
测量系统的标定方法、装置、电子设备及可读存储介质.pdf

邻家****mk

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
测量系统的标定方法、装置、电子设备及可读存储介质.pdf
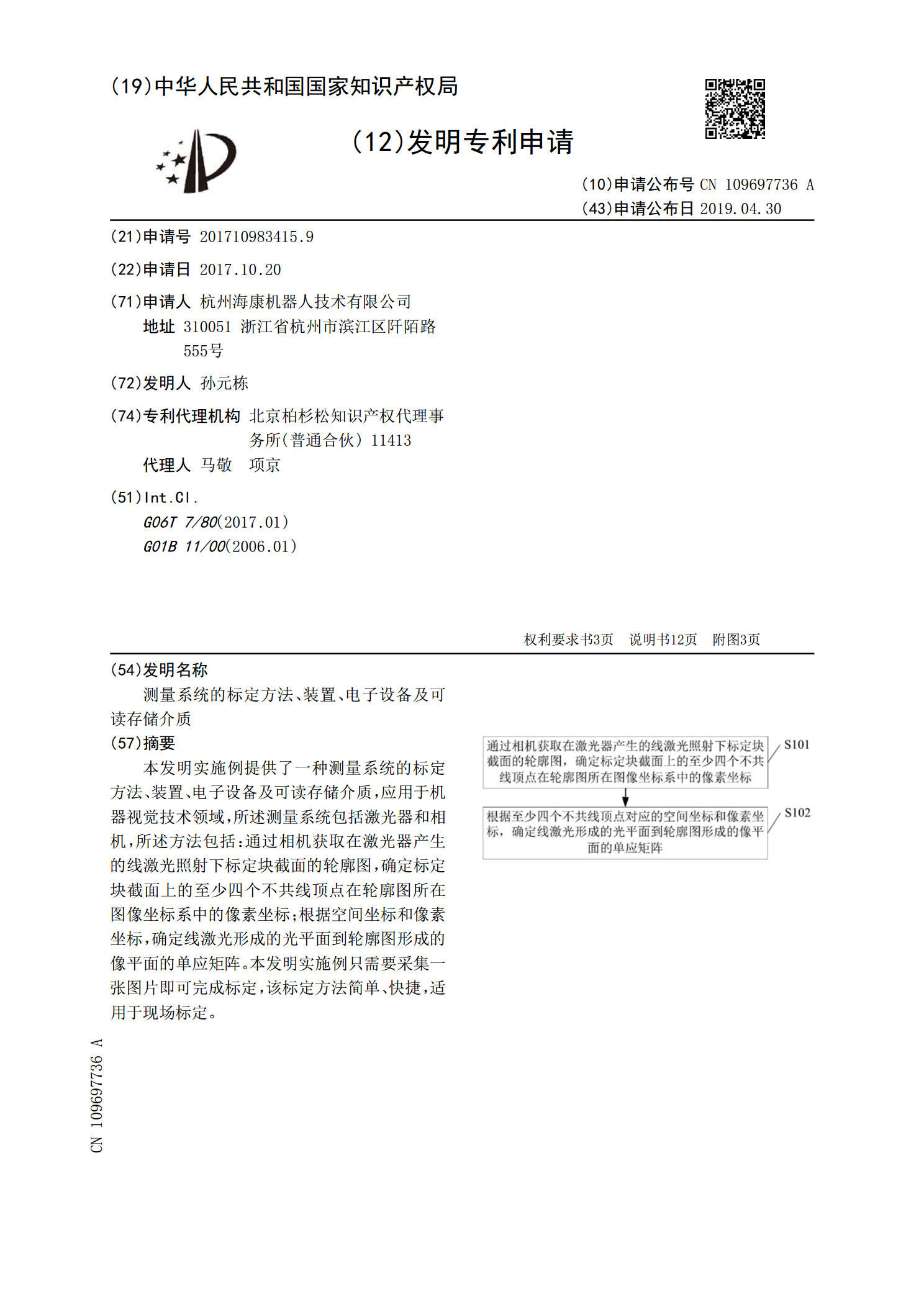
本发明实施例提供了一种测量系统的标定方法、装置、电子设备及可读存储介质,应用于机器视觉技术领域,所述测量系统包括激光器和相机,所述方法包括:通过相机获取在激光器产生的线激光照射下标定块截面的轮廓图,确定标定块截面上的至少四个不共线顶点在轮廓图所在图像坐标系中的像素坐标;根据空间坐标和像素坐标,确定线激光形成的光平面到轮廓图形成的像平面的单应矩阵。