
一种多个轮式机器人行走的室内视觉定位方法.pdf

努力****甲寅


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多个轮式机器人行走的室内视觉定位方法.pdf
本发明公开了一种多个轮式机器人行走的室内视觉定位方法,包括在室内周边设置与监控服务器连接的可见光摄像头,可见光摄像头视角覆盖机器人行走全部区域,监控服务器通过可见光摄像头获取机器人的行走轨迹,向机器人发送导航坐标,调整可见光的摄像头的焦距、视角参数并在后续的操作中维持不变,所述方法包括区域坐标标定、对多个机器人握手并分割多个机器人跟踪视频和对机器人行走跟踪;本发明的“GMM+KCF”视频跟踪算法,在继承传统KCF算法运行高效特点的同时,利用GMM算法进行在线模板更新,有效地克服了传统KCF算法无法适应的W

一种基于视觉的机器人室内定位导航方法.pdf
本发明公开了一种基于视觉的机器人室内定位导航方法,属于视觉导航领域。该方法是根据二维码的思路,设计了一种简单方便、易于识别、内含绝对位置坐标且具有一定纠错能力的人工路标,将路标设置于天花板上,由安装在机器人上且光轴与天花板垂直的摄像机进行拍摄,再通过图像的阈值分割、连通域提取、轮廓曲线匹配以及路标特征识别一系列步骤定位路标,解析路标中所包含的坐标信息,最终通过机器人的位置估计算法获得机器人当前的绝对位置和航向角。本发明方法减少了遮挡及噪声干扰,大大降低了图像处理方法、时间以及周围环境的复杂度。
一种轮式机器人定位方法和轮式机器人.pdf
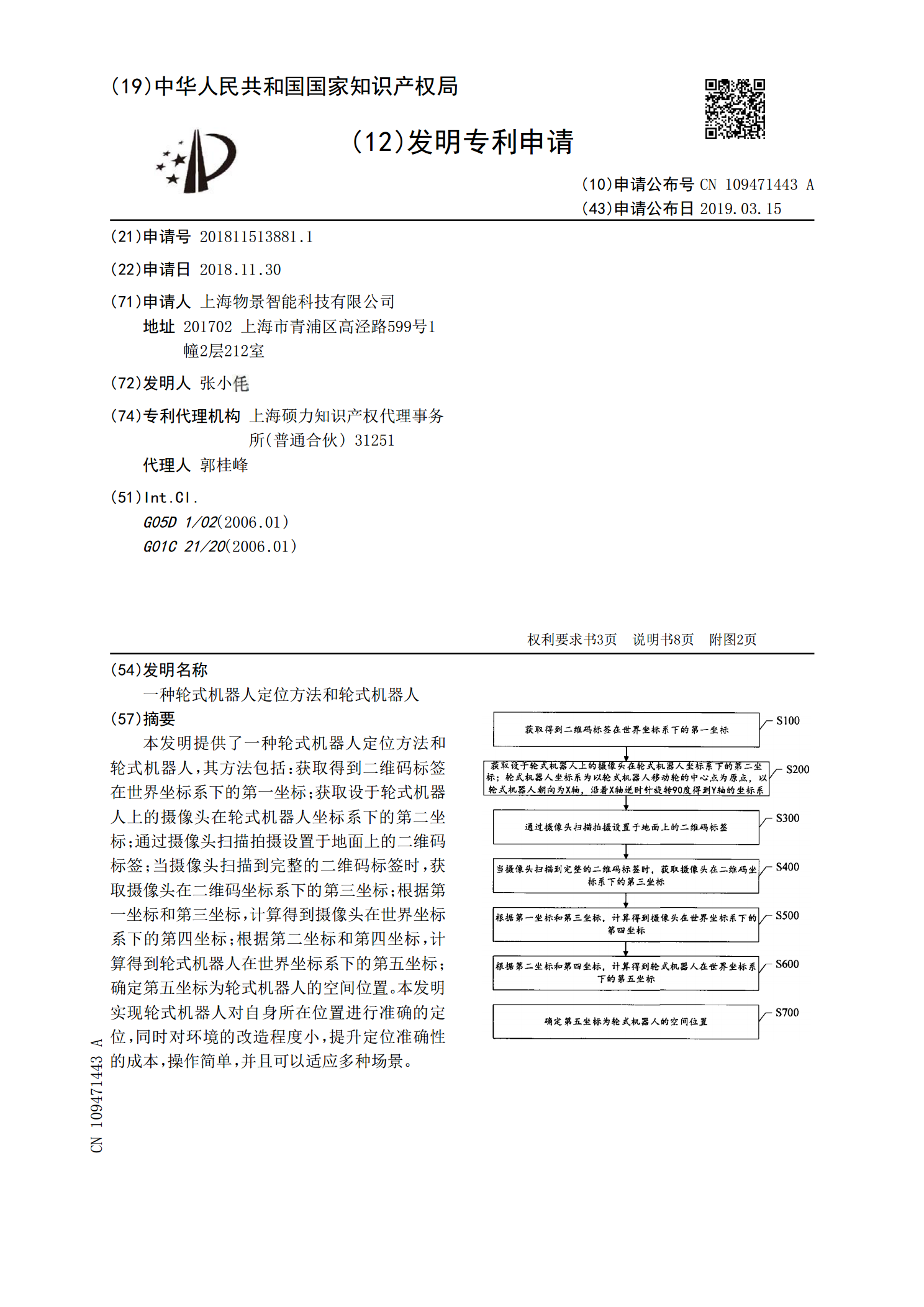
