
一种基于双MEMS-IMU的室内轮式机器人的定位方法.pdf

努力****承悦

1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双MEMS-IMU的室内轮式机器人的定位方法.pdf
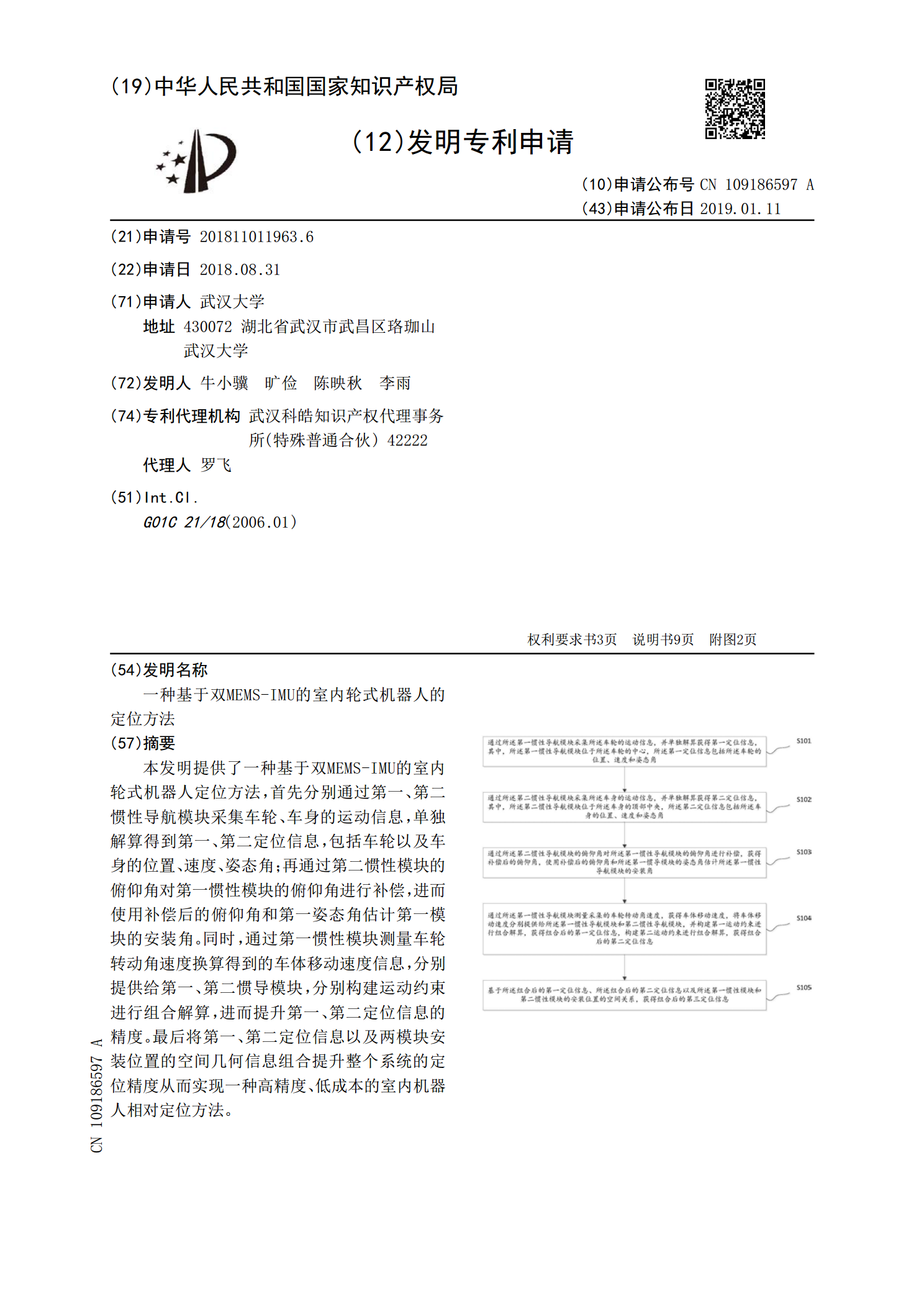
本发明提供了一种基于双MEMS‑IMU的室内轮式机器人定位方法,首先分别通过第一、第二惯性导航模块采集车轮、车身的运动信息,单独解算得到第一、第二定位信息,包括车轮以及车身的位置、速度、姿态角;再通过第二惯性模块的俯仰角对第一惯性模块的俯仰角进行补偿,进而使用补偿后的俯仰角和第一姿态角估计第一模块的安装角。同时,通过第一惯性模块测量车轮转动角速度换算得到的车体移动速度信息,分别提供给第一、第二惯导模块,分别构建运动约束进行组合解算,进而提升第一、第二定位信息的精度。最后将第一、第二定位信息以及两模块安装位

