
一种弹性步态减重装置及其减重方法.pdf

美丽****ka


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种弹性步态减重装置及其减重方法.pdf
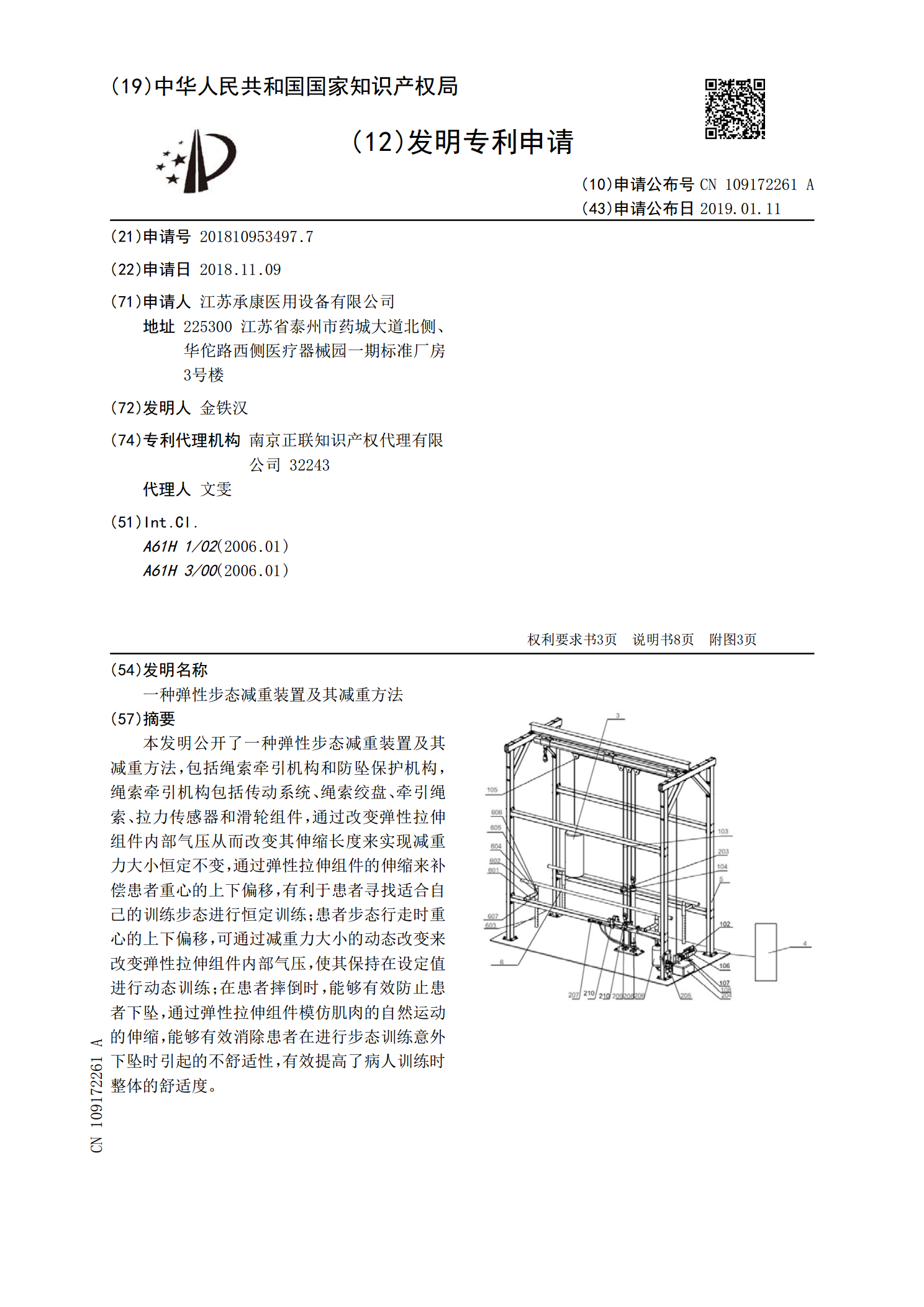
本发明公开了一种弹性步态减重装置及其减重方法,包括绳索牵引机构和防坠保护机构,绳索牵引机构包括传动系统、绳索绞盘、牵引绳索、拉力传感器和滑轮组件,通过改变弹性拉伸组件内部气压从而改变其伸缩长度来实现减重力大小恒定不变,通过弹性拉伸组件的伸缩来补偿患者重心的上下偏移,有利于患者寻找适合自己的训练步态进行恒定训练;患者步态行走时重心的上下偏移,可通过减重力大小的动态改变来改变弹性拉伸组件内部气压,使其保持在设定值进行动态训练;在患者摔倒时,能够有效防止患者下坠,通过弹性拉伸组件模仿肌肉的自然运动的伸缩,能够有
