
自动扶梯扶手带速度偏差检测装置及扶手带测速保护方法.pdf

fa****楠吖

1/9
2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动扶梯扶手带速度偏差检测装置及扶手带测速保护方法.pdf
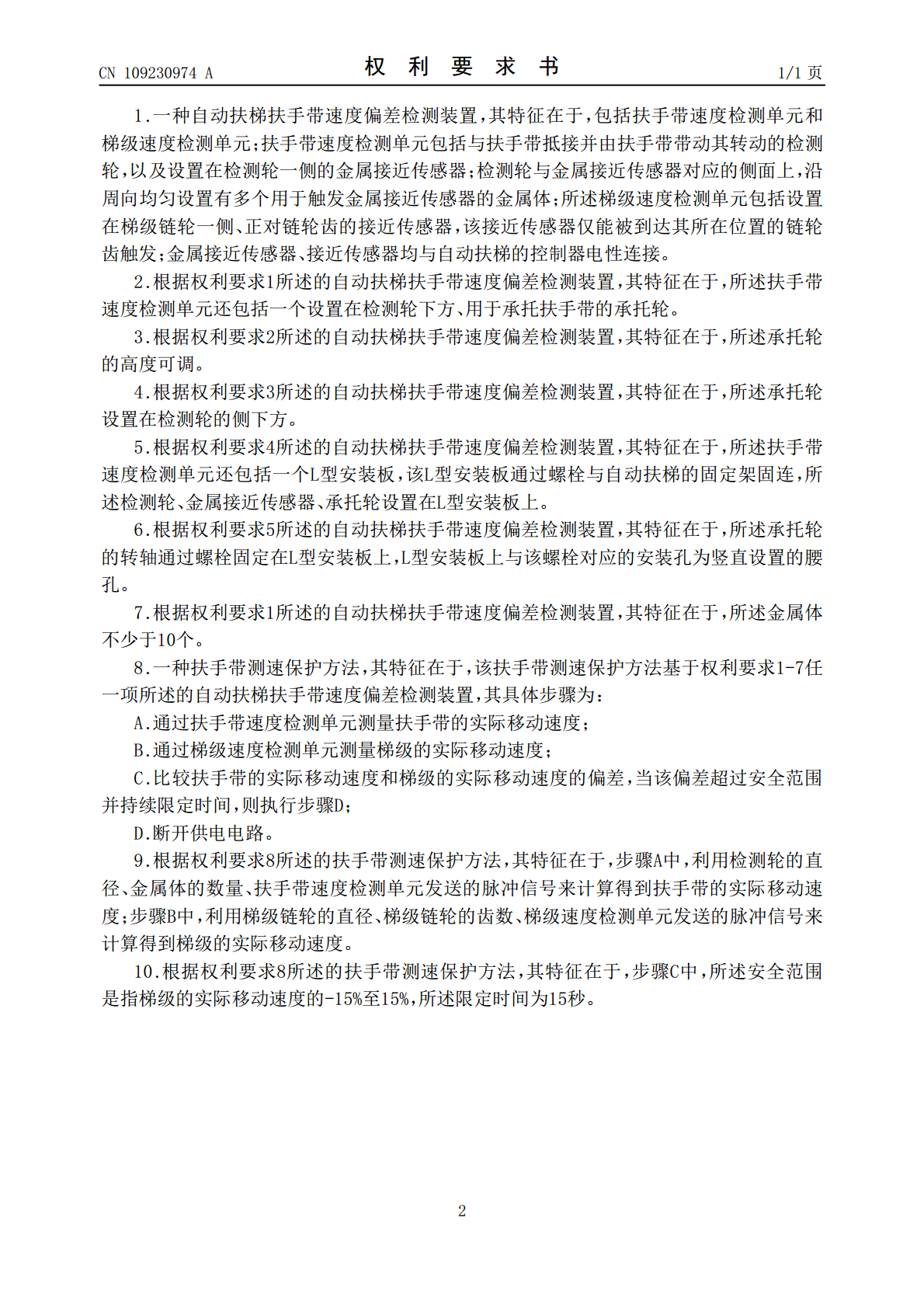
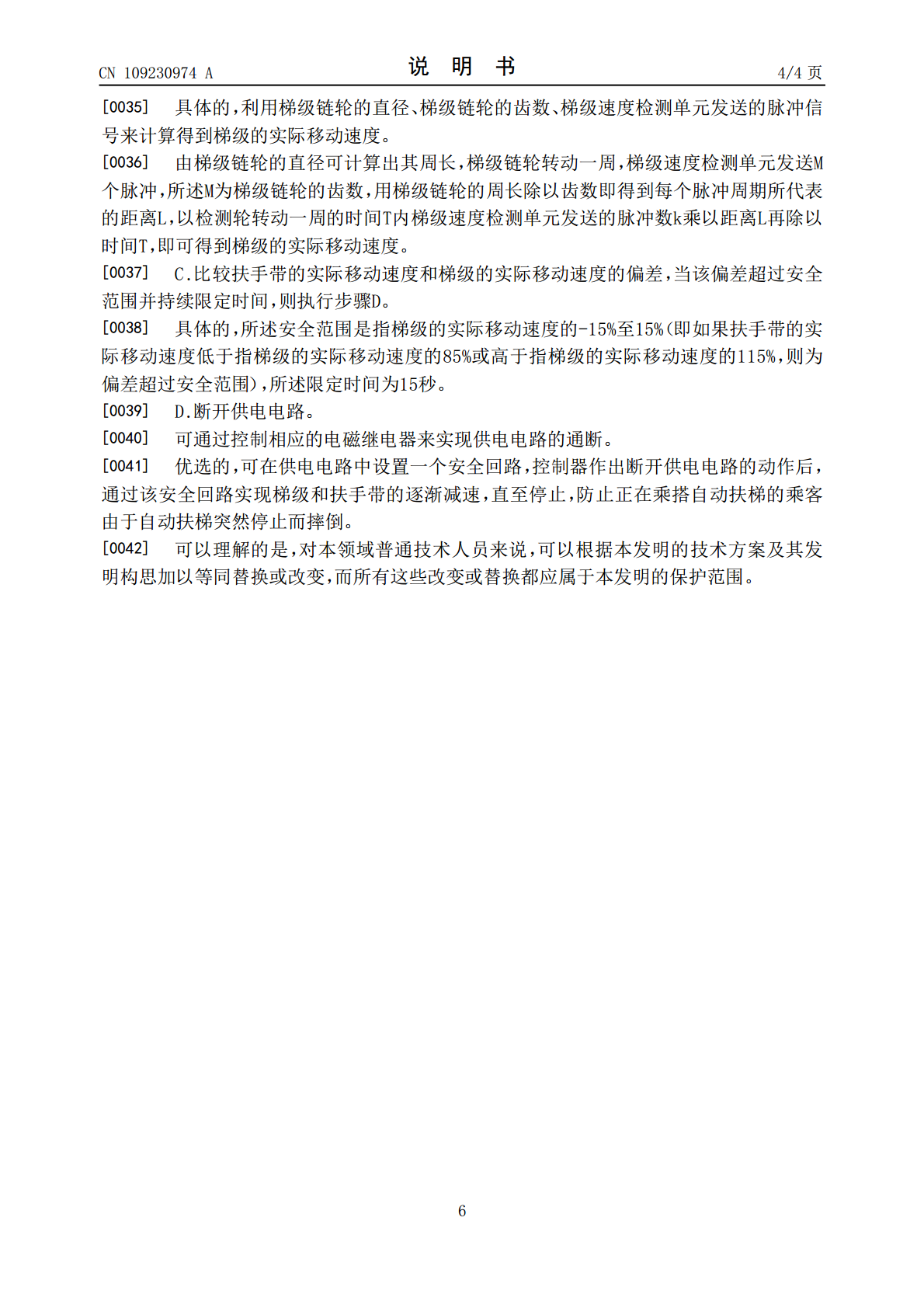
