
一种可穿戴式下肢外骨骼机器人.pdf

贤惠****66

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可穿戴式下肢外骨骼机器人.pdf
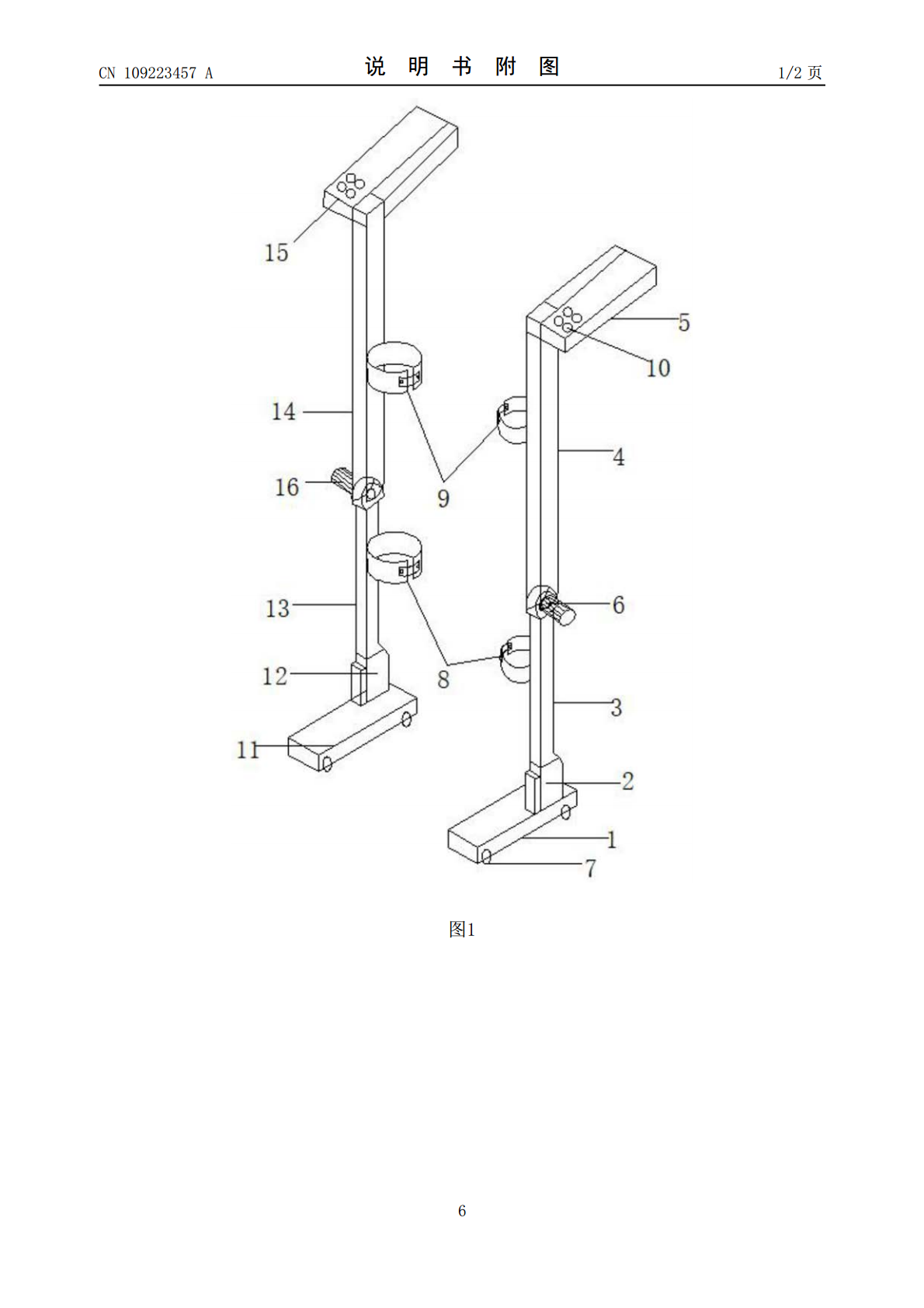
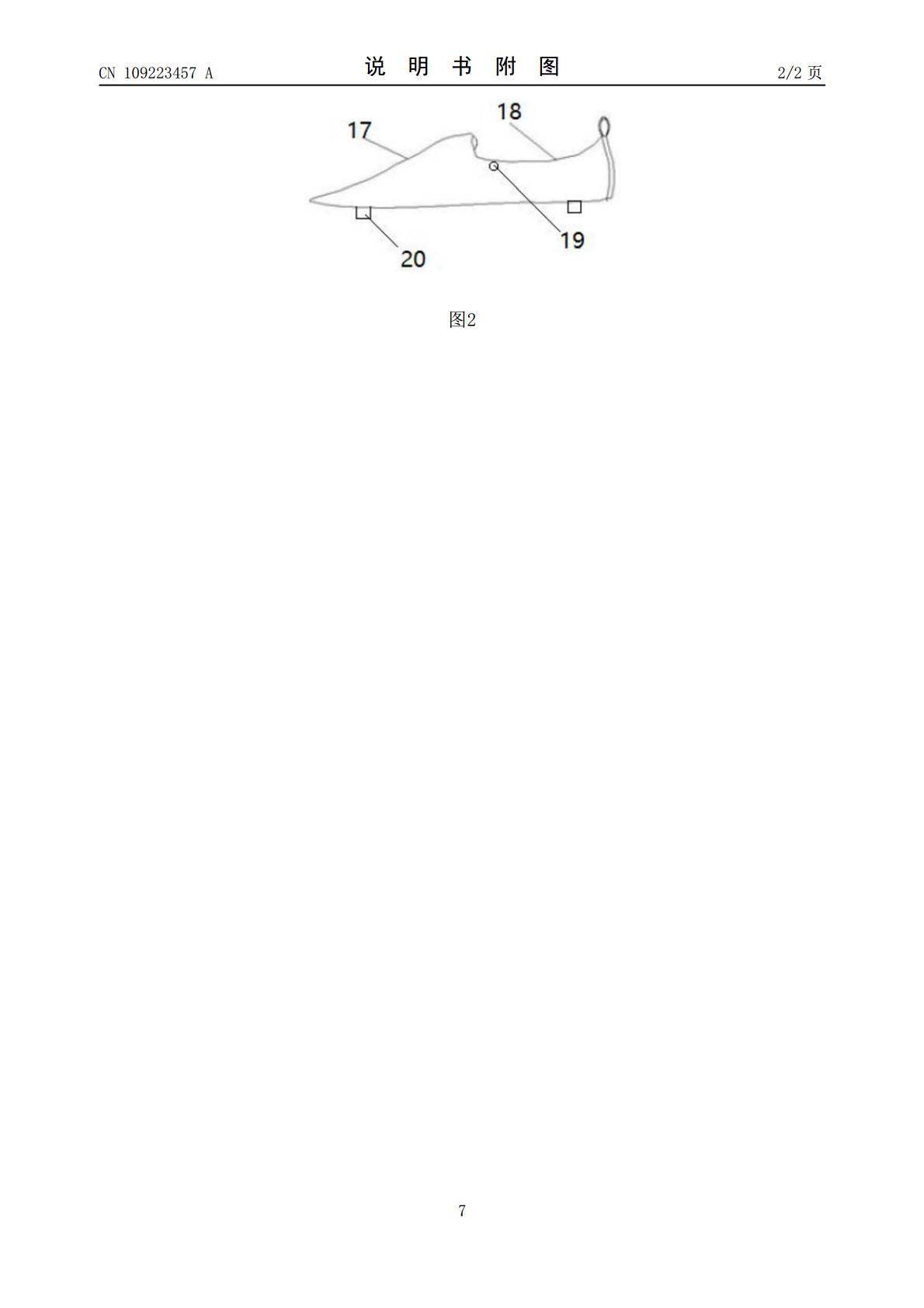
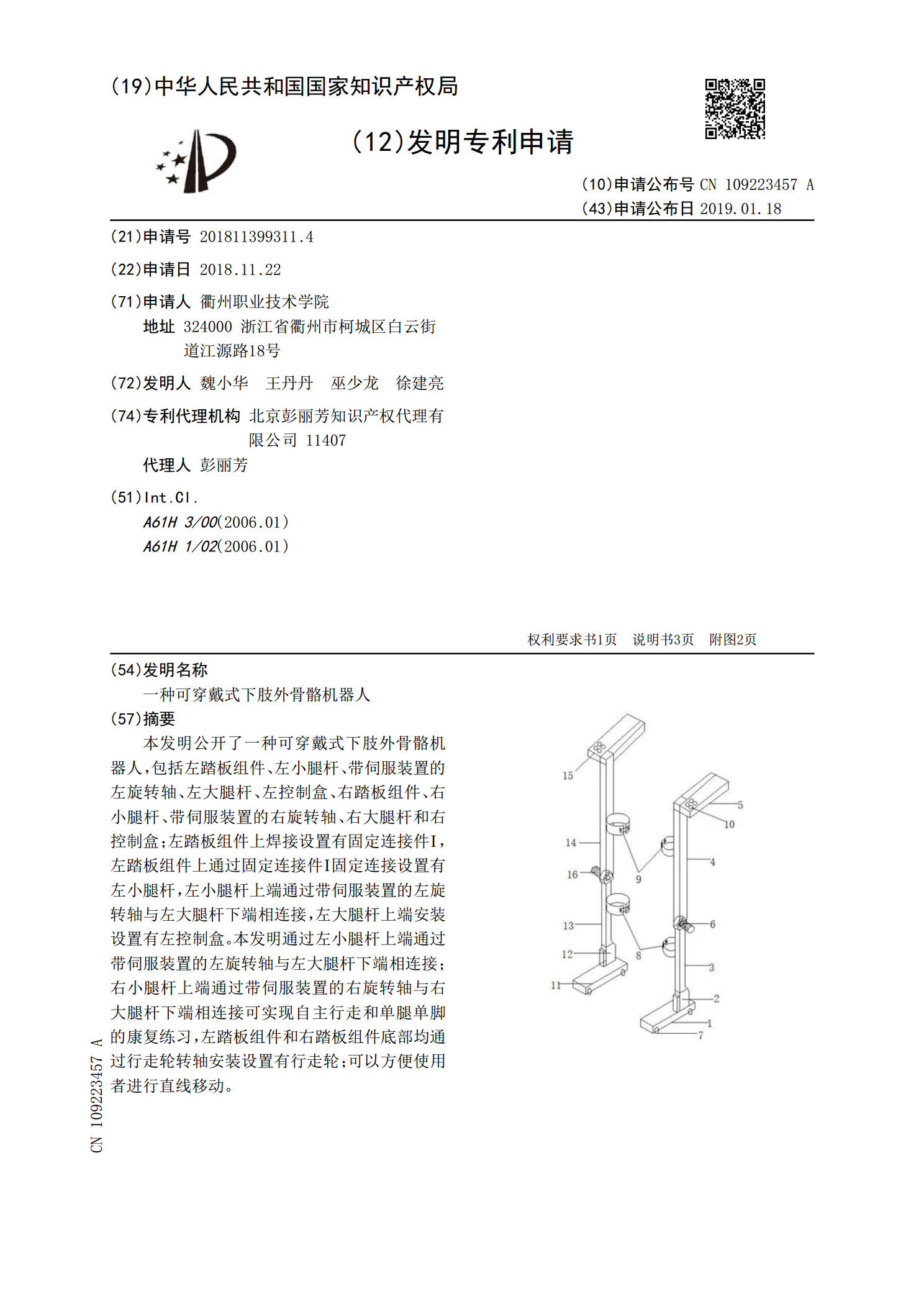
