
卫星动量轮在轨姿态无偏差起旋和消旋的控制方法.pdf

猫巷****永安

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
卫星动量轮在轨姿态无偏差起旋和消旋的控制方法.pdf
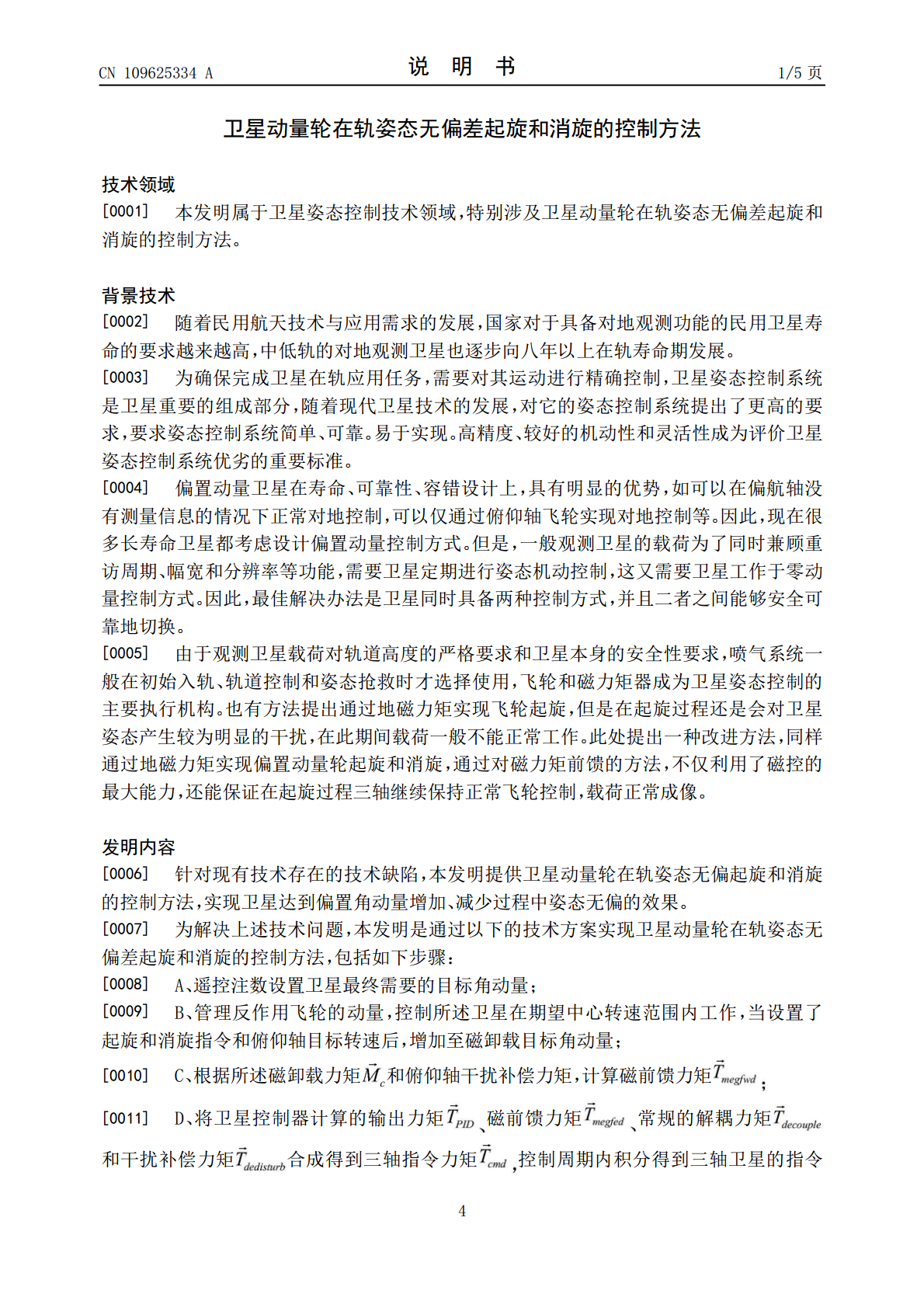
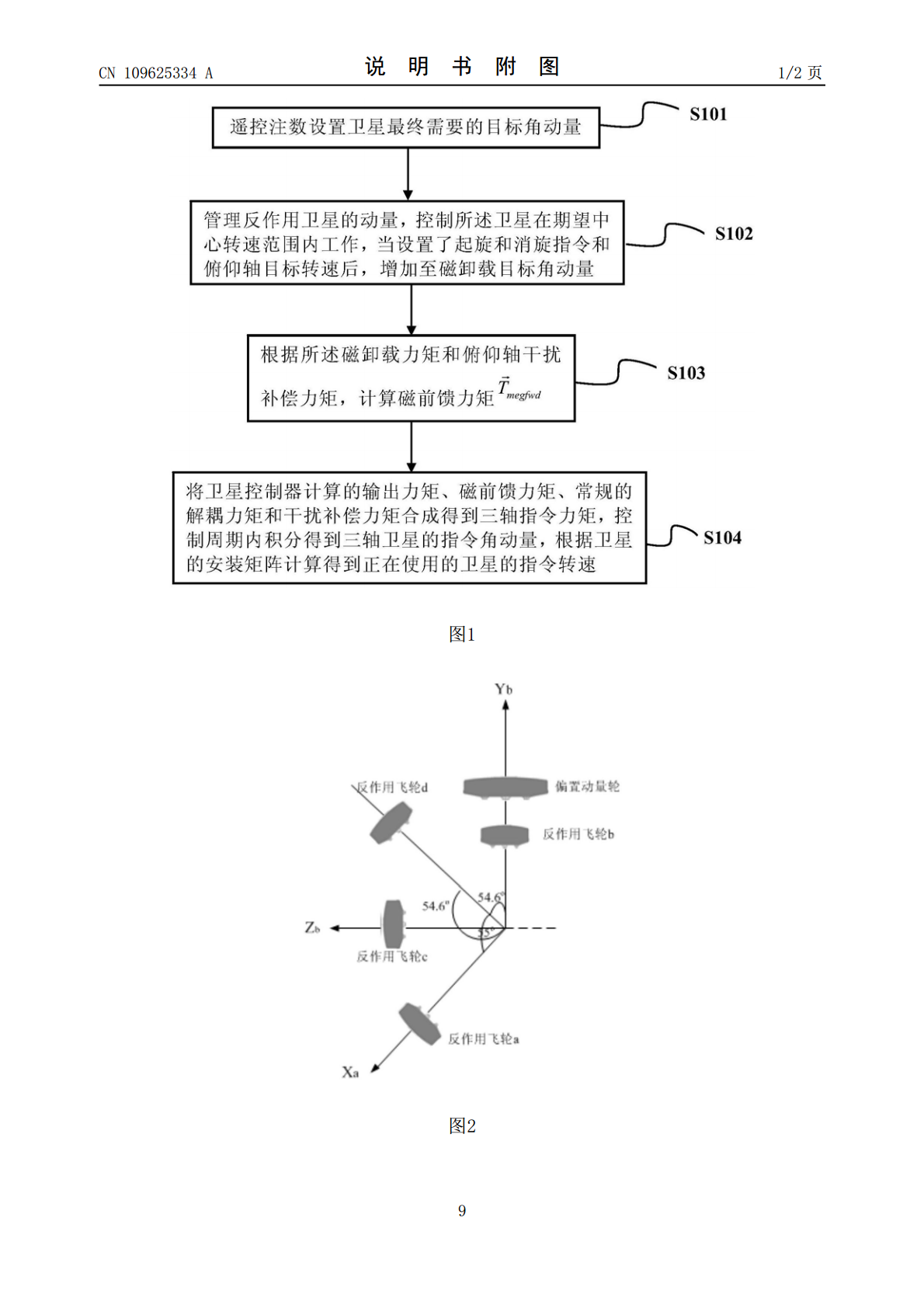
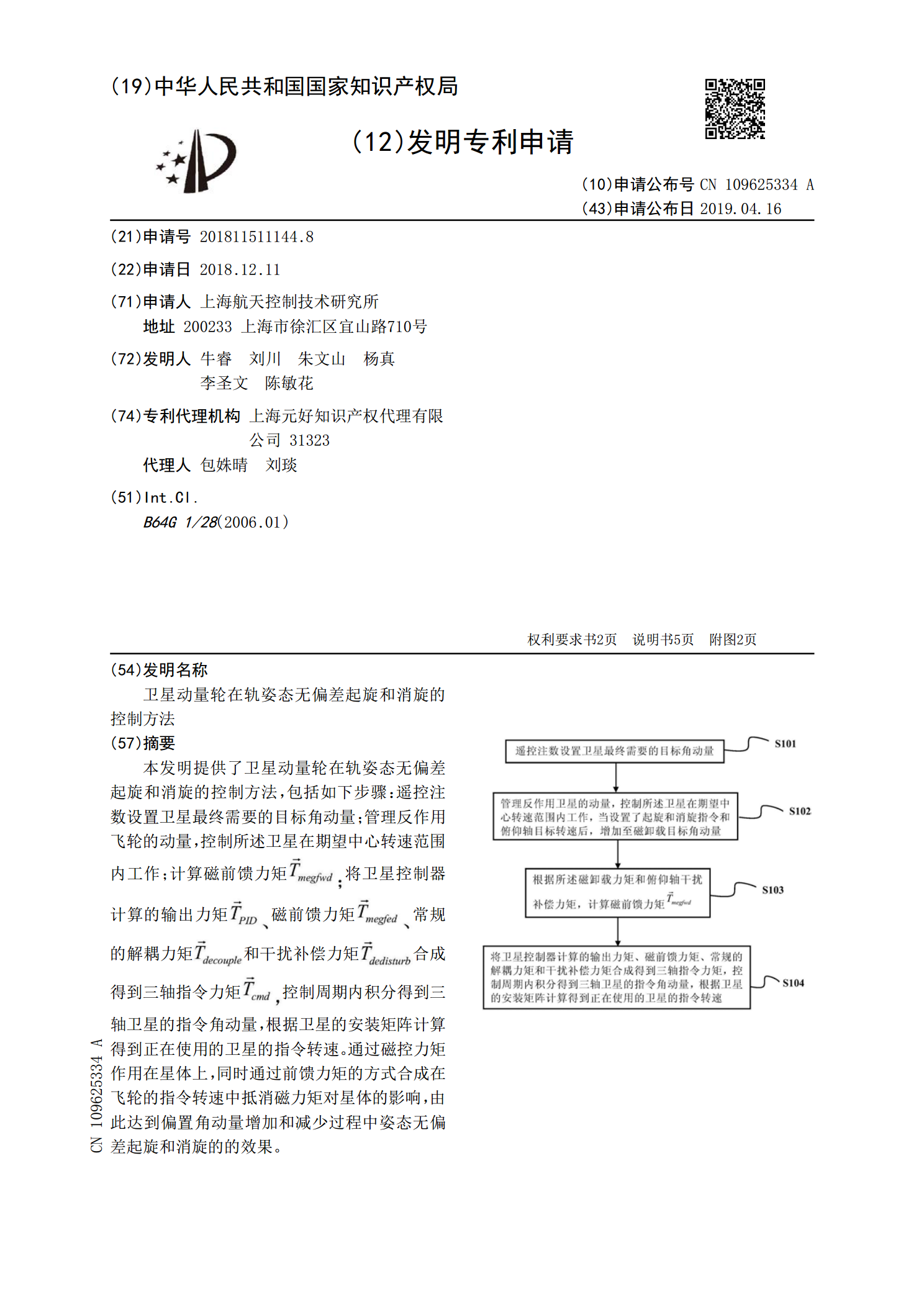
本发明提供了卫星动量轮在轨姿态无偏差起旋和消旋的控制方法,包括如下步骤:遥控注数设置卫星最终需要的目标角动量;管理反作用飞轮的动量,控制所述卫星在期望中心转速范围内工作;计算磁前馈力矩

微小卫星姿态消旋稳定算法研究.docx