一种多个轮式机器人行走的室内视觉定位方法.pdf
本发明公开了一种多个轮式机器人行走的室内视觉定位方法,包括在室内周边设置与监控服务器连接的可见光摄像头,可见光摄像头视角覆盖机器人行走全部区域,监控服务器通过可见光摄像头获取机器人的行走轨迹,向机器人发送导航坐标,调整可见光的摄像头的焦距、视角参数并在后续的操作中维持不变,所述方法包括区域坐标标定、对多个机器人握手并分割多个机器人跟踪视频和对机器人行走跟踪;本发明的“GMM+KCF”视频跟踪算法,在继承传统KCF算法运行高效特点的同时,利用GMM算法进行在线模板更新,有效地克服了传统KCF算法无法适应的W

一种基于IMU的轮式机器人定位方法.pdf
本发明提供了一种基于IMU的轮式机器人定位方法,属于机器人定位领域。其特征在于,通过在正常的SLAM算法中,建立一个包含N个姿态值att的滑动窗口,存储包含N个IMU数据、运动学参数滑动窗口用于回溯,使用IMU做纯惯性导航的方法来解决机器人“绑架”问题,即在发生碰撞、打滑等情况时把位置、姿态的更新算法切换到IMU的纯惯性导航算法上。本发明所述的方法解决了在一些窄视角、短距离测距模块应用中无法识别远距离物体、而近距场景在“绑架”时扫描匹配的结果也不是很准确、里程计和激光测距模块都无法使用的问题,而且该算法计
一种轮式机器人定位方法和轮式机器人.pdf
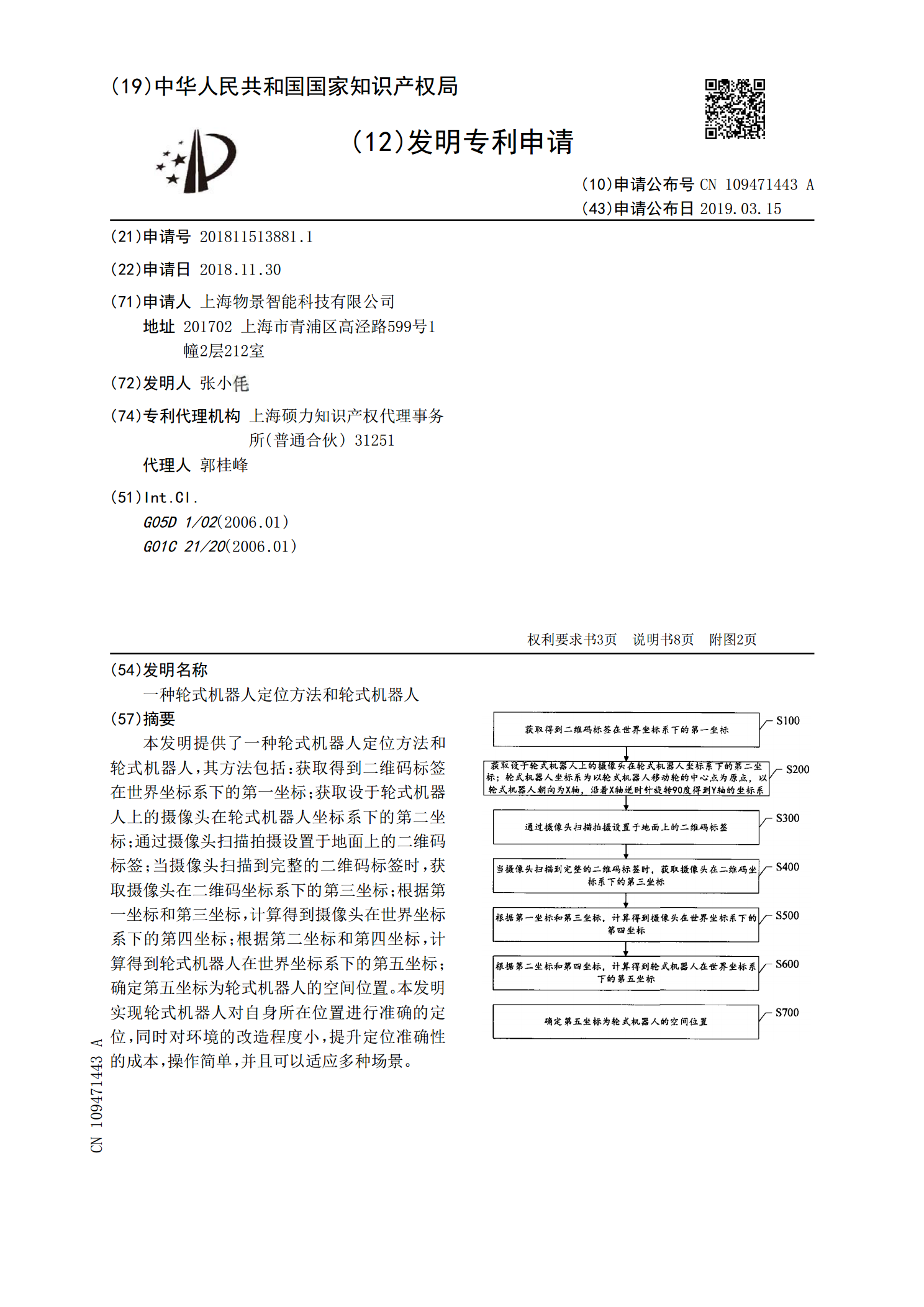
本发明提供了一种轮式机器人定位方法和轮式机器人,其方法包括:获取得到二维码标签在世界坐标系下的第一坐标;获取设于轮式机器人上的摄像头在轮式机器人坐标系下的第二坐标;通过摄像头扫描拍摄设置于地面上的二维码标签;当摄像头扫描到完整的二维码标签时,获取摄像头在二维码坐标系下的第三坐标;根据第一坐标和第三坐标,计算得到摄像头在世界坐标系下的第四坐标;根据第二坐标和第四坐标,计算得到轮式机器人在世界坐标系下的第五坐标;确定第五坐标为轮式机器人的空间位置。