本发明公开了一种可穿戴式下肢外骨骼机器人,包括左踏板组件、左小腿杆、带伺服装置的左旋转轴、左大腿杆、左控制盒、右踏板组件、右小腿杆、带伺服装置的右旋转轴、右大腿杆和右控制盒;左踏板组件上焊接设置有固定连接件Ⅰ,左踏板组件上通过固定连接件Ⅰ固定连接设置有左小腿杆,左小腿杆上端通过带伺服装置的左旋转轴与左大腿杆下端相连接,左大腿杆上端安装设置有左控制盒。本发明通过左小腿杆上端通过带伺服装置的左旋转轴与左大腿杆下端相连接;右小腿杆上端通过带伺服装置的右旋转轴与右大腿杆下端相连接可实现自主行走和单腿单脚的康复练习
一种穿戴式下肢外骨骼助行机器人.pdf
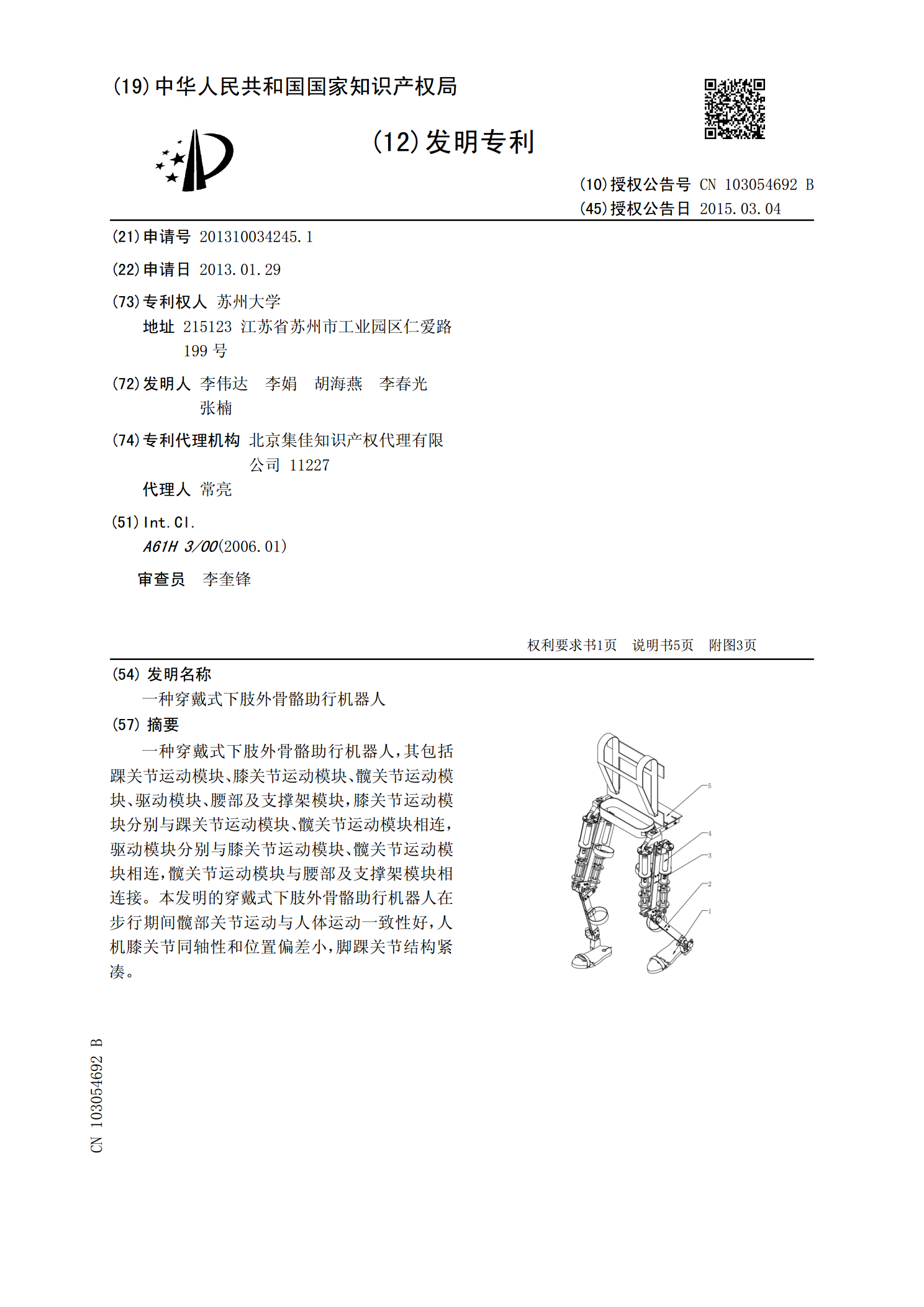
一种穿戴式下肢外骨骼助行机器人,其包括踝关节运动模块、膝关节运动模块、髋关节运动模块、驱动模块、腰部及支撑架模块,膝关节运动模块分别与踝关节运动模块、髋关节运动模块相连,驱动模块分别与膝关节运动模块、髋关节运动模块相连,髋关节运动模块与腰部及支撑架模块相连接。本发明的穿戴式下肢外骨骼助行机器人在步行期间髋部关节运动与人体运动一致性好,人机膝关节同轴性和位置偏差小,脚踝关节结构紧凑。
