
一种用于对卫星的旋转体进行消旋控制的方法及相应消旋装置.pdf

是飞****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于对卫星的旋转体进行消旋控制的方法及相应消旋装置.pdf
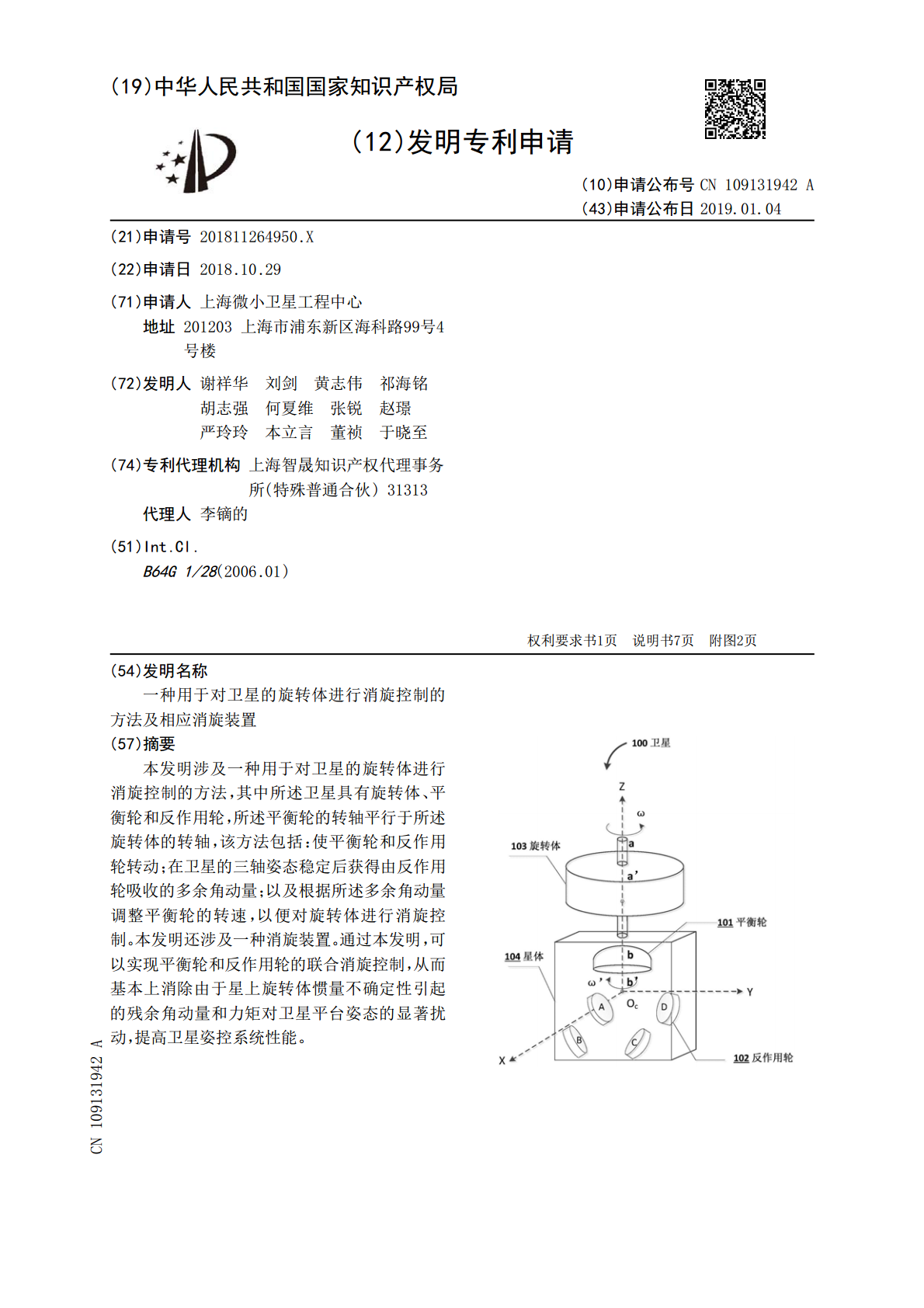
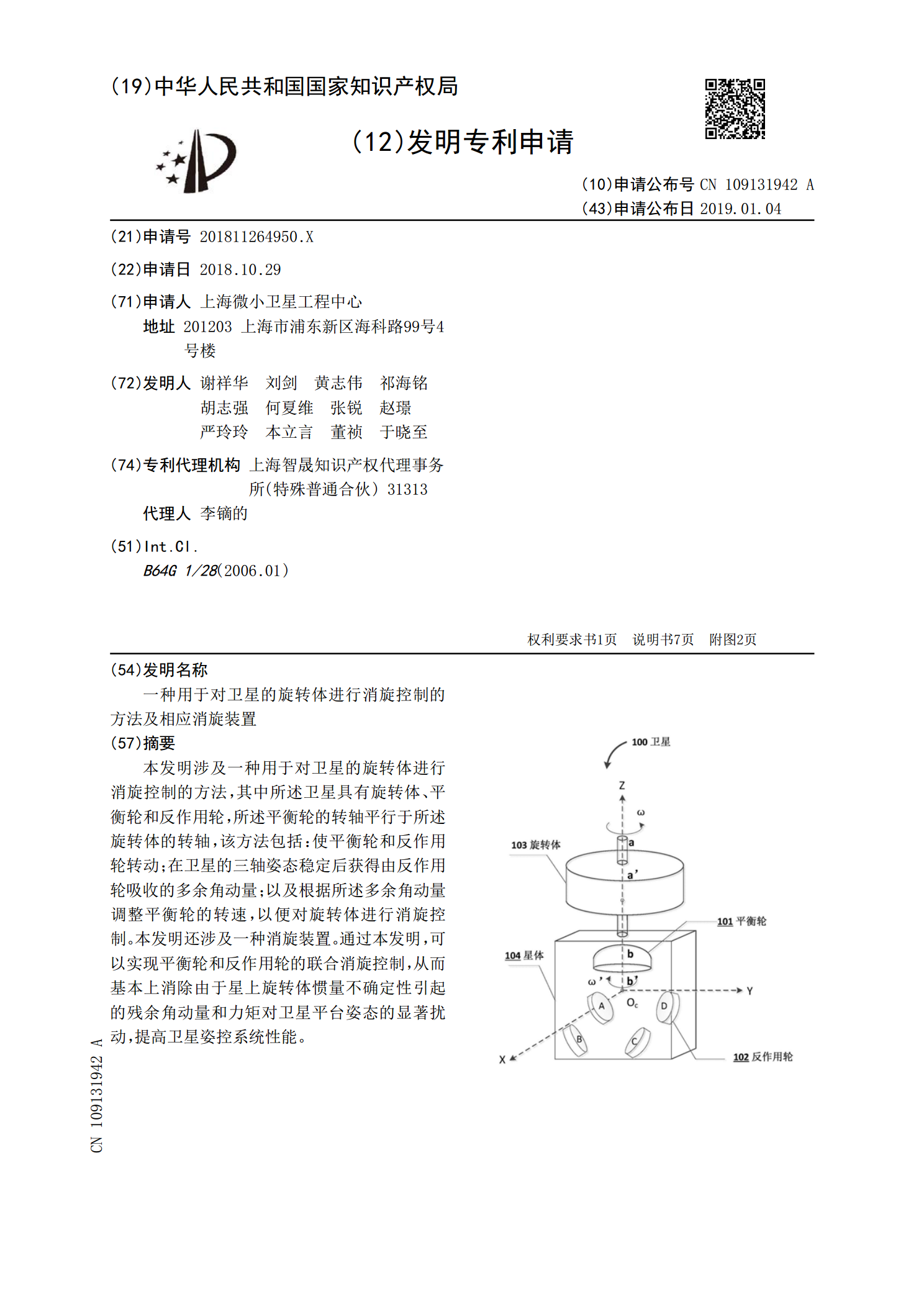
本发明涉及一种用于对卫星的旋转体进行消旋控制的方法,其中所述卫星具有旋转体、平衡轮和反作用轮,所述平衡轮的转轴平行于所述旋转体的转轴,该方法包括:使平衡轮和反作用轮转动;在卫星的三轴姿态稳定后获得由反作用轮吸收的多余角动量;以及根据所述多余角动量调整平衡轮的转速,以便对旋转体进行消旋控制。本发明还涉及一种消旋装置。通过本发明,可以实现平衡轮和反作用轮的联合消旋控制,从而基本上消除由于星上旋转体惯量不确定性引起的残余角动量和力矩对卫星平台姿态的显著扰动,提高卫星姿控系统性能。
卫星动量轮在轨姿态无偏差起旋和消旋的控制方法.pdf
