
地面巡检机器人升降装置、升降方法及地面巡检机器人.pdf

一吃****福乾


1/9

2/9

3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
地面巡检机器人升降装置、升降方法及地面巡检机器人.pdf
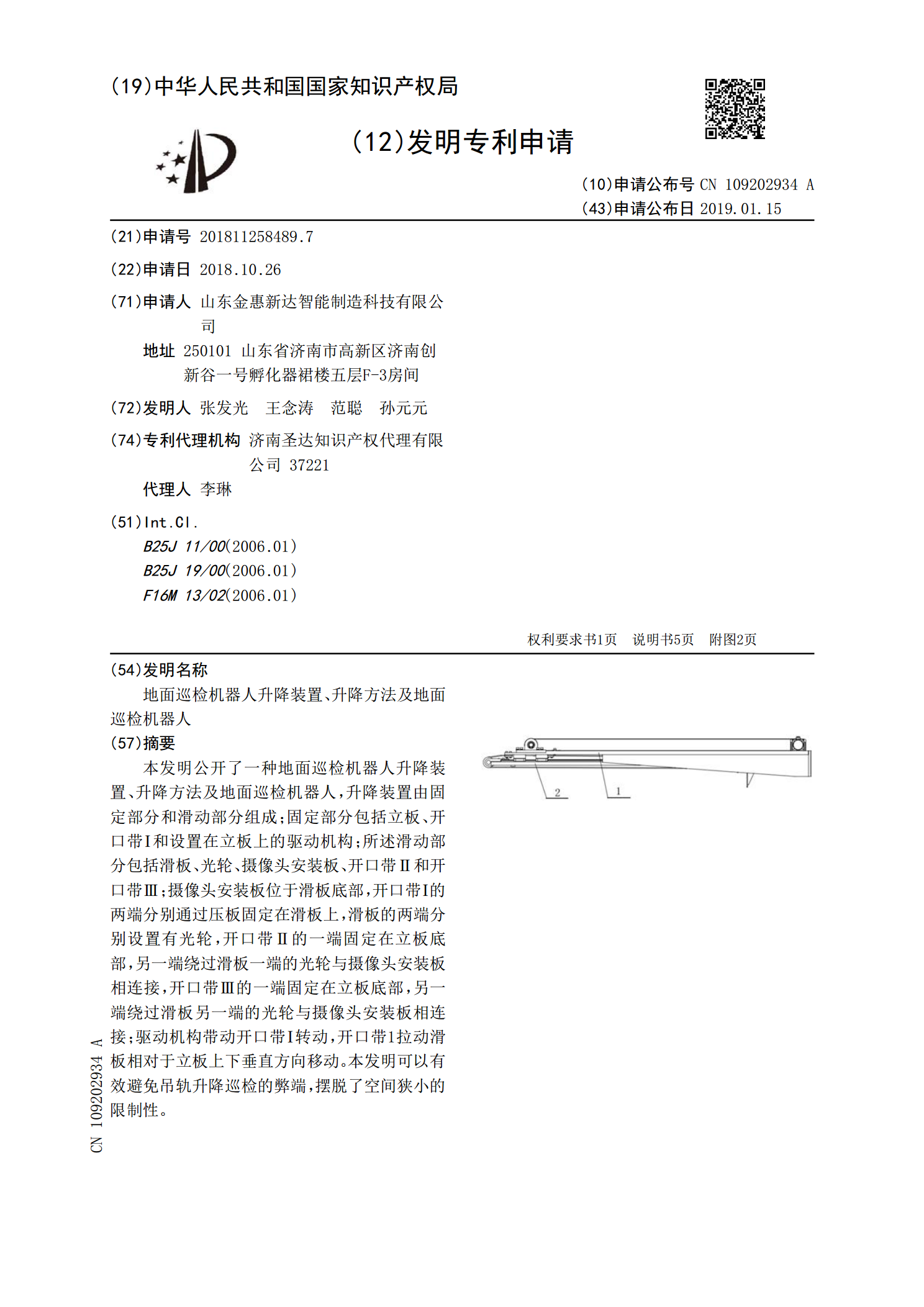
本发明公开了一种地面巡检机器人升降装置、升降方法及地面巡检机器人,升降装置由固定部分和滑动部分组成;固定部分包括立板、开口带Ⅰ和设置在立板上的驱动机构;所述滑动部分包括滑板、光轮、摄像头安装板、开口带Ⅱ和开口带Ⅲ;摄像头安装板位于滑板底部,开口带Ⅰ的两端分别通过压板固定在滑板上,滑板的两端分别设置有光轮,开口带Ⅱ的一端固定在立板底部,另一端绕过滑板一端的光轮与摄像头安装板相连接,开口带Ⅲ的一端固定在立板底部,另一端绕过滑板另一端的光轮与摄像头安装板相连接;驱动机构带动开口带Ⅰ转动,开口带1拉动滑板相对于立