异常步态矫正减重步态重塑训练装置及其使用方法.pdf
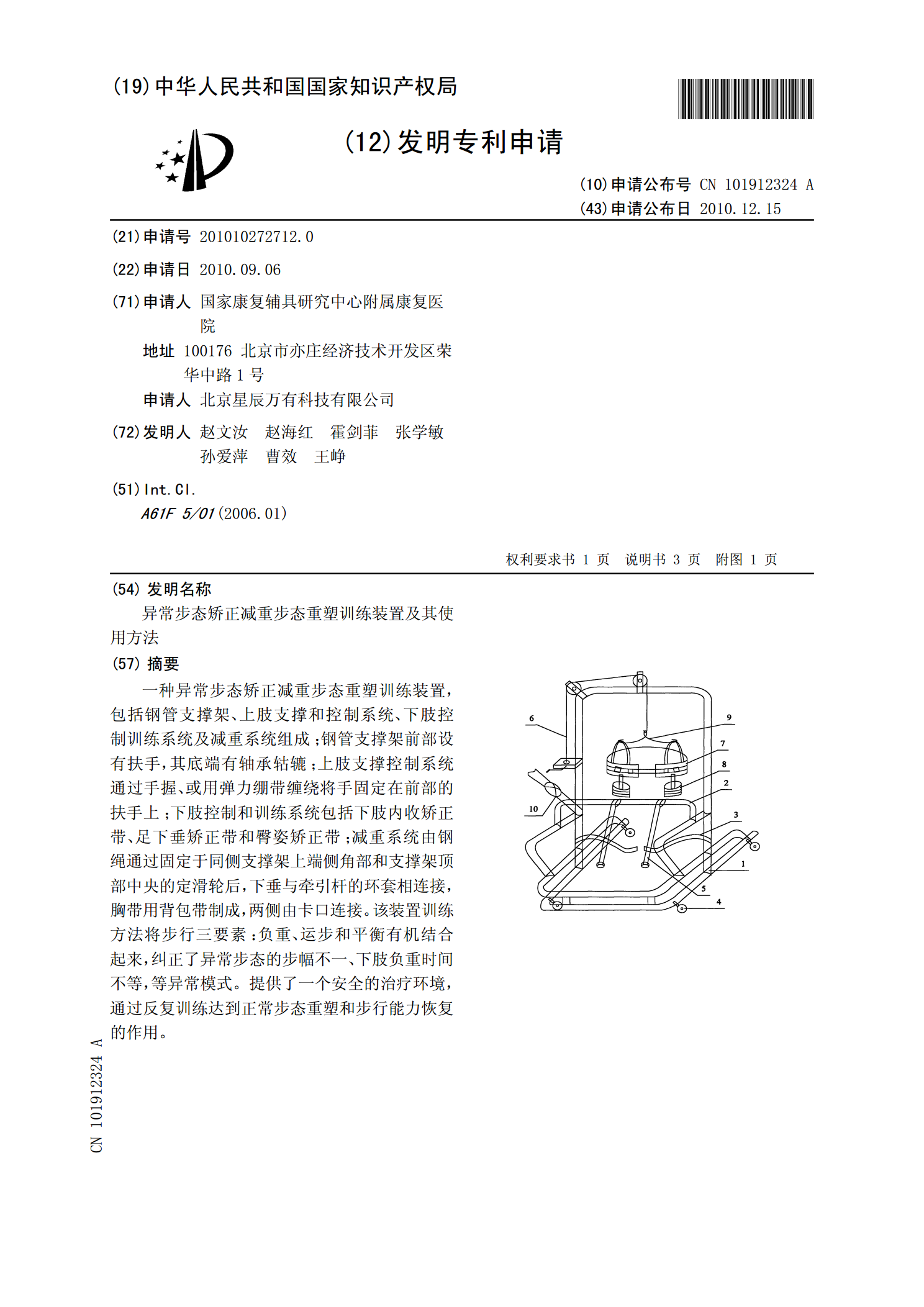
一种异常步态矫正减重步态重塑训练装置,包括钢管支撑架、上肢支撑和控制系统、下肢控制训练系统及减重系统组成;钢管支撑架前部设有扶手,其底端有轴承轱辘;上肢支撑控制系统通过手握、或用弹力绷带缠绕将手固定在前部的扶手上;下肢控制和训练系统包括下肢内收矫正带、足下垂矫正带和臀姿矫正带;减重系统由钢绳通过固定于同侧支撑架上端侧角部和支撑架顶部中央的定滑轮后,下垂与牵引杆的环套相连接,胸带用背包带制成,两侧由卡口连接。该装置训练方法将步行三要素:负重、运步和平衡有机结合起来,纠正了异常步态的步幅不一、下肢负重时间不等