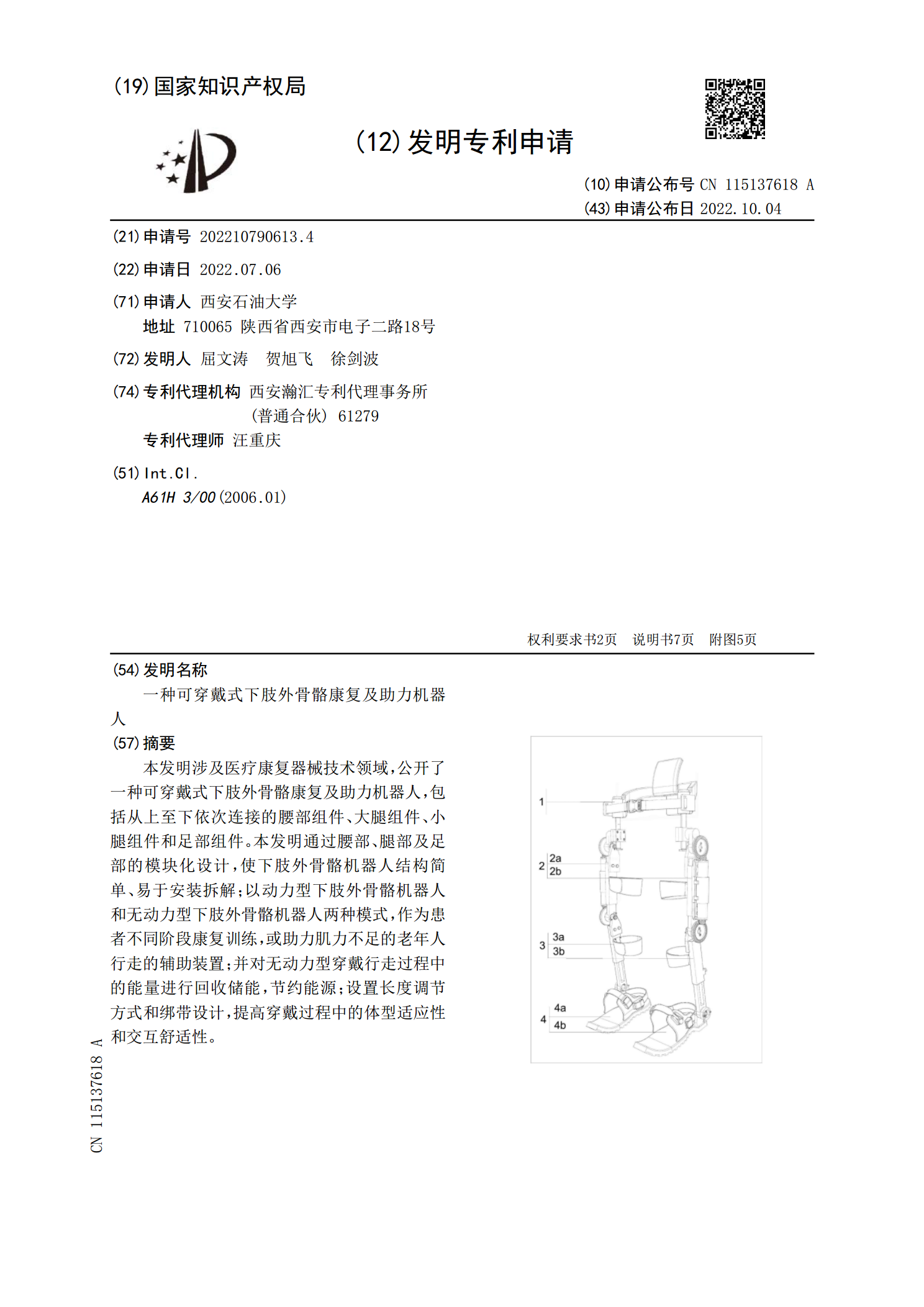
一种可穿戴式下肢外骨骼康复及助力机器人.pdf
本发明涉及医疗康复器械技术领域,公开了一种可穿戴式下肢外骨骼康复及助力机器人,包括从上至下依次连接的腰部组件、大腿组件、小腿组件和足部组件。本发明通过腰部、腿部及足部的模块化设计,使下肢外骨骼机器人结构简单、易于安装拆解;以动力型下肢外骨骼机器人和无动力型下肢外骨骼机