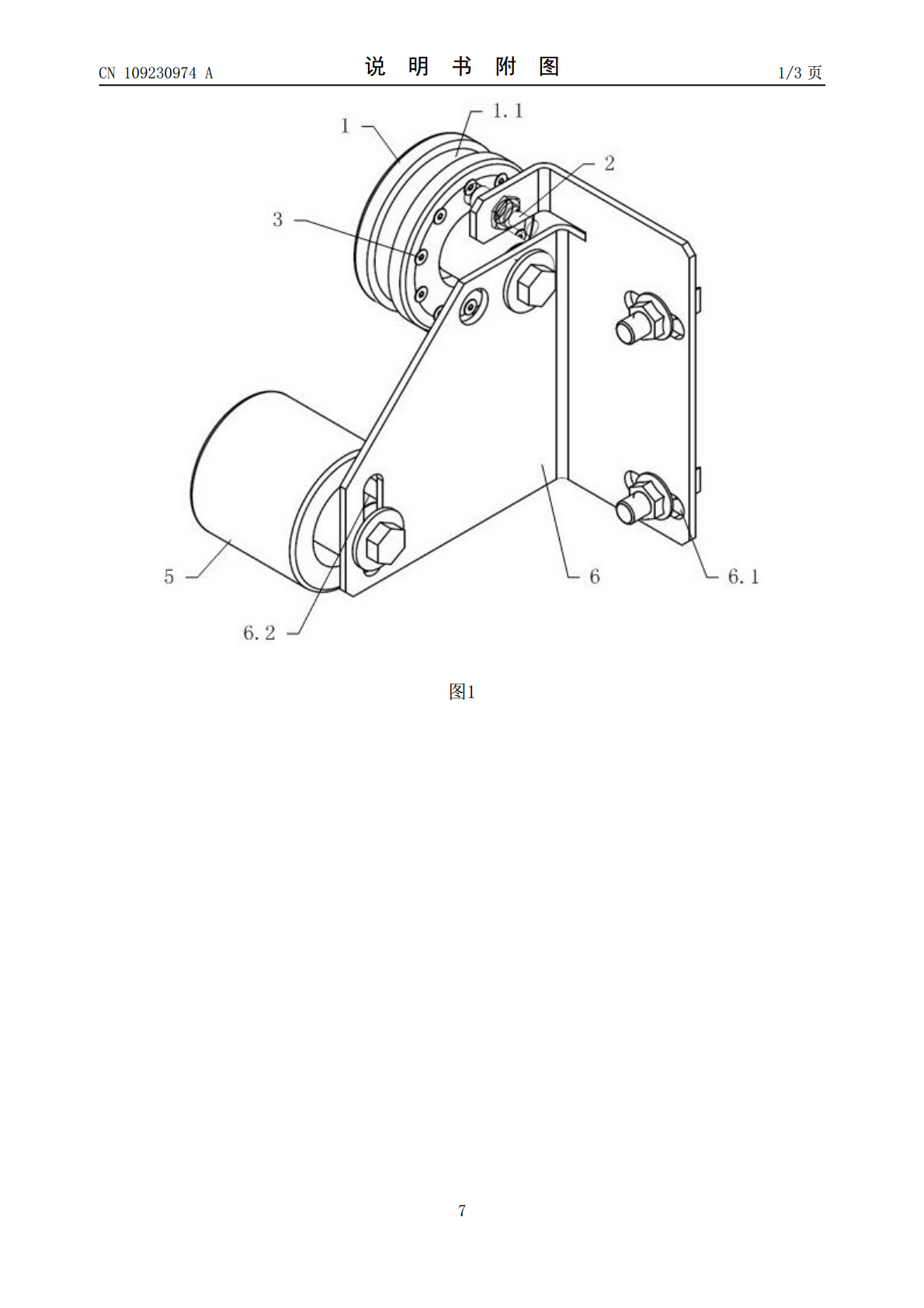
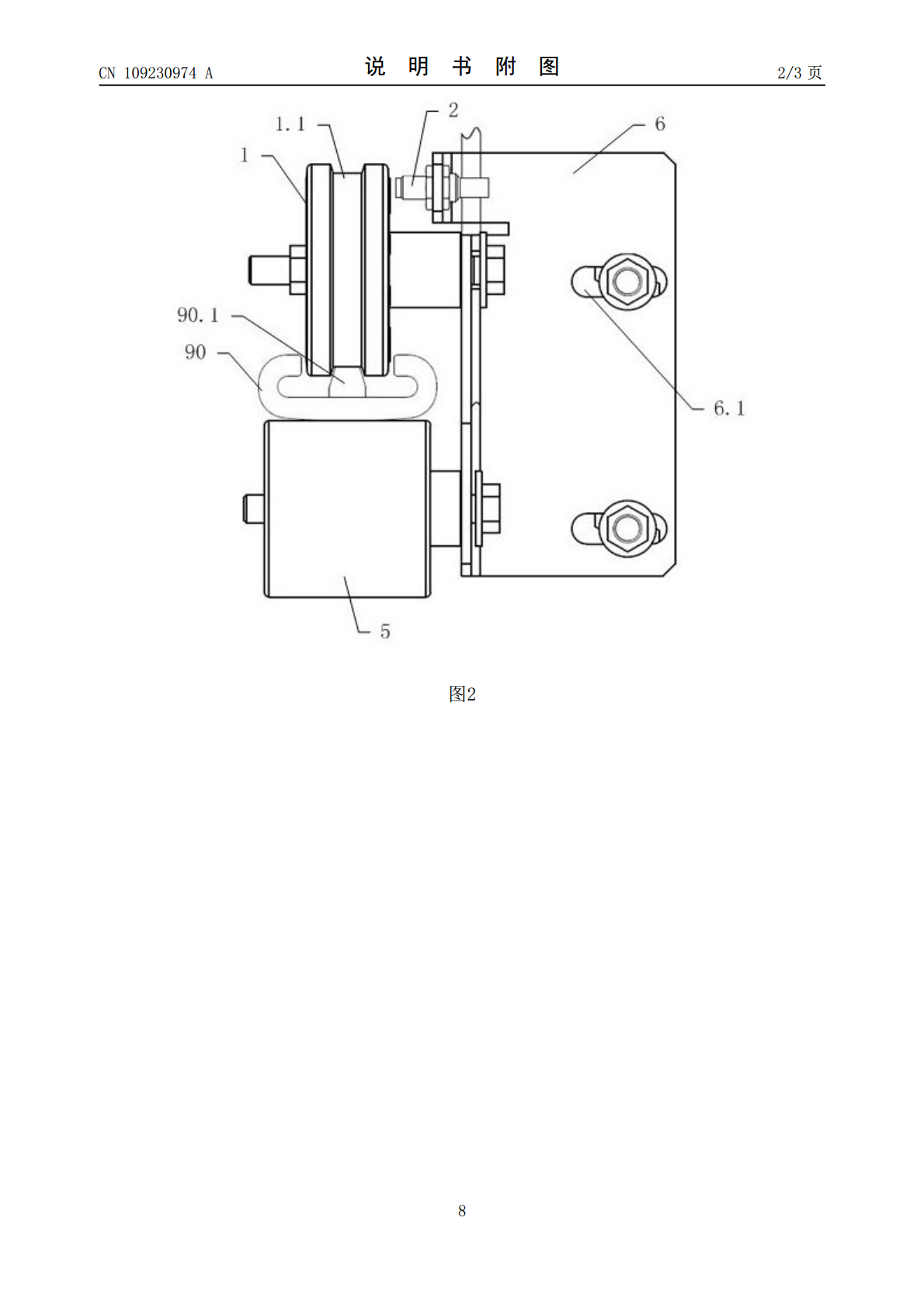
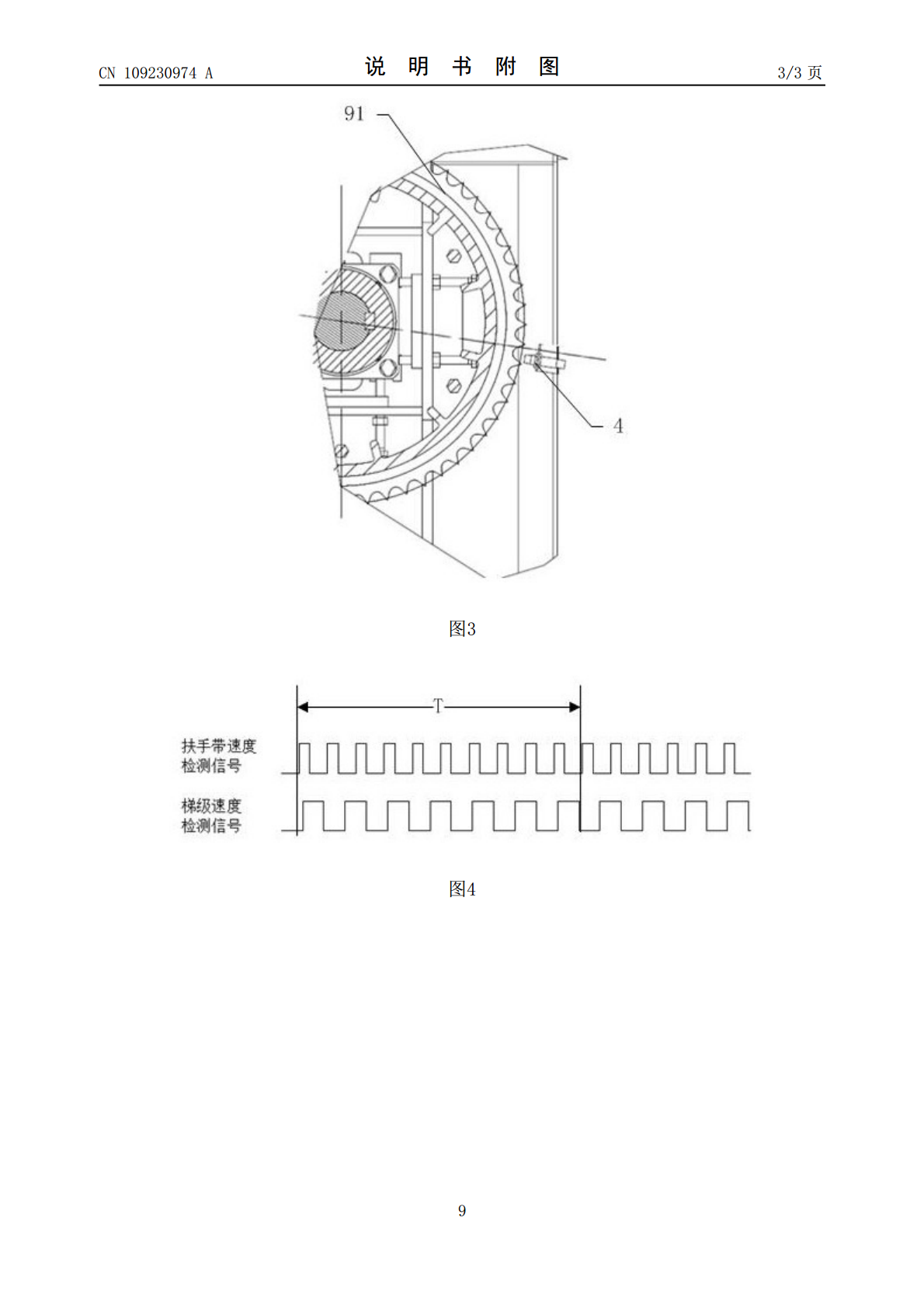
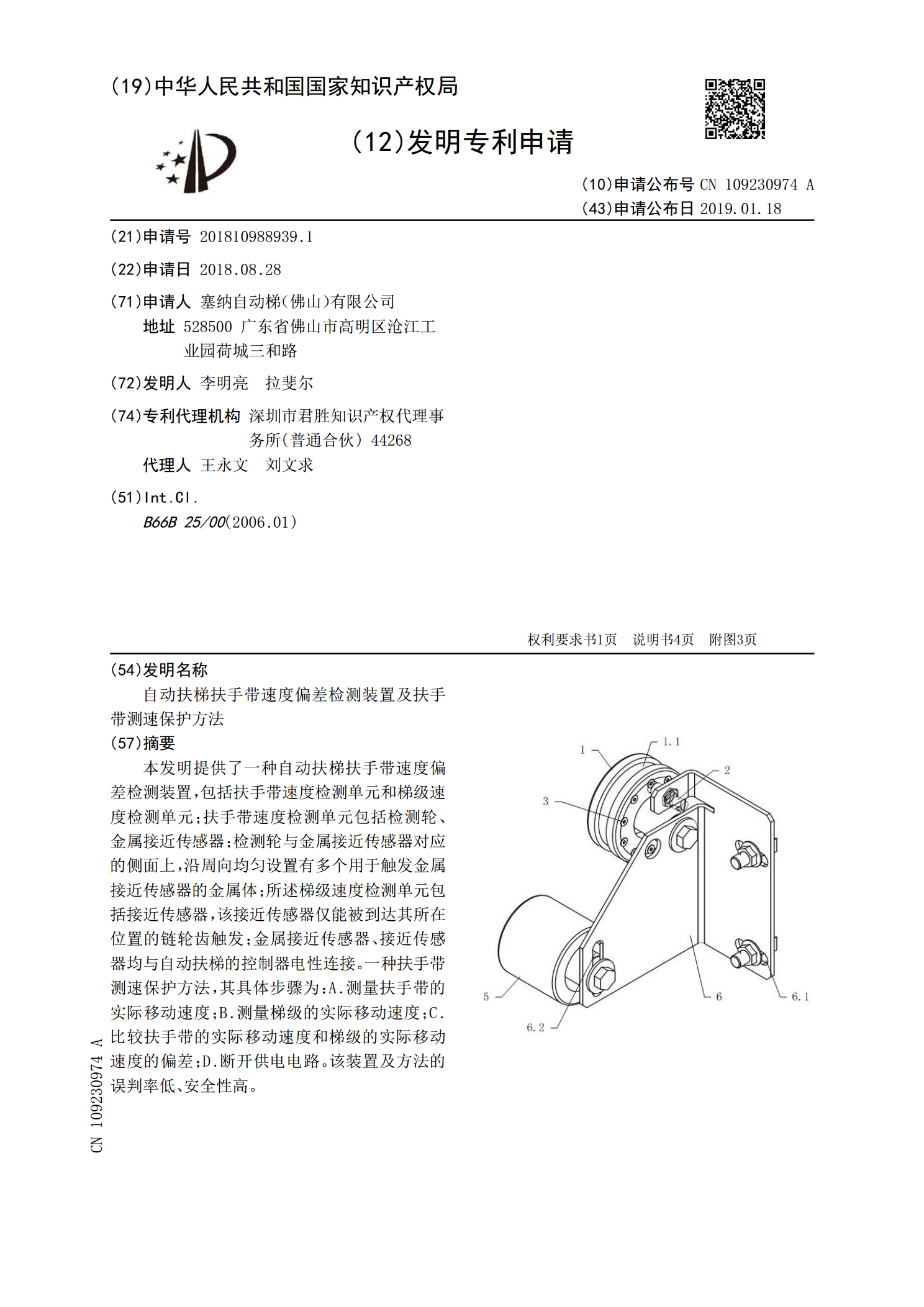
本发明提供了一种自动扶梯扶手带速度偏差检测装置,包括扶手带速度检测单元和梯级速度检测单元;扶手带速度检测单元包括检测轮、金属接近传感器;检测轮与金属