
背负式激光导航AGV.pdf

运升****魔王

1/6

2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

背负式激光导航AGV.pdf
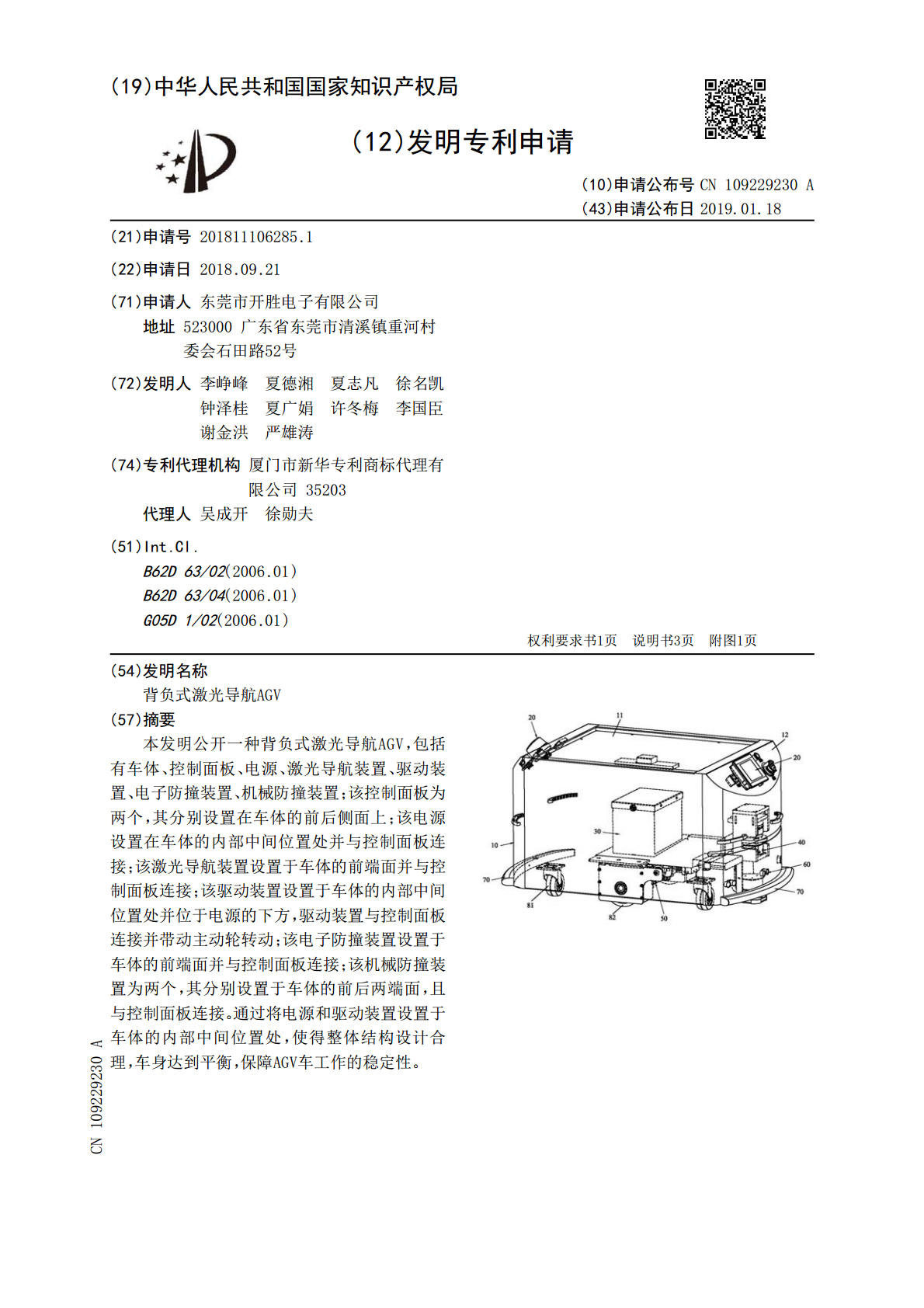
本发明公开一种背负式激光导航AGV,包括有车体、控制面板、电源、激光导航装置、驱动装置、电子防撞装置、机械防撞装置;该控制面板为两个,其分别设置在车体的前后侧面上;该电源设置在车体的内部中间位置处并与控制面板连接;该激光导航装置设置于车体的前端面并与控制面板连接;该驱动装置设置于车体的内部中间位置处并位于电源的下方,驱动装置与控制面板连接并带动主动轮转动;该电子防撞装置设置于车体的前端面并与控制面板连接;该机械防撞装置为两个,其分别设置于车体的前后两端面,且与控制面板连接。通过将电源和驱动装置设置于车体的

一种背负式AGV.pdf
本发明涉及一种背负式AGV,包括车体和位于该车体内的升举机构,该升举机构包括电机和与电机相连的减速机,该减速机上的串联轴两端分别与第一链条和第二链条一端相连,该第一链条和第二链条的另一端分别与该车体前后的第一升举组件、第二升举组件相连,该第一升举组件和第二升举组件用于在该第一链条和第二链条的驱动下同步旋转,以使各组件的凸轮同步升举位于该机构上方的升举平台。本发明实施例的优点在于,通过车体前后的升举组件实现对较大负载面积货物的升举,使得背负式AGV不仅可以运输较大负载面积的货物,而且可以升举这些较大负载面积