器人两种模式,作为患者不同阶段康复训练,或助力肌力不足的老年人行走的辅助装置;并对无动力型穿戴行走过程中的能量进行回收储能,节约能源;设置长度调节方式和绑带设计,提高穿戴过程中的体型适应性和交互舒适性。

一种用于穿戴式下肢外骨骼机器人的足部装置.pdf
本发明公开了一种用于穿戴式下肢外骨骼机器人的足部装置,包括第一执行机构、驱动齿轮机构、从动齿轮机构、小腿连杆、球笼式万向节、转动调节装置、第二执行机构、电机固定托板、第一复位弹簧、踝关节控制板、足履、圆杆和第二复位弹簧;本发明实现了踝关节三个自由度可调节的转动,实现了对不同患者或者同一患者不同时期的踝部关节的主动性训练,活动自由度多而且实用性较强;采用球笼式万向节既能实现在跖屈/背屈运动到不同角度中均能实现踝关节的旋内/旋外运动,也能保证电机转速与踝关节的转速始终保持一致;设置的复位弹簧提高了关节运动的稳
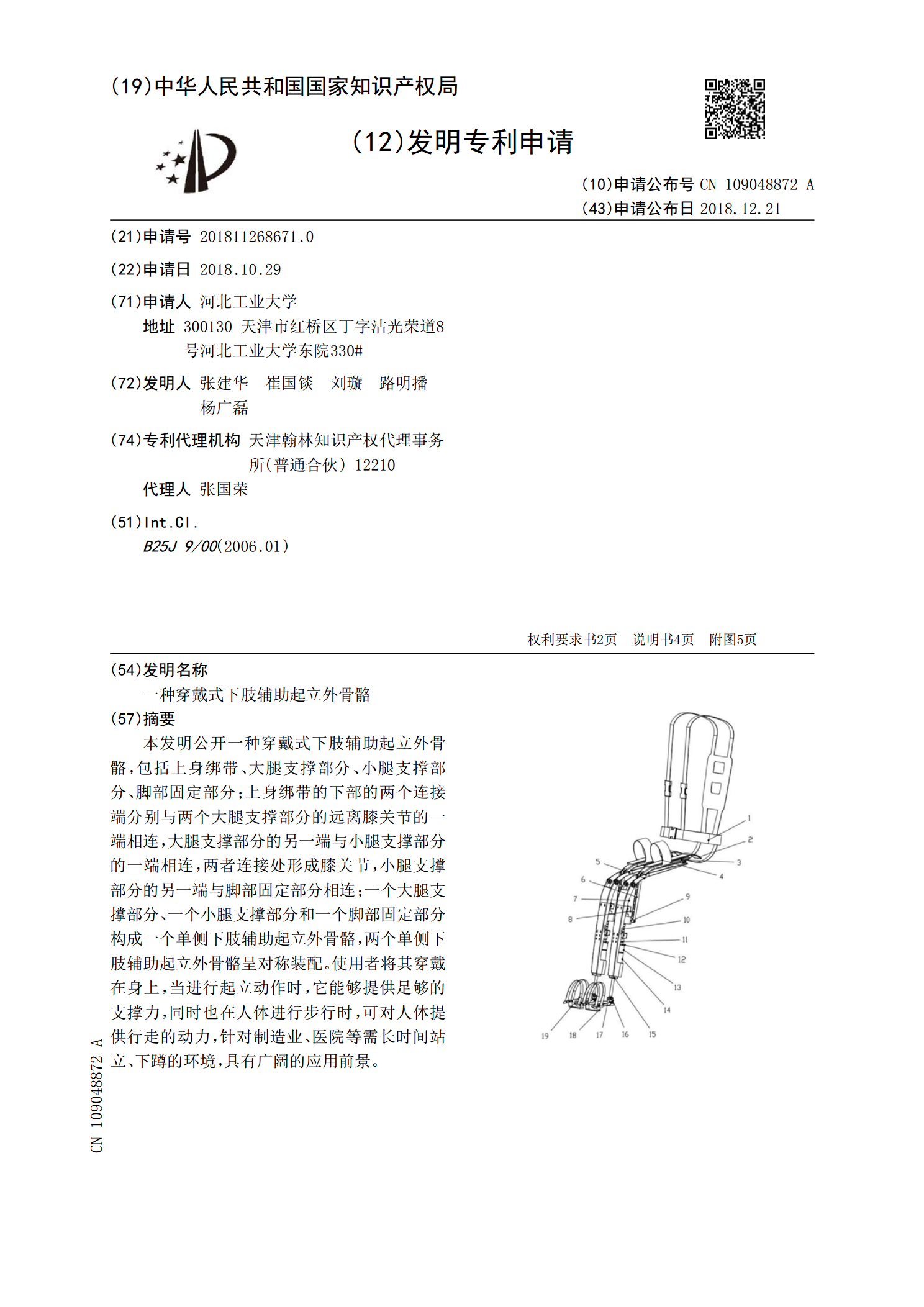
一种穿戴式下肢辅助起立外骨骼.pdf
本发明公开一种穿戴式下肢辅助起立外骨骼,包括上身绑带、大腿支撑部分、小腿支撑部分、脚部固定部分;上身绑带的下部的两个连接端分别与两个大腿支撑部分的远离膝关节的一端相连,大腿支撑部分的另一端与小腿支撑部分的一端相连,两者连接处形成膝关节,小腿支撑部分的另一端与脚部固定部分相连;一个大腿支撑部分、一个小腿支撑部分和一个脚部固定部分构成一个单侧下肢辅助起立外骨骼,两个单侧下肢辅助起立外骨骼呈对称装配。使用者将其穿戴在身上,当进行起立动作时,它能够提供足够的支撑力,同时也在人体进行步行时,可对人体提供行走的动力,