微小卫星姿态消旋稳定算法研究微小卫星姿态消旋稳定算法研究摘要:微小卫星是一种小型化的卫星,它的重要特点是轻质化和小型化,这样可以提高卫星的飞行性能和载荷效能。然而,由于微小卫星的小质量和尺寸,其姿态控制和稳定成为一个挑战。本文研究了微小卫星的姿态消旋稳定算法,并提出了一种能够解决这一问题的理论模型。关键词:微小卫星,姿态消旋,稳定算法,姿态控制1.引言随着科技的发展,卫星在地球观测、通信和导航领域发挥着越来越重要的作用。传统的大型卫星在发展中也面临着一些挑战,如成本高、周期长等。微小卫星由于其轻质和小型的

微小卫星姿态消旋稳定算法研究.docx
微小卫星姿态消旋稳定算法研究摘要微小卫星作为航天技术的新兴分支,具有小型化、灵活性和廉价等优点,受到了广泛的关注和研究。姿态控制是微小卫星任务实现的关键技术之一,本文研究了微小卫星姿态消旋稳定算法,主要探讨了传统姿态稳定控制与消旋控制的结合应用,提出了一种基于姿态角速度反解的一种新型算法,并进行了仿真验证。结果表明,该算法具有较高的稳定性和精度,能够为微小卫星的姿态控制提供较好的保障。关键词:微小卫星,姿态控制,消旋,算法1.引言微小卫星是航天技术的新兴分支,其主要特点是小型化、灵活性和廉价等优点。由于其
一种用于对卫星的旋转体进行消旋控制的方法及相应消旋装置.pdf
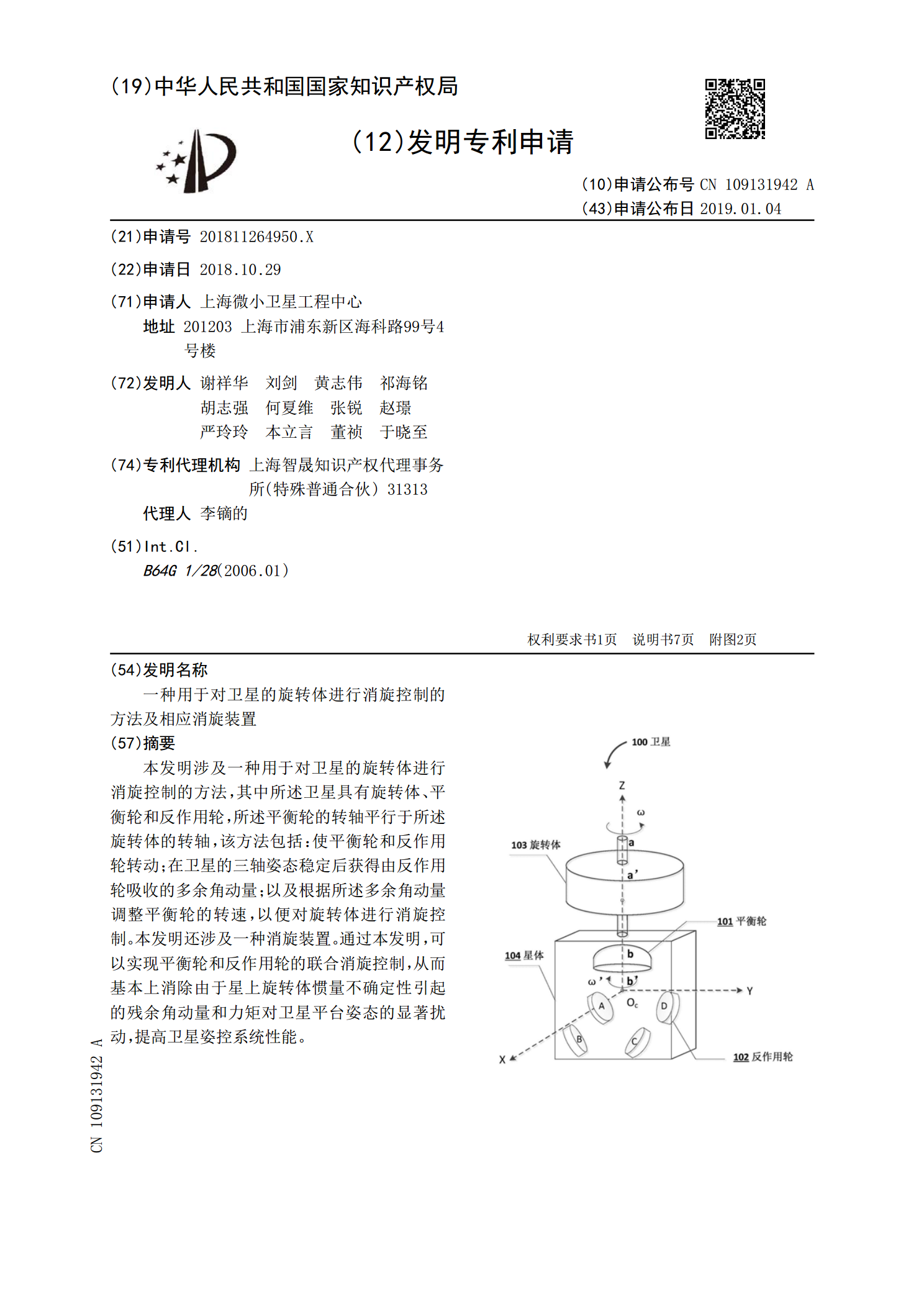
本发明涉及一种用于对卫星的旋转体进行消旋控制的方法,其中所述卫星具有旋转体、平衡轮和反作用轮,所述平衡轮的转轴平行于所述旋转体的转轴,该方法包括:使平衡轮和反作用轮转动;在卫星的三轴姿态稳定后获得由反作用轮吸收的多余角动量;以及根据所述多余角动量调整平衡轮的转速,以便对旋转体进行消旋控制。本发明还涉及一种消旋装置。通过本发明,可以实现平衡轮和反作用轮的联合消旋控制,从而基本上消除由于星上旋转体惯量不确定性引起的残余角动量和力矩对卫星平台姿态的显著扰动,提高卫星姿控系统性能。

基于动量轮的卫星姿态控制算法研究.docx
基于动量轮的卫星姿态控制算法研究基于动量轮的卫星姿态控制算法研究摘要:卫星姿态控制是保障卫星安全稳定运行的重要技术之一,而动量轮是航天器最常用的姿态控制器之一。本文介绍了动量轮的基本原理和传统的姿态控制算法,并分析了其中存在的问题。随后,本文介绍了几种常见的基于动量轮的姿态控制算法,包括完整的PID控制算法、自适应控制算法和模糊控制算法等,并对它们的优缺点进行了分析比较。最后,本文介绍了一些最新的进展和趋势,展望了未来动量轮在卫星姿态控制中的应用前景。一、引言卫星姿态控制是指在航天器运行时,通过向航天器姿