
一种可旋转的夹紧机构.pdf

东耀****哥哥

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可旋转的夹紧机构.pdf
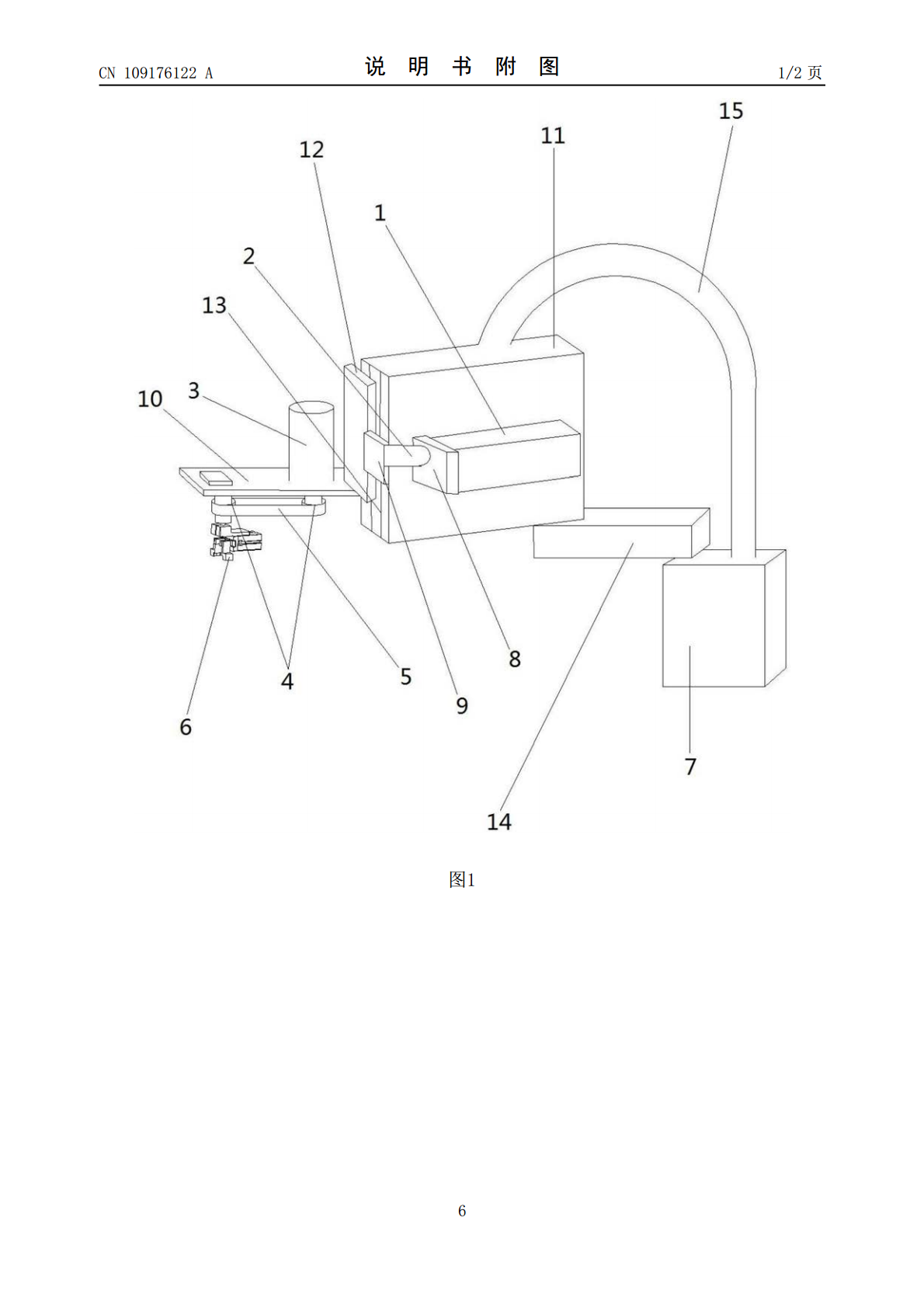
本发明公开了一种可旋转的夹紧机构,包括第一电机,所述第一电机的一端通过第一法兰盘与减速机水平连接,所述减速机的另一端通过第二法兰盘与第三法兰盘水平连接,所述第三法兰盘上设置有第二电机,所述第二电机固定在第三法兰盘上并穿过所述第三法兰盘,且所述第二电机穿过第三法兰盘的一端设置有同步轮;所述第三法兰盘远离第二电机的一端上还设置有另一个同步轮,该同步轮连接有抓手,所述两个同步轮