本发明实施例只需要采集一张图片即可完成标定,该标定方法简单、快捷,适用于现场标定。
测量系统的标定方法、装置、电子设备及可读存储介质.pdf
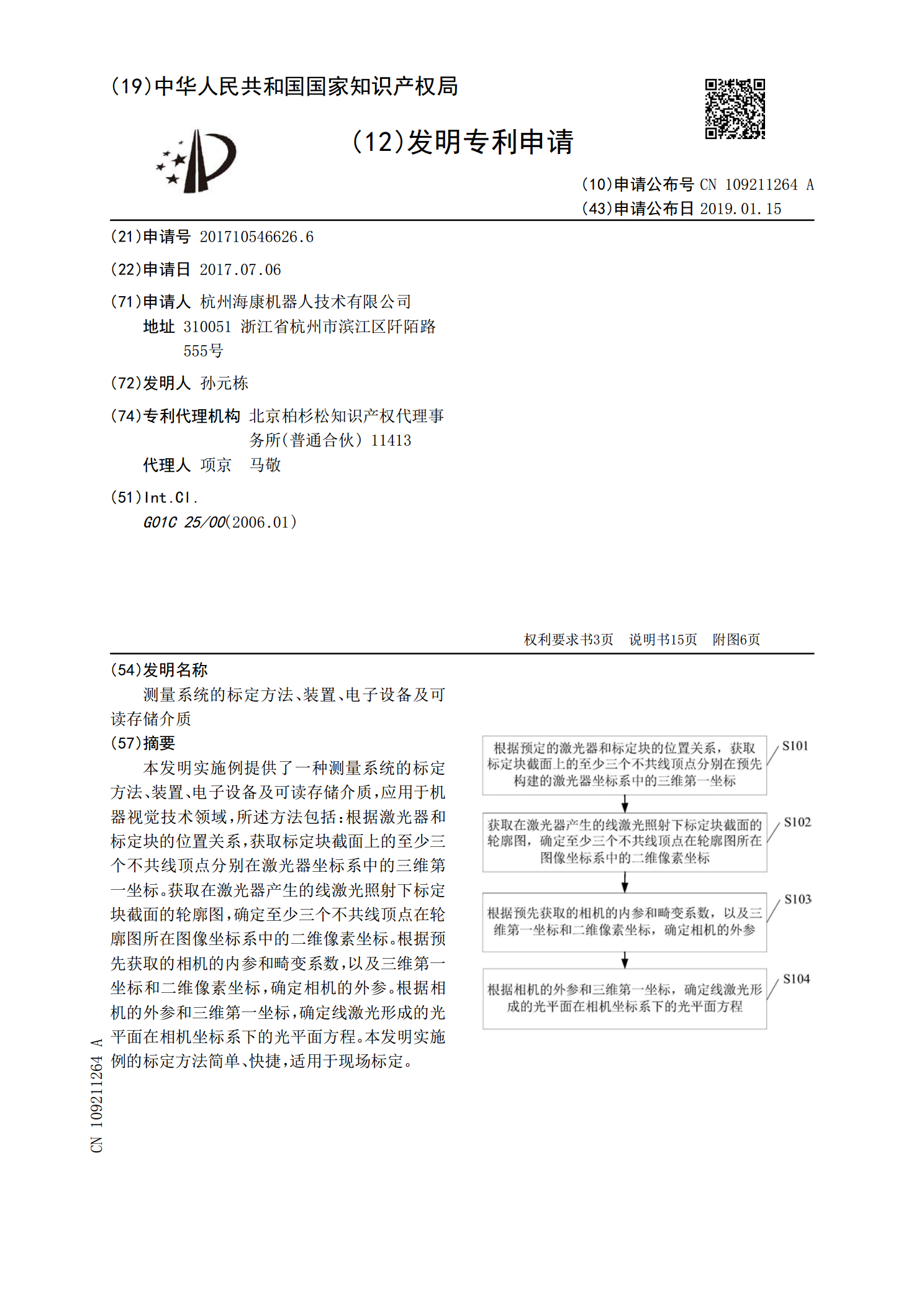
本发明实施例提供了一种测量系统的标定方法、装置、电子设备及可读存储介质,应用于机器视觉技术领域,所述方法包括:根据激光器和标定块的位置关系,获取标定块截面上的至少三个不共线顶点分别在激光器坐标系中的三维第一坐标。获取在激光器产生的线激光照射下标定块截面的轮廓图,确定至少三个不共线顶点在轮廓图所在图像坐标系中的二维像素坐标。根据预先获取的相机的内参和畸变系数,以及三维第一坐标和二维像素坐标,确定相机的外参。