背负机器人式AGV小车.pdf
本发明公开了一种背负机器人式AGV小车;包括车架、机器人、电缸夹具、轮驱动机构、万向脚轮、充电接触板、安全触边、电池、控制电路板、磁导航传感器、RFID读写器、激光扫描器;所述的车架的底面安装有轮驱动机构、万向脚轮、磁导航传感器和RFID读写器,在车架的前后两端上皆安装有激光扫描器和安全触边,电池和控制电路板皆安装在车架内,充电接触板安装在车架的一侧,机器人固定安装在车架顶面,电缸夹具安装在机器人的自由端。由于本发明采用轮驱动机构与万向脚轮配合,实现前进、后退、侧移、旋转等动作,车架上的机器人可对区域物件
一种背负式的AGV搬运车.pdf
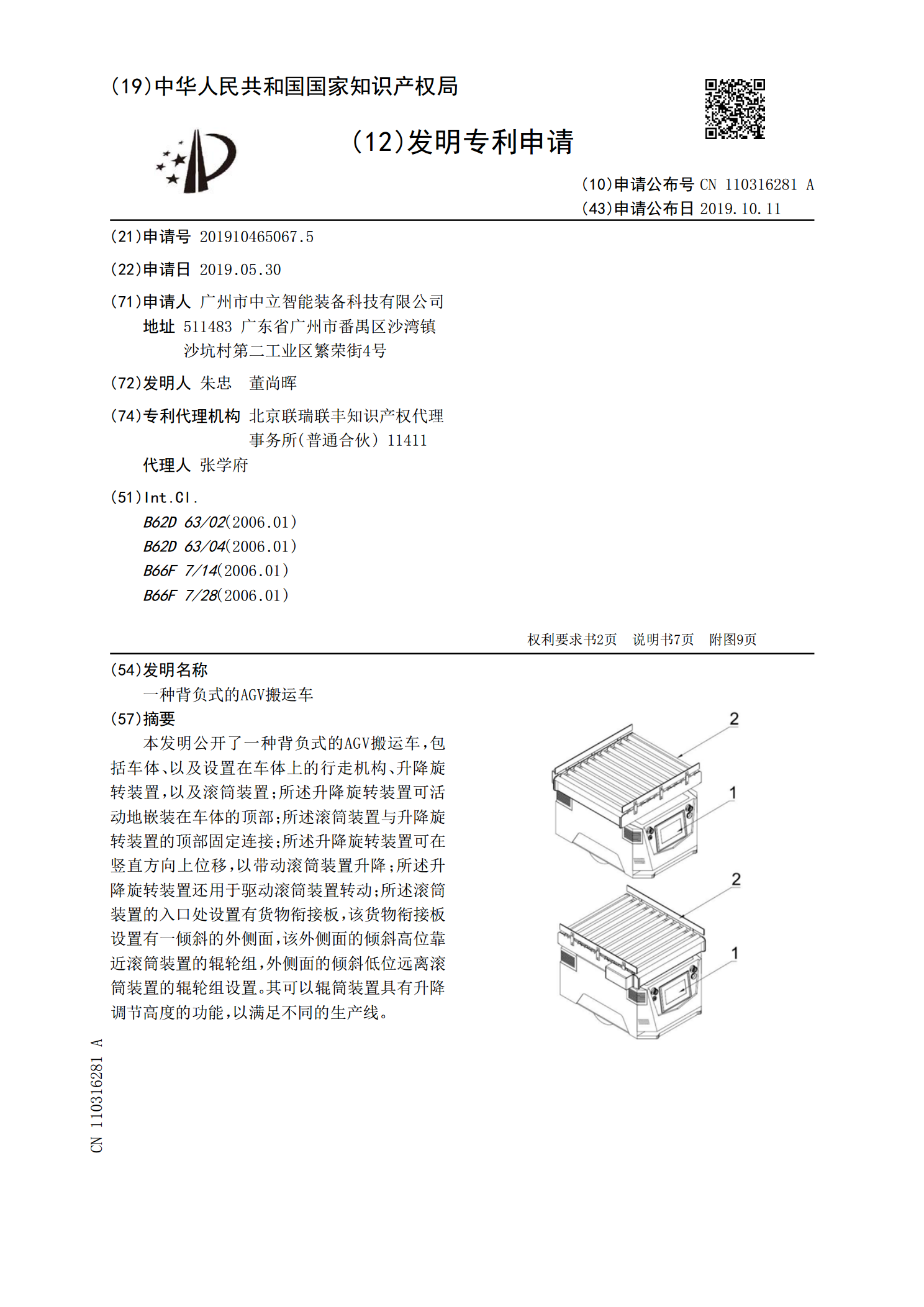
本发明公开了一种背负式的AGV搬运车,包括车体、以及设置在车体上的行走机构、升降旋转装置,以及滚筒装置;所述升降旋转装置可活动地嵌装在车体的顶部;所述滚筒装置与升降旋转装置的顶部固定连接;所述升降旋转装置可在竖直方向上位移,以带动滚筒装置升降;所述升降旋转装置还用于驱动滚筒装置转动;所述滚筒装置的入口处设置有货物衔接板,该货物衔接板设置有一倾斜的外侧面,该外侧面的倾斜高位靠近滚筒装置的辊轮组,外侧面的倾斜低位远离滚筒装置的辊轮组设置。其可以辊筒装置具有升降调节高度的功能,以满足不同的生产线。

滑移式AGV导航小车.pdf
本发明涉及一种滑移式AGV导航小车,包括主机架、双皮带轮驱动装置、地轮驱动装置、直流伺服电机、蓄电池、PGV颜色识别传感器、障碍物识别传感器;双皮带轮驱动装置左右对称的设置于主机架的中间位置,连接于主机架内的两个直流伺服电机分别与两个双皮带轮驱动装置构成传动连接;地轮驱动装置包括左前轮、右前轮、左后轮和右后轮,左前轮和左后轮为同向同步转动,右前轮和右后轮为同步同向转动;利用双同步带轮及减速支承结构实现了AGV的传动结构,使AGV具有机械式自适应四驱的能力。同时,应用颜色识别传感器来实现颜色导航、二维码定位