平行间隔设置;所述同步轮上还设置有皮带;所述第一电机和减速机位于电机室中;还包括三轴机器人,三轴机器人通过软管与电机室顶部连接,三轴机器
一种轮胎安装用可旋转夹紧机构.pdf
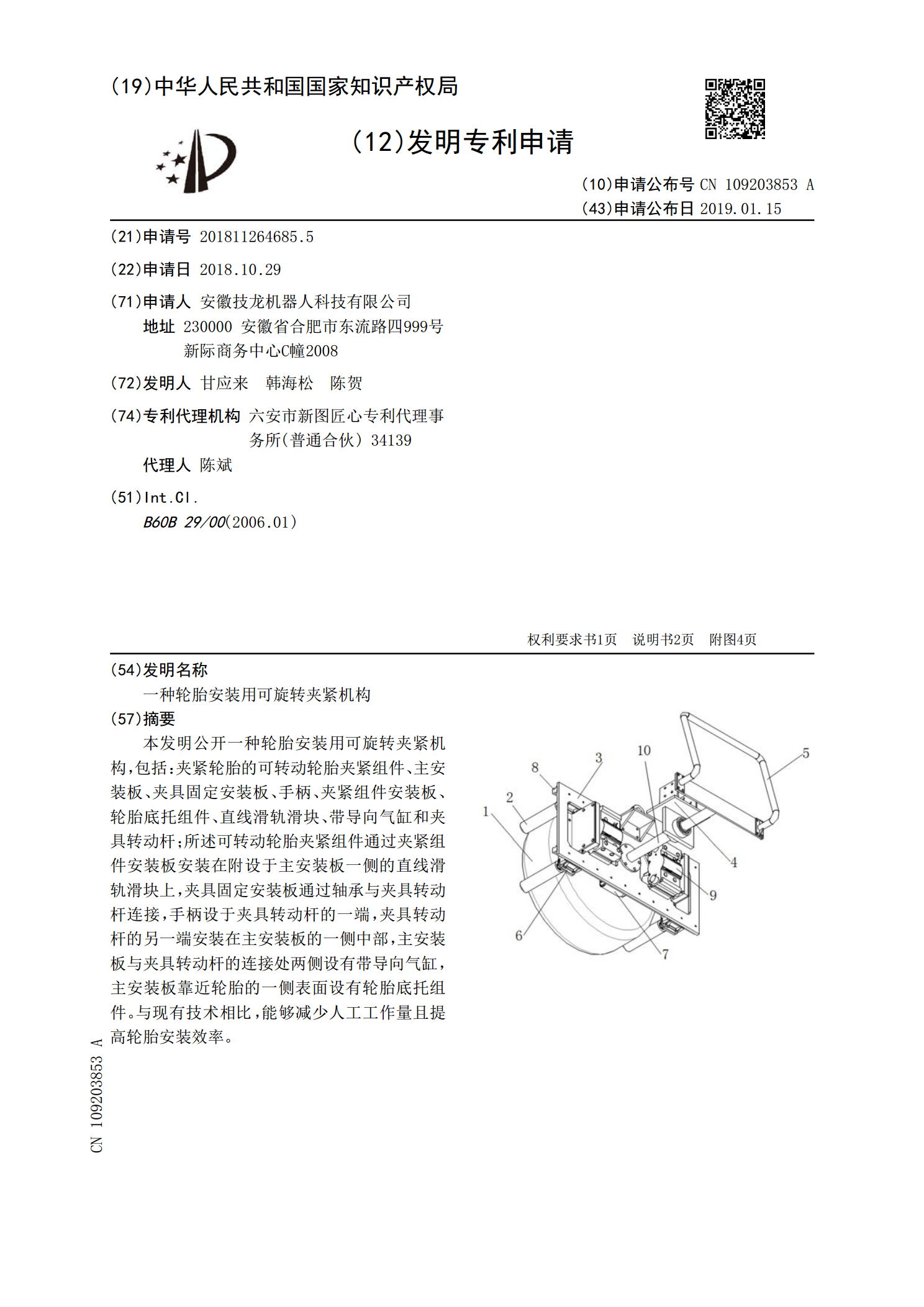
本发明公开一种轮胎安装用可旋转夹紧机构,包括:夹紧轮胎的可转动轮胎夹紧组件、主安装板、夹具固定安装板、手柄、夹紧组件安装板、轮胎底托组件、直线滑轨滑块、带导向气缸和夹具转动杆;所述可转动轮胎夹紧组件通过夹紧组件安装板安装在附设于主安装板一侧的直线滑轨滑块上,夹具固定安装板通过轴承与夹具转动杆连接,手柄设于夹具转动杆的一端,夹具转动杆的另一端安装在主安装板的一侧中部,主安装板与夹具转动杆的连接处两侧设有带导向气缸,主安装板靠近轮胎的一侧表面设有轮胎底托组件。