变电站巡检机器人装车升降装置.pdf
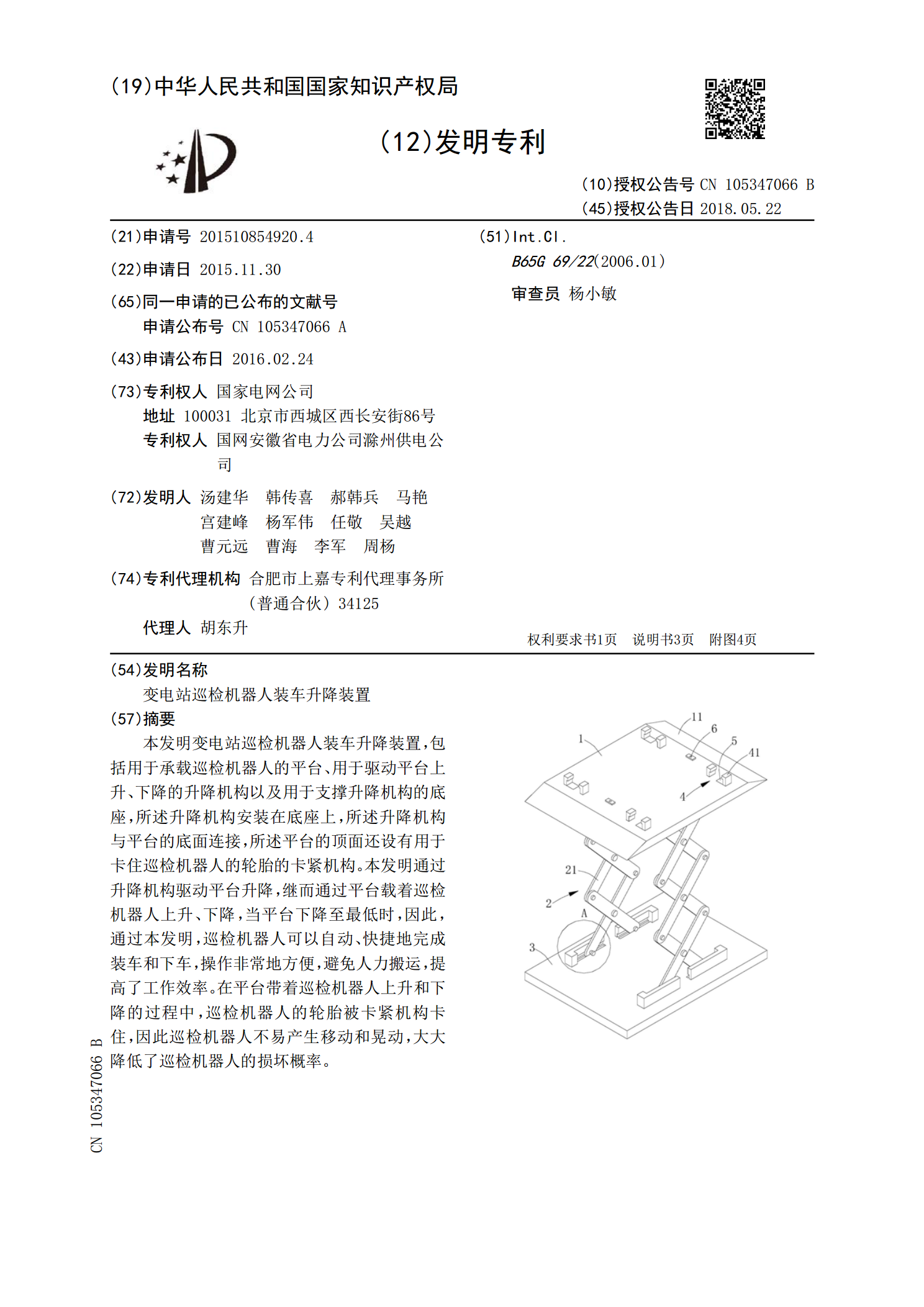
本发明变电站巡检机器人装车升降装置,包括用于承载巡检机器人的平台、用于驱动平台上升、下降的升降机构以及用于支撑升降机构的底座,所述升降机构安装在底座上,所述升降机构与平台的底面连接,所述平台的顶面还设有用于卡住巡检机器人的轮胎的卡紧机构。本发明通过升降机构驱动平台升降,继而通过平台载着巡检机器人上升、下降,当平台下降至最低时,因此,通过本发明,巡检机器人可以自动、快捷地完成装车和下车,操作非常地方便,避免人力搬运,提高了工作效率。在平台带着巡检机器人上升和下降的过程中,巡检机器人的轮胎被卡紧机构卡住,因此

一种无人机与地面巡检机器人协同作业的巡检方法及装置.pdf