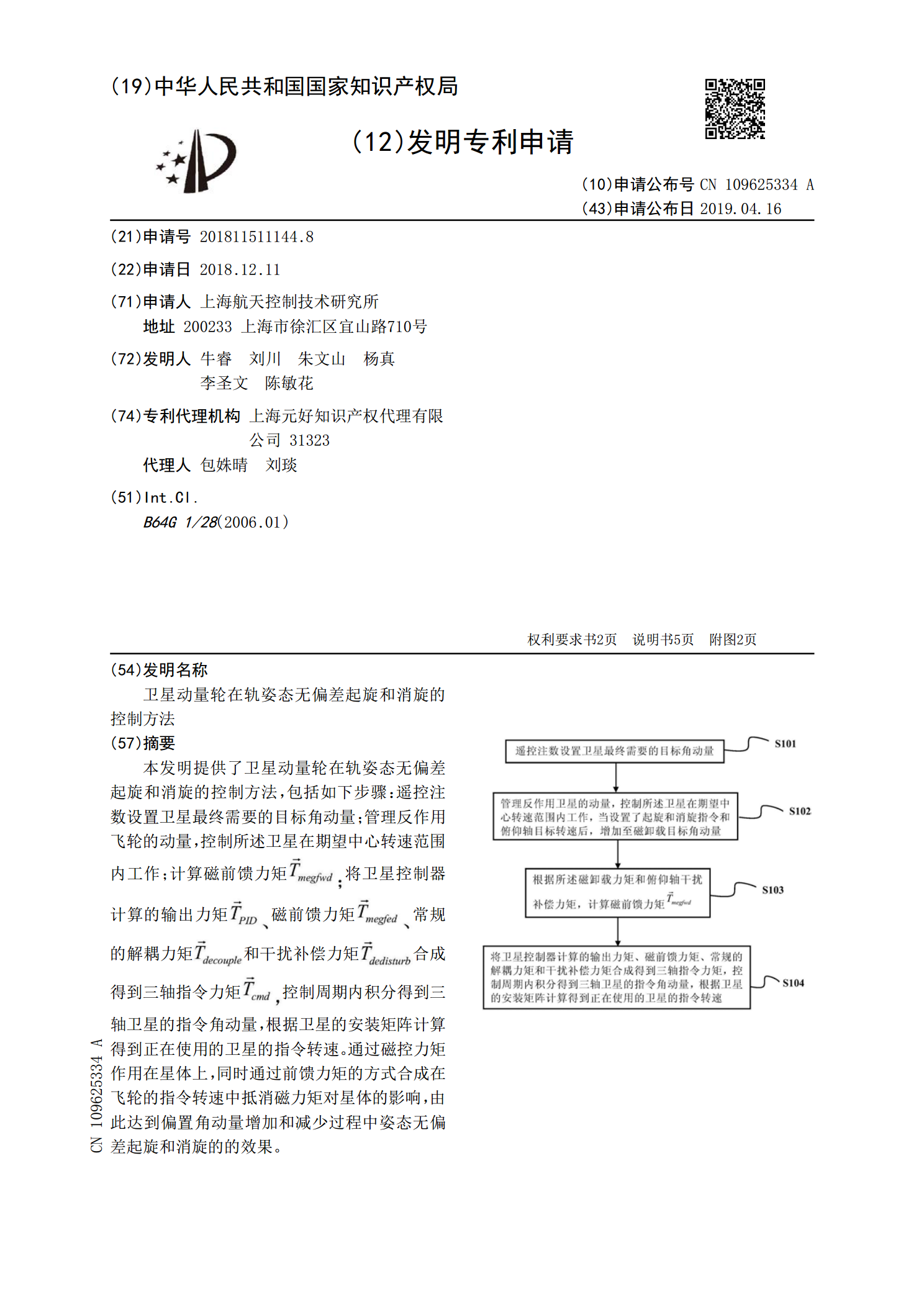
本发明提供了卫星动量轮在轨姿态无偏差起旋和消旋的控制方法,包括如下步骤:遥控注数设置卫星最终需要的目标角动量;管理反作用飞轮的动量,控制所述卫星在期望中心转速范围内工作;计算磁前馈力矩

一种适用于旋流泵进口段的消旋装置.pdf
本发明公开了一种适用于旋流泵进口段的消旋装置,包括筒壁,在筒壁内侧等间距设置若干组导轨叶片,从所述筒壁的进口至出口,每组中的导轨叶片沿周向均匀布置,相邻组导轨叶片之间相互错开;且所有导轨叶片的进口安放角相同,筒壁两端设有法兰用于与旋流泵配合安装,本发明所设计的消旋装置能够引导因受预旋流影响而滞留在进口段中的介质顺利进入泵内,减少进口管中固体过量堆积带来的堵塞风险,增强旋流泵的输送能力。

微小卫星姿态消旋稳定算法研究.docx
微小卫星姿态消旋稳定算法研究微小卫星姿态消旋稳定算法研究摘要:微小卫星是一种小型化的卫星,它的重要特点是轻质化和小型化,这样可以提高卫星的飞行性能和载荷效能。然而,由于微小卫星的小质量和尺寸,其姿态控制和稳定成为一个挑战。本文研究了微小卫星的姿态消旋稳定算法,并提出了一种能够解决这一问题的理论模型。关键词:微小卫星,姿态消旋,稳定算法,姿态控制1.引言随着科技的发展,卫星在地球观测、通信和导航领域发挥着越来越重要的作用。传统的大型卫星在发展中也面临着一些挑战,如成本高、周期长等。微小卫星由于其轻质和小型的

微小卫星姿态消旋稳定算法研究.docx
微小卫星姿态消旋稳定算法研究摘要微小卫星作为航天技术的新兴分支,具有小型化、灵活性和廉价等优点,受到了广泛的关注和研究。姿态控制是微小卫星任务实现的关键技术之一,本文研究了微小卫星姿态消旋稳定算法,主要探讨了传统姿态稳定控制与消旋控制的结合应用,提出了一种基于姿态角速度反解的一种新型算法,并进行了仿真验证。结果表明,该算法具有较高的稳定性和精度,能够为微小卫星的姿态控制提供较好的保障。关键词:微小卫星,姿态控制,消旋,算法1.引言微小卫星是航天技术的新兴分支,其主要特点是小型化、灵活性和廉价等优点。由于其