本发明提供了一种轮式机器人定位方法和轮式机器人,其方法包括:获取得到二维码标签在世界坐标系下的第一坐标;获取设于轮式机器人上的摄像头在轮式机器人坐标系下的第二坐标;通过摄像头扫描拍摄设置于地面上的二维码标签;当摄像头扫描到完整的二维码标签时,获取摄像头在二维码坐标系下的第三坐标;根据第一坐标和第三坐标,计算得到摄像头在世界坐标系下的第四坐标;根据第二坐标和第四坐标,计算得到轮式机器人在世界坐标系下的第五坐标;确定第五坐标为轮式机器人的空间位置。本发明实现轮式机器人对自身所在位置进行准确的定位,同时对环境的
一种基于双MEMS-IMU的室内轮式机器人的定位方法.pdf
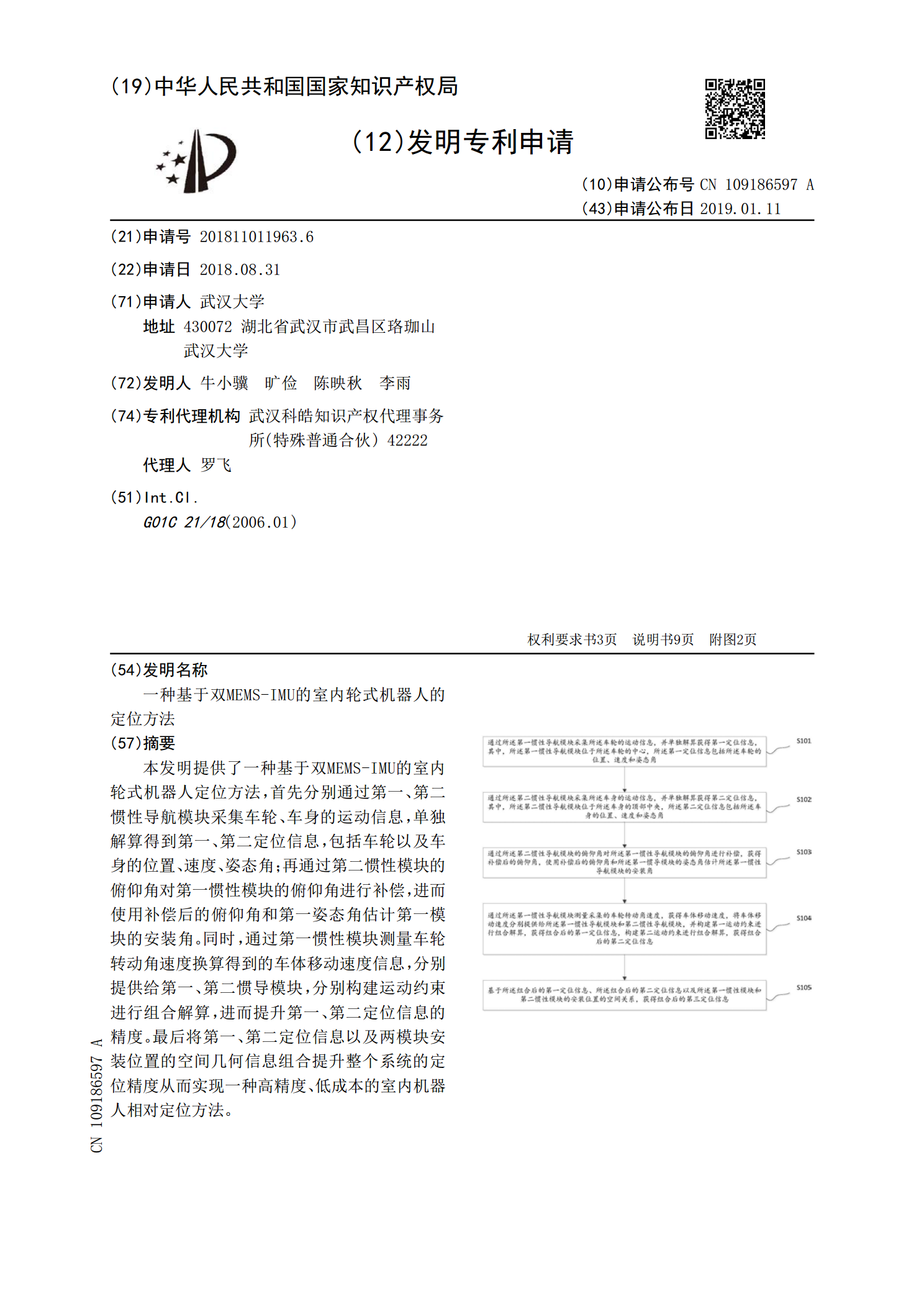
本发明提供了一种基于双MEMS‑IMU的室内轮式机器人定位方法,首先分别通过第一、第二惯性导航模块采集车轮、车身的运动信息,单独解算得到第一、第二定位信息,包括车轮以及车身的位置、速度、姿态角;再通过第二惯性模块的俯仰角对第一惯性模块的俯仰角进行补偿,进而使用补偿后的俯仰角和第一姿态角估计第一模块的安装角。同时,通过第一惯性模块测量车轮转动角速度换算得到的车体移动速度信息,分别提供给第一、第二惯导模块,分别构建运动约束进行组合解算,进而提升第一、第二定位信息的精度。最后将第一、第二定位信息以及两模块安装位

一种机器人视觉定位方法.pdf
本发明公开了一种机器人视觉定位方法,该方法包括:S1,对工件进行图像采集、预处理及轮廓的提取;S2,对特征向量进行距离归一化处理;S3,确定候选匹配点集;S4,得到初始匹配点集;S5,剔除误匹配点对。