与现有技术相比,能够减少人工工作量且提高轮胎安装效

一种可持续被动旋转的气动夹紧机构.pdf
本发明涉及一种气动夹紧机构,具体的说是一种可持续被动旋转的气动夹紧机构,属于气动夹紧设备技术领域。其包括活动夹板、固定夹板、压紧气缸、气缸支座、旋转基座、减速电机、减速电机座、旋转主轴、供气头基座、支撑架和供气管,供气接头包括供气头旋转体和供气头固定体,供气头旋转体转动连接在供气头固定体上,供气头固定体固定在支撑架上,供气头固定体进气孔上连接气源,供气头旋转体出气口上连接供气管,供气管连接压紧气缸进气口。本发明结构简单、紧凑、合理,工作稳定可靠,能使该被动旋转体在旋转的同时能始终气动夹持住某一个工件,以满
一种旋转夹紧机构.pdf
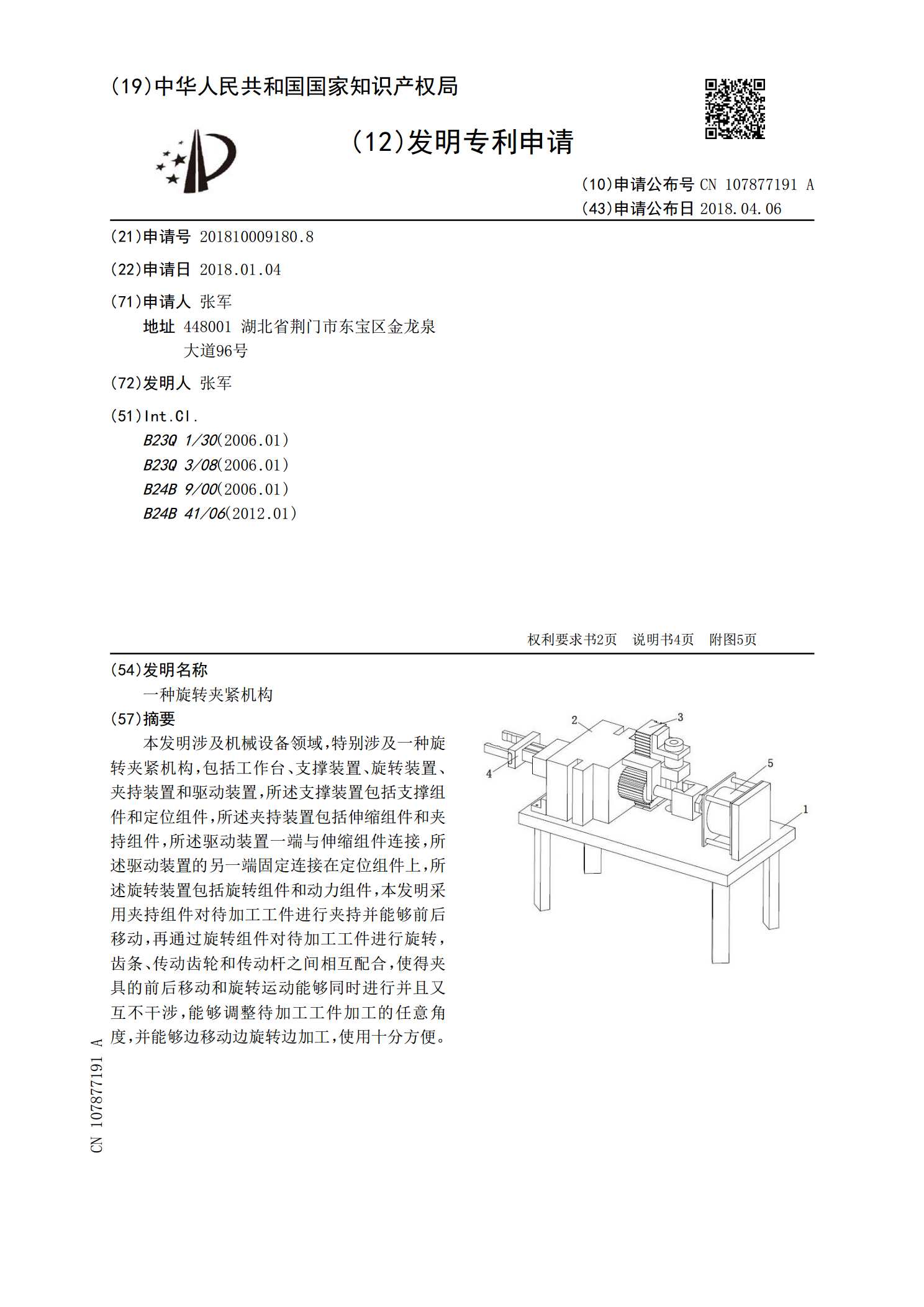
本发明涉及机械设备领域,特别涉及一种旋转夹紧机构,包括工作台、支撑装置、旋转装置、夹持装置和驱动装置,所述支撑装置包括支撑组件和定位组件,所述夹持装置包括伸缩组件和夹持组件,所述驱动装置一端与伸缩组件连接,所述驱动装置的另一端固定连接在定位组件上,所述旋转装置包括旋转组件和动力组件,本发明采用夹持组件对待加工工件进行夹持并能够前后移动,再通过旋转组件对待加工工件进行旋转,齿条、传动齿轮和传动杆之间相互配合,使得夹具的前后移动和旋转运动能够同时进行并且又互不干涉,能够调整待加工工件加工的任意角度,并能够边移