接近传感器对应的侧面上,沿周向均匀设置有多个用于触发金属接近传感器的金属体;所述梯级速度检测单元包括接近传感器,该接近传感器仅能被到达其所在位置的链轮齿触发;金属接近传感器、接近传感器均与自动扶梯的控制器电性连接。一种扶手带测速保护方法,其具体步骤为:A.测量扶手带的实际移动速度;B.测量梯级的实际移动速度;C.比较扶手带的实际移动速度和梯级的实际移动速度的偏

自动扶梯的扶手带测速装置.pdf
本发明公开了一种自动扶梯的扶手带测速装置,其中扶手带抵压在测速滚轮的轮周表面上,扶手带运动时,测速滚轮会随之转动,故扶手带的运动速度能通过测速滚轮的转动速度体现出来。扶手带在运动时,带动测速滚轮旋转,测速滚轮每旋转一圈,测速探头会感应到一次感应块,测速探头会输出一个感应信号给控制系统,控制系统接收到测速探头的感应信号后,依据采集到的信号间隔时间来计算获得扶手带速度,并能够判断该扶手带速度是否正常。该扶手带测速装置结构简单,具有通用性,能应用在不同的自动扶梯上。
扶手带测速装置与扶手带导向测速系统.pdf
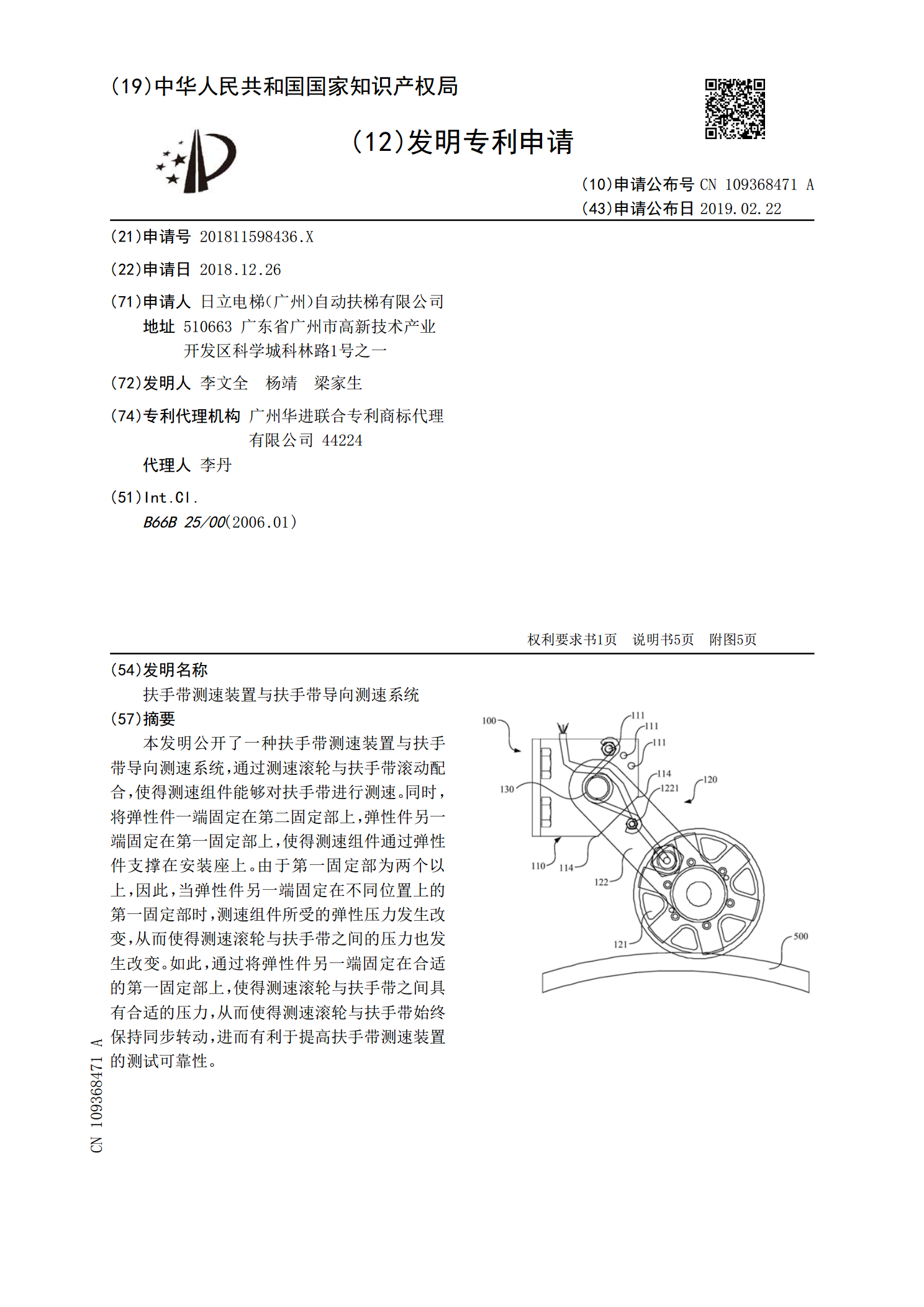
本发明公开了一种扶手带测速装置与扶手带导向测速系统,通过测速滚轮与扶手带滚动配合,使得测速组件能够对扶手带进行测速。同时,将弹性件一端固定在第二固定部上,弹性件另一端固定在第一固定部上,使得测速组件通过弹性件支撑在安装座上。由于第一固定部为两个以上,因此,当弹性件另一端固定在不同位置上的第一固定部时,测速组件所受的弹性压力发生改变,从而使得测速滚轮与扶手带之间的压力也发生改变。