本发明实现轮式机器人对自身所在位置进行准确的定位,同时对环境的
一种基于并联绳索机构的室内机器人定位装置及定位方法.pdf
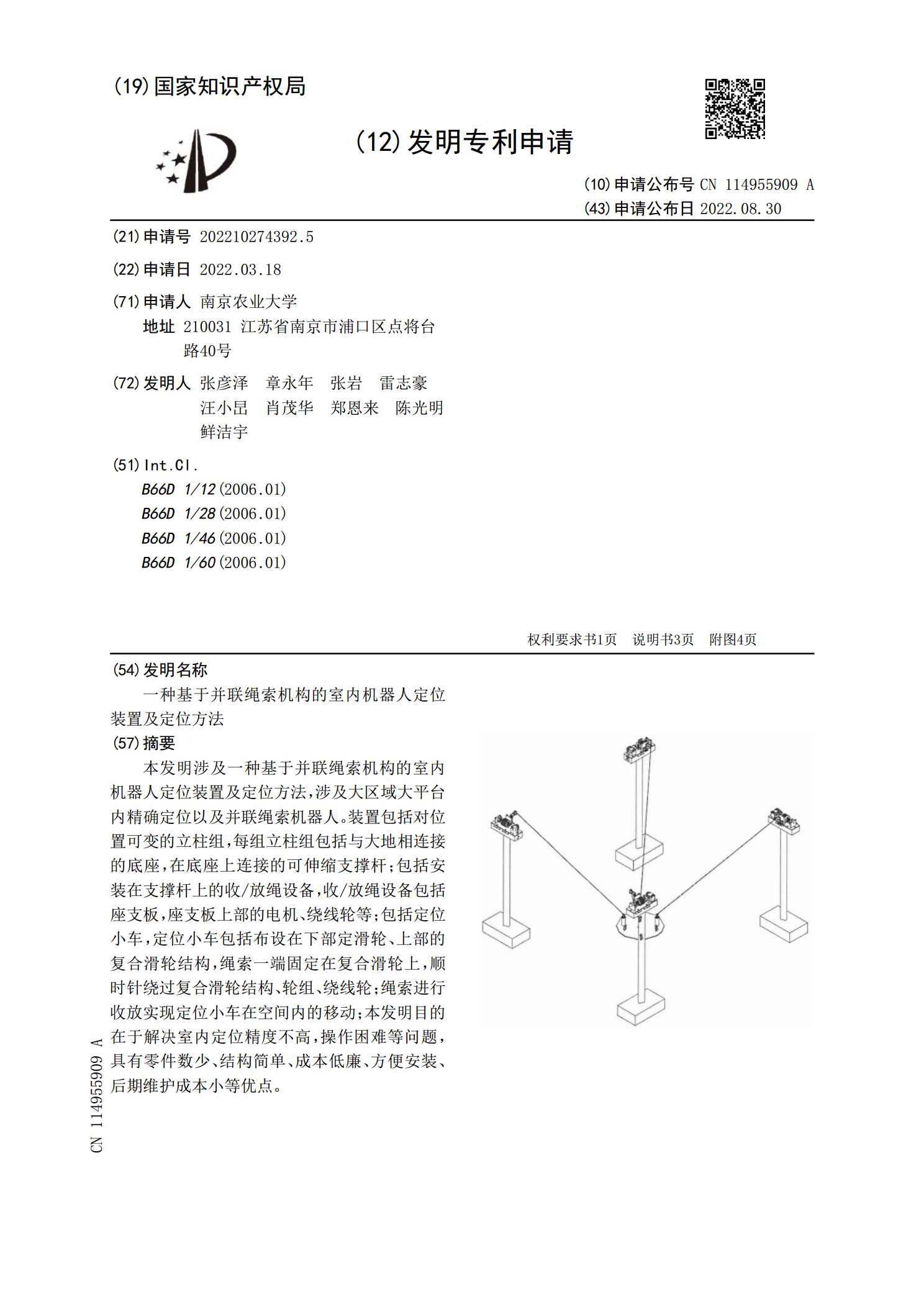
本发明涉及一种基于并联绳索机构的室内机器人定位装置及定位方法,涉及大区域大平台内精确定位以及并联绳索机器人。装置包括对位置可变的立柱组,每组立柱组包括与大地相连接的底座,在底座上连接的可伸缩支撑杆;包括安装在支撑杆上的收/放绳设备,收/放绳设备包括座支板,座支板上部的电机、绕线轮等;包括定位小车,定位小车包括布设在下部定滑轮、上部的复合滑轮结构,绳索一端固定在复合滑轮上,顺时针绕过复合滑轮结构、轮组、绕线轮;绳索进行收放实现定位小车在空间内的移动;本发明目的在于解决室内定位精度不高,操作困难等问题,具有零