根据相机的外参和三维第一坐标,确定线激光形成的光平面在相机坐标系下的光平面方程。本发明实施例的标定方法
登录方法、装置、系统、电子设备及可读存储介质.pdf
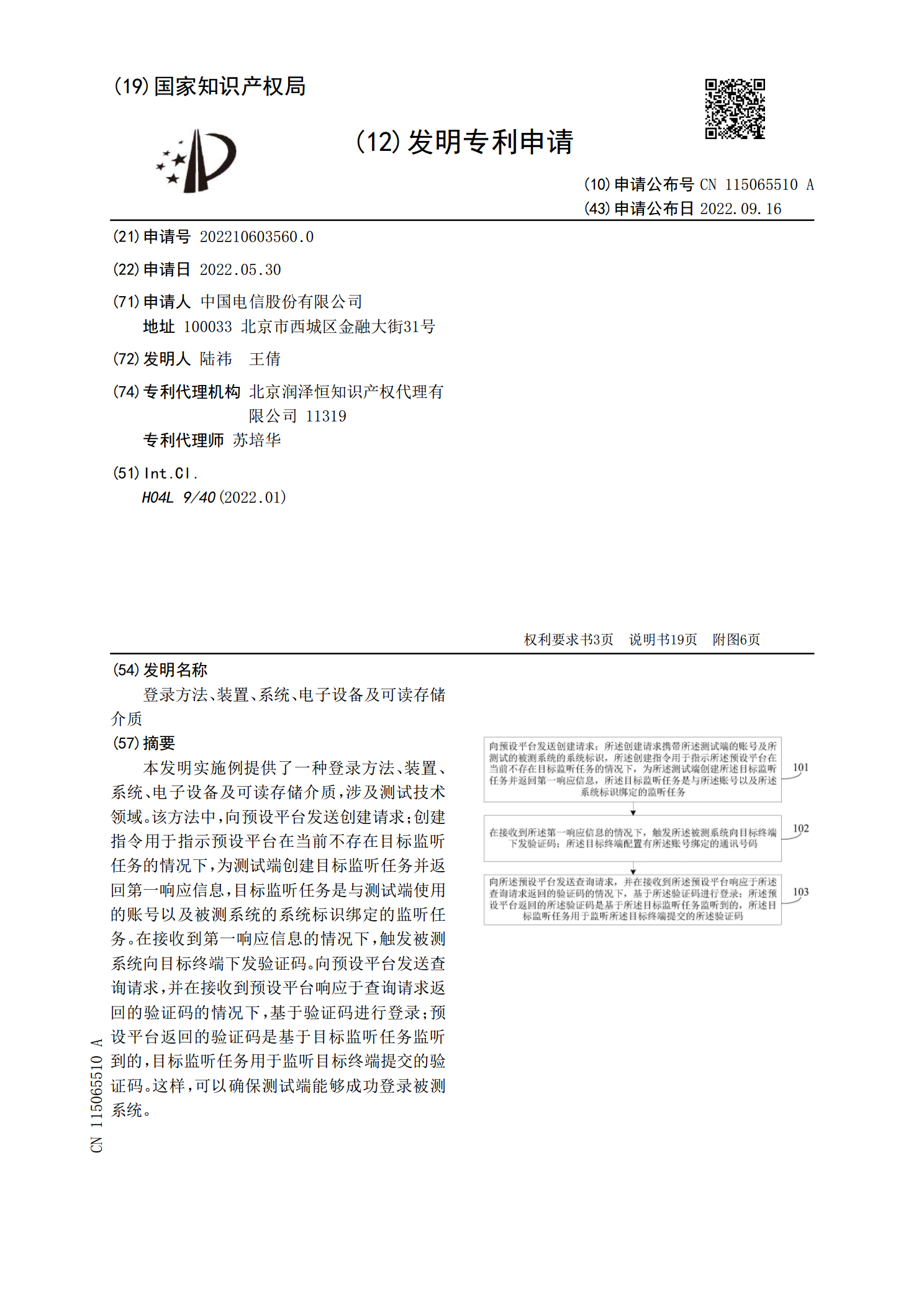
本发明实施例提供了一种登录方法、装置、系统、电子设备及可读存储介质,涉及测试技术领域。该方法中,向预设平台发送创建请求;创建指令用于指示预设平台在当前不存在目标监听任务的情况下,为测试端创建目标监听任务并返回第一响应信息,目标监听任务是与测试端使用的账号以及被测系统的系统标识绑定的监听任务。在接收到第一响应信息的情况下,触发被测系统向目标终端下发验证码。