如此,通过将弹性件另一端固定在合适的第一固定部上,使得测速滚轮与扶手带之间具有合适的压力,从而使得测速滚轮与扶手带始终保持同步转动
一种自动扶梯扶手带速度检测装置.pdf
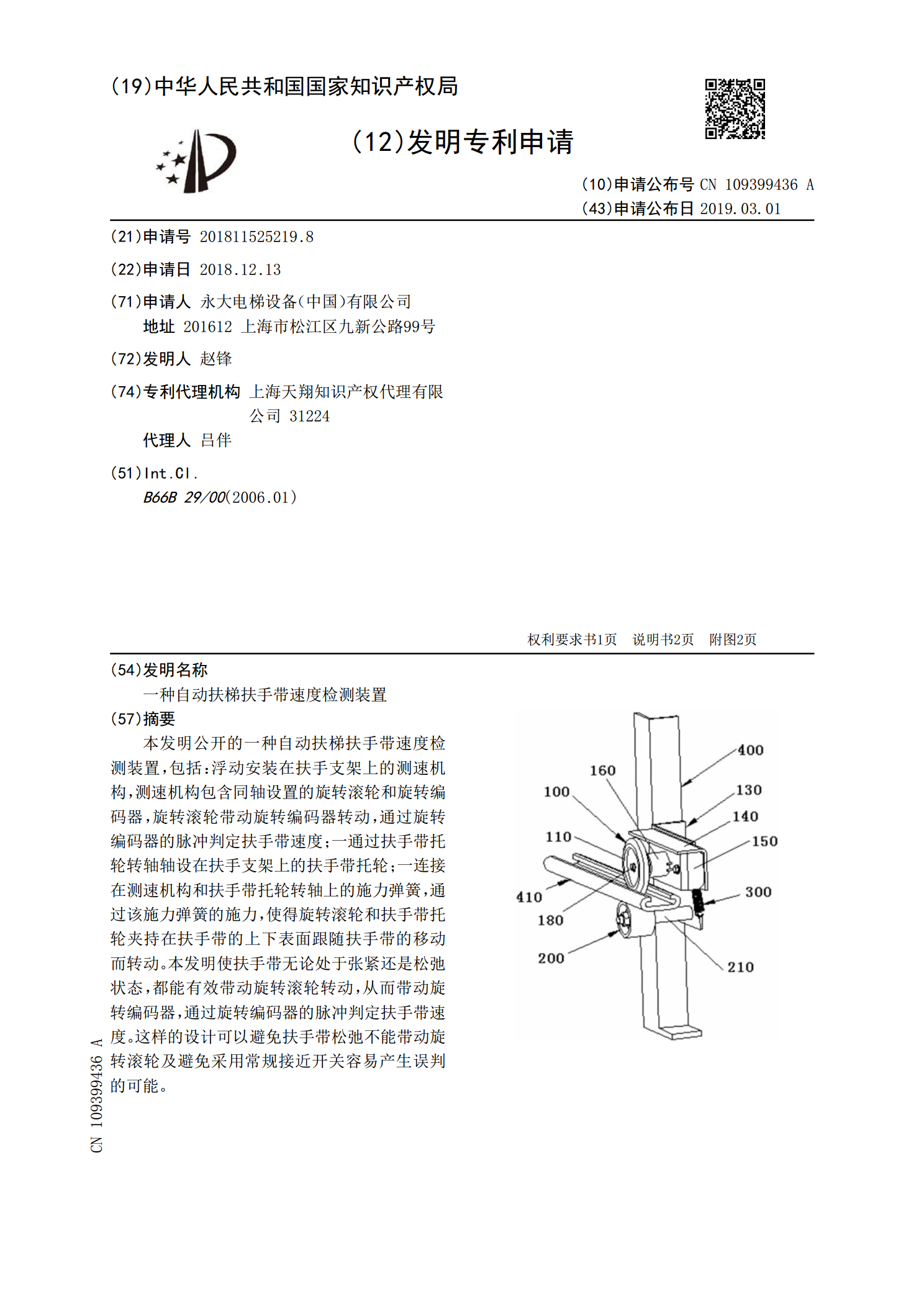
本发明公开的一种自动扶梯扶手带速度检测装置,包括:浮动安装在扶手支架上的测速机构,测速机构包含同轴设置的旋转滚轮和旋转编码器,旋转滚轮带动旋转编码器转动,通过旋转编码器的脉