一种旋转夹紧机构.pdf
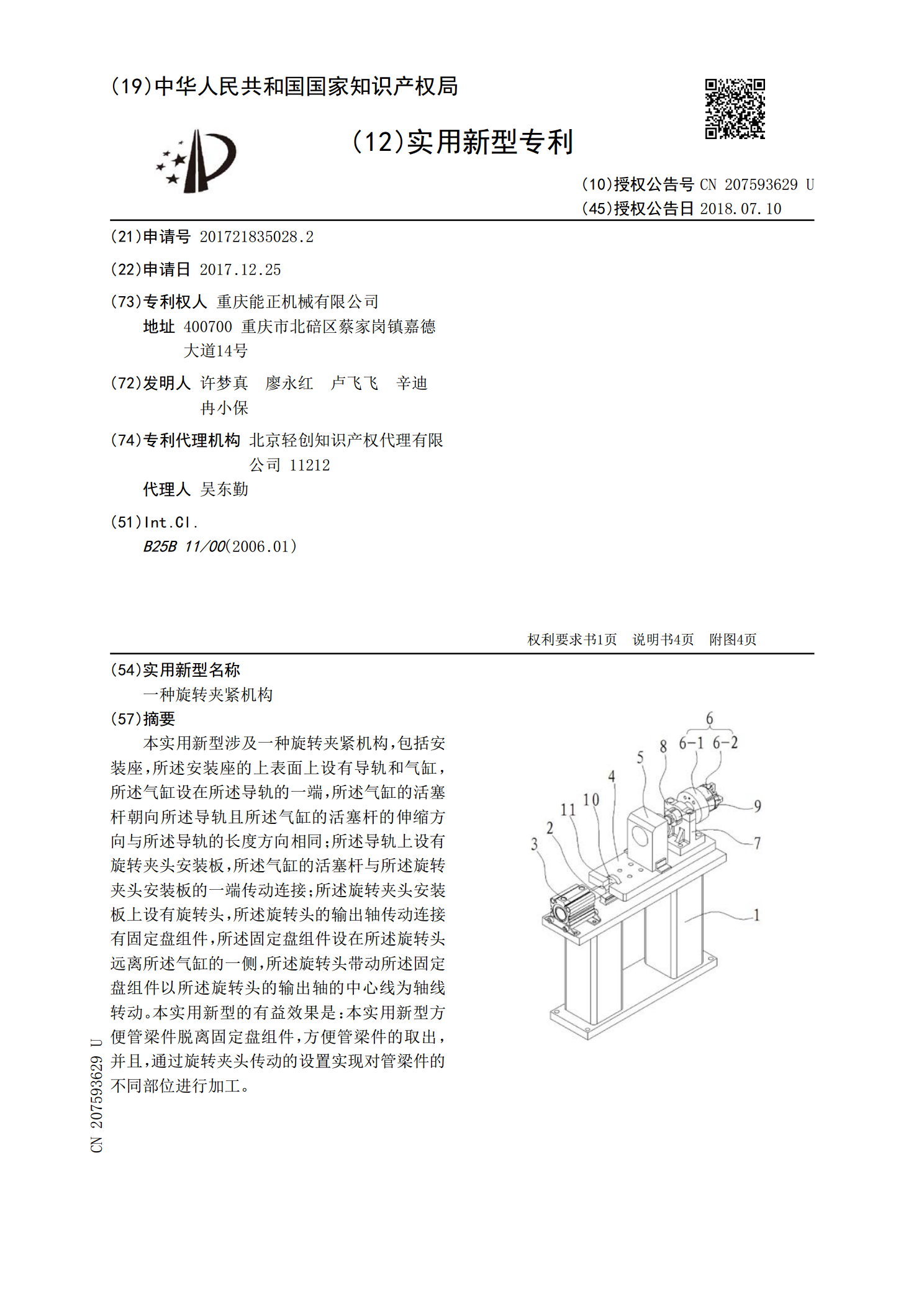
本实用新型涉及一种旋转夹紧机构,包括安装座,所述安装座的上表面上设有导轨和气缸,所述气缸设在所述导轨的一端,所述气缸的活塞杆朝向所述导轨且所述气缸的活塞杆的伸缩方向与所述导轨的长度方向相同;所述导轨上设有旋转夹头安装板,所述气缸的活塞杆与所述旋转夹头安装板的一端传动连接;所述旋转夹头安装板上设有旋转头,所述旋转头的输出轴传动连接有固定盘组件,所述固定盘组件设在所述旋转头远离所述气缸的一侧,所述旋转头带动所述固定盘组件以所述旋转头的输出轴的中心线为轴线转动。本实用新型的有益效果是:本实用新型方便管梁件脱离固