向预设平台发送查询请求,并在接收到预设平台响应于查询请求返回的验证码的情况下,基于验证码进行登录;预设平台返回的验证码是基于目标监听任务监听到的,目标监听
电池管理系统标定方法、装置、存储介质及电子设备.pdf
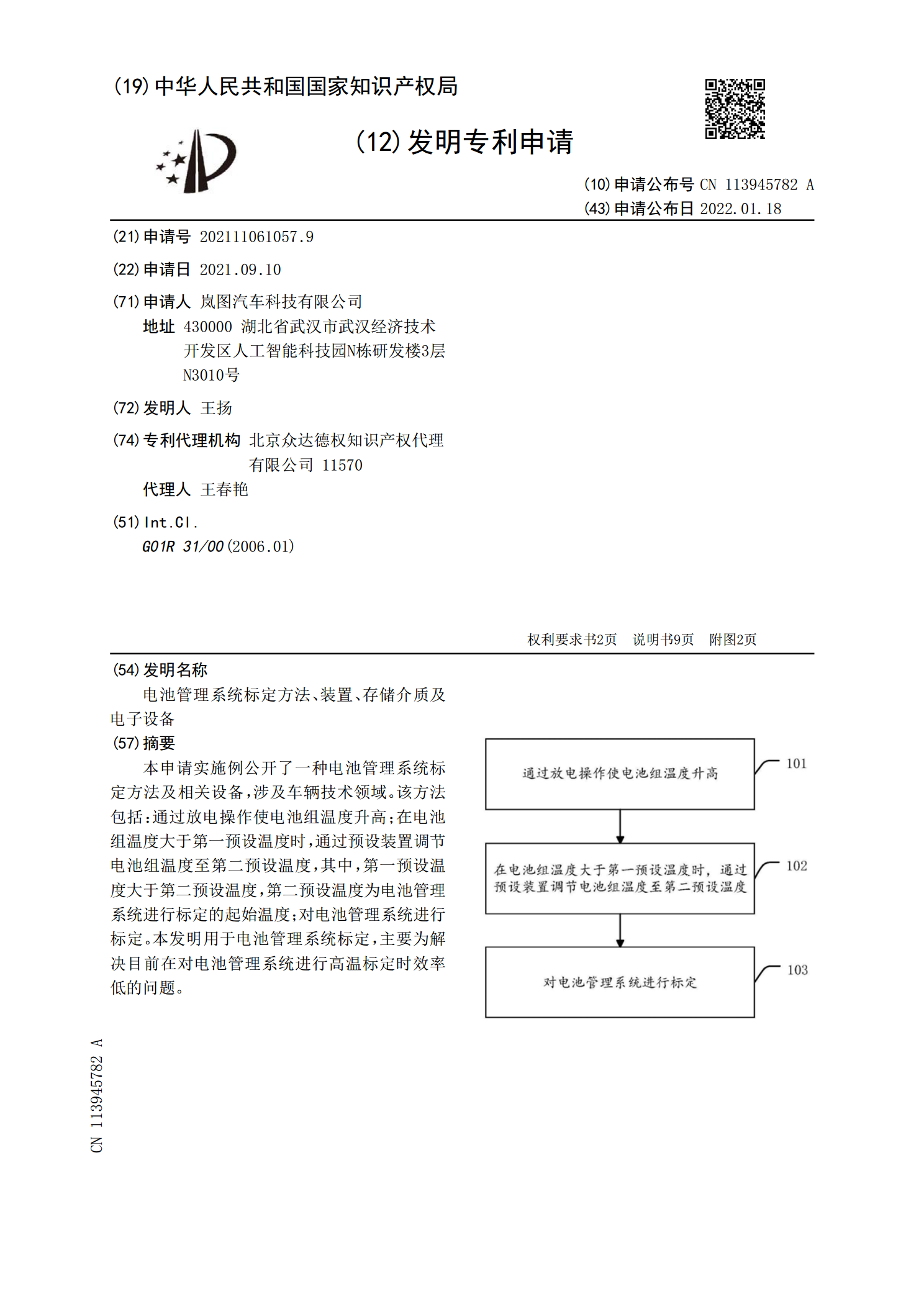
本申请实施例公开了一种电池管理系统标定方法及相关设备,涉及车辆技术领域。该方法包括:通过放电操作使电池组温度升高;在电池组温度大于第一预设温度时,通过预设装置调节电池组温度至第二预设温度,其中,第一预设温度大于第二预设温度,第二预设温度为电池管理系统进行标定的起始温度;对电池管理系统进行标定。本发明用于电池管理系统标定,主要为解决目前在对电池管理系统进行高温标定时效率低的问题。