冲判定扶手带速度;一通过扶手带托轮转轴轴设在扶手支架上的扶手带托轮;一连接在测速机构和扶手带托轮转轴上的施力弹簧,通过该施力弹簧的施力,使得旋转滚轮和扶手带托轮夹持在扶手带的上下表面跟随扶手带的移动而转动。本发明使扶手带无论处于张紧还是松弛状态,都能有效带动旋转滚轮转动,从而带动旋转编码器,通过旋转编码器的脉冲判定扶手带速度。这样的设计

自动扶梯或自动人行道的扶手带测速装置.pdf
本发明公开了自动扶梯或自动人行道的扶手带测速装置,其中支板转动设置在固定底板上,非金属测速轮装在支板的一端部上,支板的另一端部与固定底板之间有弹性件,这样测速轮在扶手带的紧边运行时,测速轮受紧边扶手带的压力在支板上向下转动,避免测速轮受力过大容易损坏,同时依靠弹性件的弹性作用力保证紧边扶手带紧密地压在测速轮的轮周面上;测速轮在扶手带的松边运行时,测速轮受力减弱,则在弹性件的弹性回复力作用下,测速轮在支板上向上转动使得松边扶手带也能够紧密地压在测速轮的轮周面上,这样测速轮根据扶手带的运行轨迹能够自动调整高度