本申请提供一种无人机与地面巡检机器人协同作业的巡检方法及装置,所述方法包括:基于厂区内设备的位置信息和所述厂区的环境要素,确定空中巡检路径和地面巡检路径;接收无人机基于所述空中巡检路径获取的目标设备的第一目标信息,以及接收地面巡检机器人基于所述地面巡检路径获取的所述目标设备的第二目标信息;基于所述第一目标信息和所述第二目标信息,获取所述目标设备的运行状态信息;基于所述运行状态信息与预设基准信息,确定所述目标设备的运行状态。
一种变电站巡检机器人转运升降装置.pdf
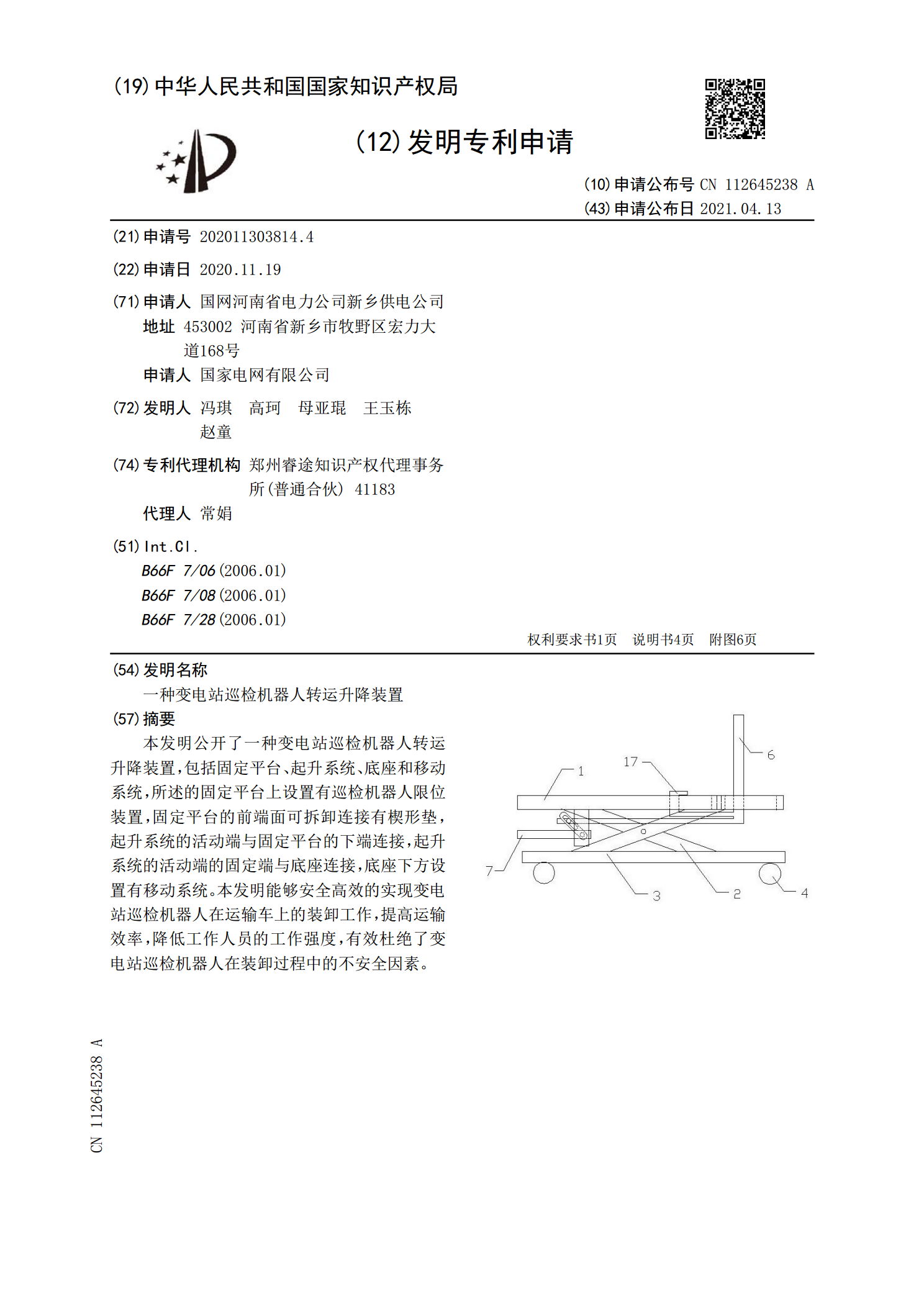
本发明公开了一种变电站巡检机器人转运升降装置,包括固定平台、起升系统、底座和移动系统,所述的固定平台上设置有巡检机器人限位装置,固定平台的前端面可拆卸连接有楔形垫,起升系统的活动端与固定平台的下端连接,起升系统的活动端的固定端与底座连接,底座下方设置有移动系统。本发明能够安全高效的实现变电站巡检机器人在运输车上的装卸工作,提高运输效率,降低工作人员的工作强度,有效杜绝了变电站巡检机器人在装卸过程中的不安全因素。

巡检机器人、巡检机器人上线控制方法及装置.pdf
本发明涉及一种巡检机器人、巡检机器人上线控制方法及装置,其中,巡检机器人,包括处理机构、飞行机构、辅助上线机构以及滚轮机构;辅助上线机构包括辅助支架和挂钩;处理机构包括壳体以及装设在壳体内的处理器;处理器在获取到辅助支架至输电线的距离值时,向飞行机构传输空中停机指令;飞行机构根据空中停机指令在空中停机;处理器在距离值小于或等于距离阈值时,向飞行机构传输挂钩上线指令;飞行机构根据挂钩上线指令进行挂钩上线飞行;处理器确认挂钩挂在输电线时,向飞行机构传输滚轮上线指令;飞行机构根据滚轮上线指令进行滚轮上线飞行。本