手眼标定方法、装置、电子设备和计算机可读存储介质.pdf
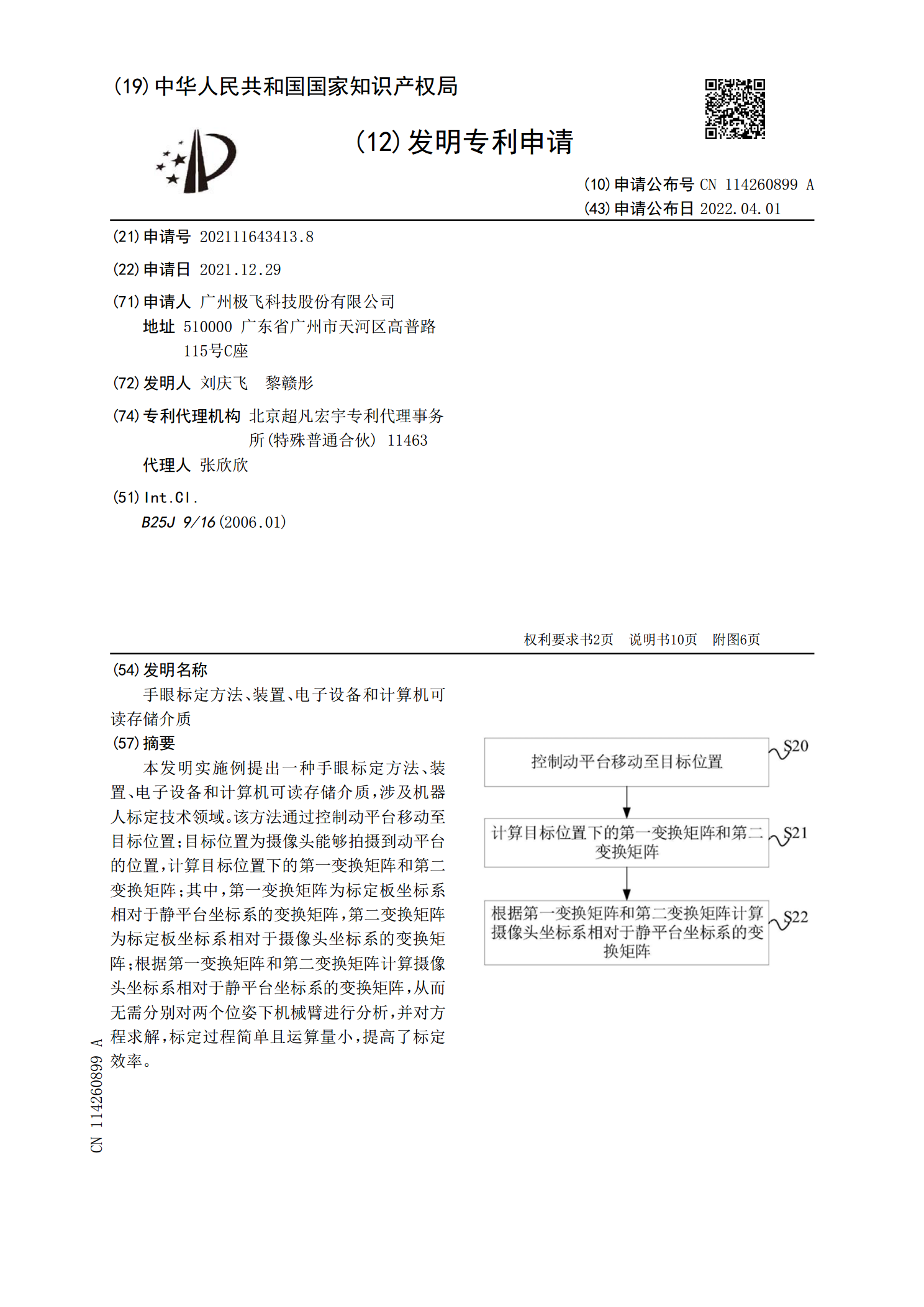
本发明实施例提出一种手眼标定方法、装置、电子设备和计算机可读存储介质,涉及机器人标定技术领域。该方法通过控制动平台移动至目标位置;目标位置为摄像头能够拍摄到动平台的位置,计算目标位置下的第一变换矩阵和第二变换矩阵;其中,第一变换矩阵为标定板坐标系相对于静平台坐标系的变换矩阵,第二变换矩阵为标定板坐标系相对于摄像头坐标系的变换矩阵;根据第一变换矩阵和第二变换矩阵计算摄像头坐标系相对于静平台坐标系的变换矩阵,从而无需分别对两个位姿下机械臂进行分析,并对方程求解,标定过程简单且运算量小,提高了标定效率。