一种气压减重步态监控训练系统及方法.pdf
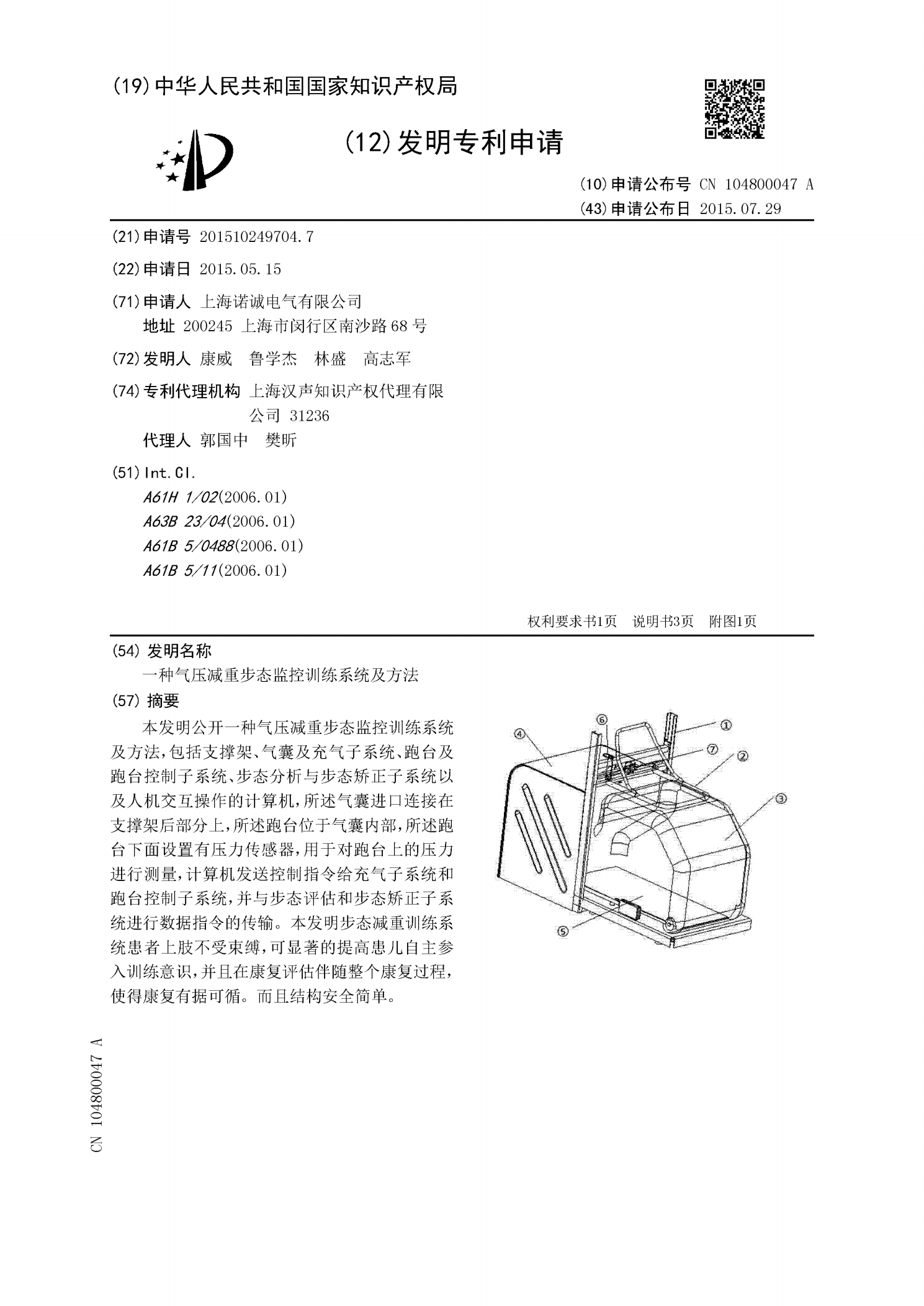
本发明公开一种气压减重步态监控训练系统及方法,包括支撑架、气囊及充气子系统、跑台及跑台控制子系统、步态分析与步态矫正子系统以及人机交互操作的计算机,所述气囊进口连接在支撑架后部分上,所述跑台位于气囊内部,所述跑台下面设置有压力传感器,用于对跑台上的压力进行测量,计算机发送控制指令给充气子系统和跑台控制子系统,并与步态评估和步态矫正子系统进行数据指令的传输。本发明步态减重训练系统患者上肢不受束缚,可显著的提高患儿自主参入训练意识,并且在康复评估伴随整个康复过程,使得康复有据可循。而且结构安全简单。

减重步态训练器.ppt
