一支架均固定安装在地面上,第一支架之间设有两个相互平行的第一转轴,第一皮带从第一转轴之间穿过,第一转轴的前后两端分别通过轴承连接对应的第一支架,第一转轴的外周分别固定安装齿轮,齿轮分别与对应的第一转轴的中心线共线,两个齿轮相互啮合,下方的第一转轴的外周固定安装传动辊。本发明工作时,布料每向前运行一段距离,视觉机器人图像采集装置采集一次图像,由此完成布料的无遗漏图像采集,且结

基于视觉的智能针灸机器人.pdf
本发明提供基于视觉的智能针灸机器人,属于针灸机器人技术领域,以解决现有的智能针灸机器人需要人工辅助操作完成,不能完成自主拔针操作,从而降低了智能针灸机器人的实用性的问题,包括:床体;所述床体后侧通过支架安装有针灸机器人主体,且针灸机器人主体右端面安装有控制箱,并且控制箱与针灸机器人主体为普通电性连接。本发明通过图像获取装置、计算机控制箱的配合,针灸针滞留时间结束后,针灸机器人主体通过末端夹持机构和捻转机构完成自主拔针操作,拔针的方向、角度和速度都与刺入针灸针时保持一致,且整个拔针过程,由于无需人工辅助操作