康复仪器(康复护理作业三)减重步态训练器活动平板手动功率车橡筋手指练习器髋关节旋转训练器牵引网架智能主被动训练器多功能训练器上肢推举训练器儿童站立架
减重步态训练机器人.pdf
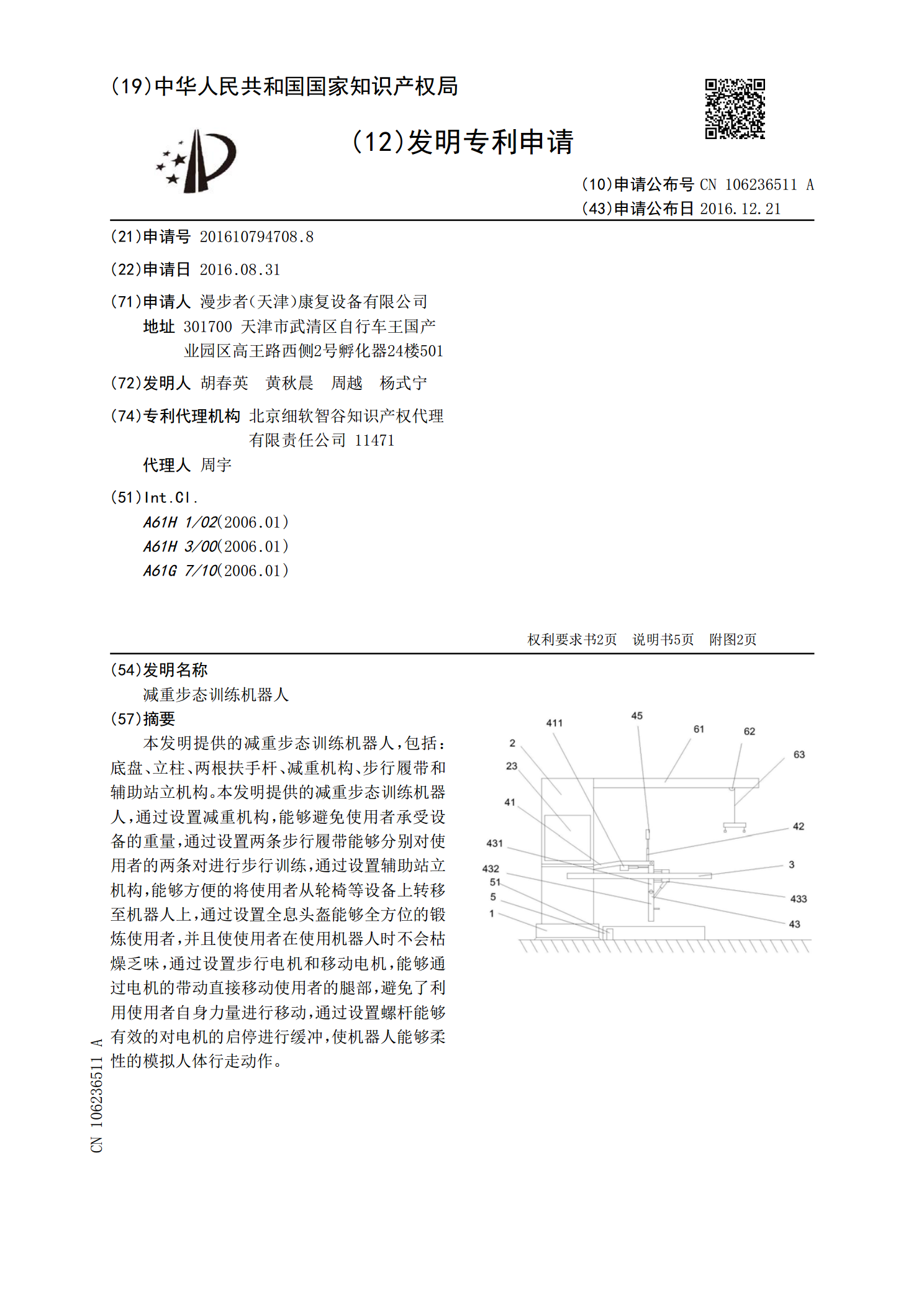
本发明提供的减重步态训练机器人,包括:底盘、立柱、两根扶手杆、减重机构、步行履带和辅助站立机构。本发明提供的减重步态训练机器人,通过设置减重机构,能够避免使用者承受设备的重量,通过设置两条步行履带能够分别对使用者的两条对进行步行训练,通过设置辅助站立机构,能够方便的将使用者从轮椅等设备上转移至机器人上,通过设置全息头盔能够全方位的锻炼使用者,并且使使用者在使用机器人时不会枯燥乏味,通过设置步行电机和移动电机,能够通过电机的带动直接移动使用者的腿部,避免了利用使用者自身力量进行移动,通过设置螺杆能够有效的对