
一种共轴双旋翼飞行器及其飞行控制方法.pdf

是湛****21

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种共轴双旋翼飞行器及其飞行控制方法.pdf
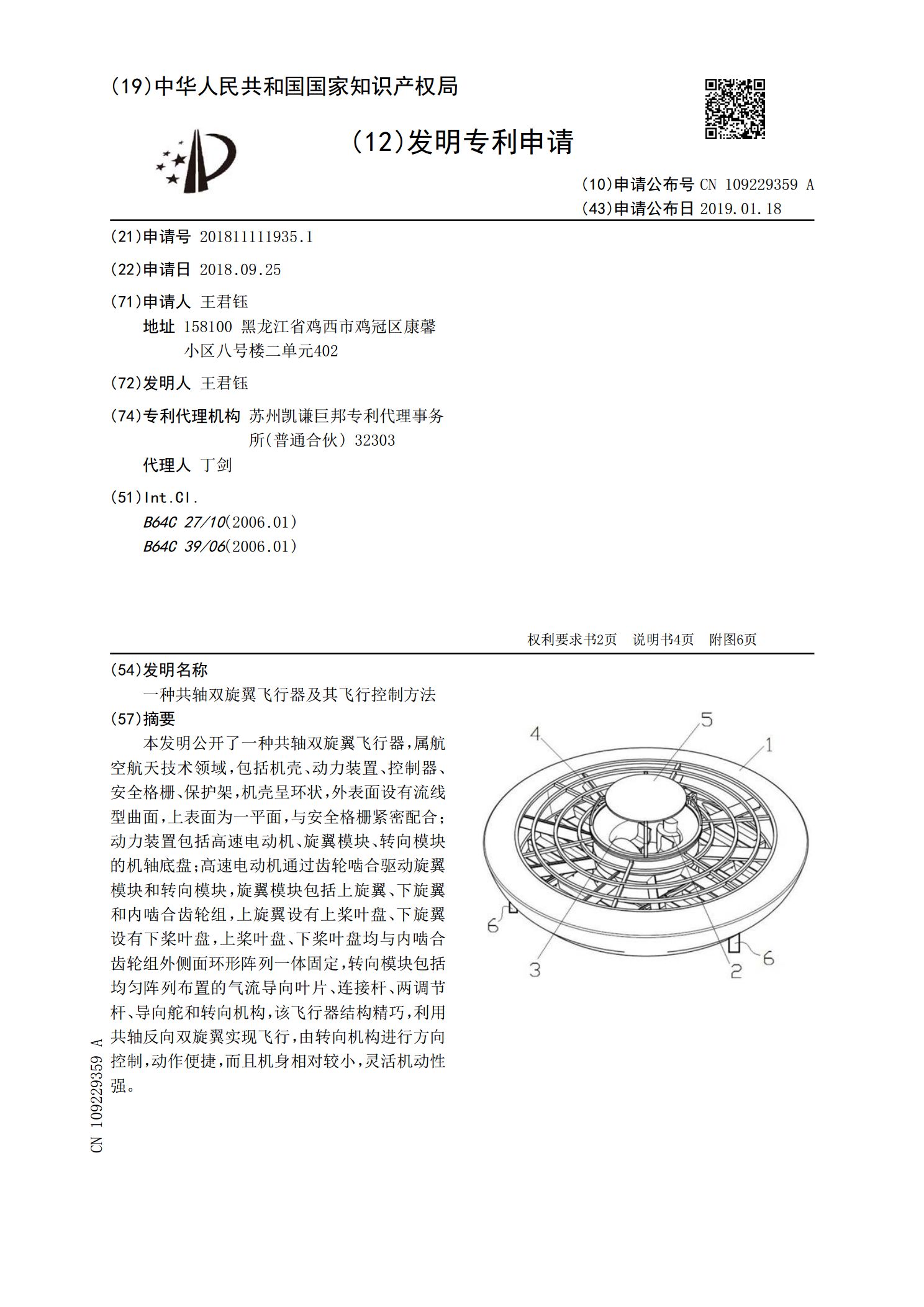
本发明公开了一种共轴双旋翼飞行器,属航空航天技术领域,包括机壳、动力装置、控制器、安全格栅、保护架,机壳呈环状,外表面设有流线型曲面,上表面为一平面,与安全格栅紧密配合;动力装置包括高速电动机、旋翼模块、转向模块的机轴底盘;高速电动机通过齿轮啮合驱动旋翼模块和转向模块,旋翼模块包括上旋翼、下旋翼和内啮合齿轮组,上旋翼设有上桨叶盘、下旋翼设有下桨叶盘,上桨叶盘、下桨叶盘均与内啮合齿轮组外侧面环形阵列一体固定,转向模块包括均匀阵列布置的气流导向叶片、连接杆、两调节杆、导向舵和转向机构,该飞行器结构精巧,利用共

变质心共轴双旋翼飞行器及其控制方法.pdf
本发明涉及共轴旋翼无人飞行器技术领域,特别涉及一种变质心共轴双旋翼飞行器及其控制方法,包括了壳体、飞行驱动、支撑架和若干质心调节装置,质心调节装置包括变质心驱动组件和滑块;支撑架设置在壳体的内侧,飞行驱动分别设置在支撑架的上下两端,变质心驱动组件设置在支撑架上,并且变质心驱动组件位于支撑架上下两端的飞行驱动之间,滑块设置在支撑架上,并且滑块与变质心驱动组件活动连接;通过改变质心的位置来控制飞行器的姿态,无需依靠周期变距,通过变质心驱动组件调节滑块的位置来改变飞行器质心位置,从而使得飞行器所受的合力矩改变,
一种共轴双桨八旋翼飞行器.pdf
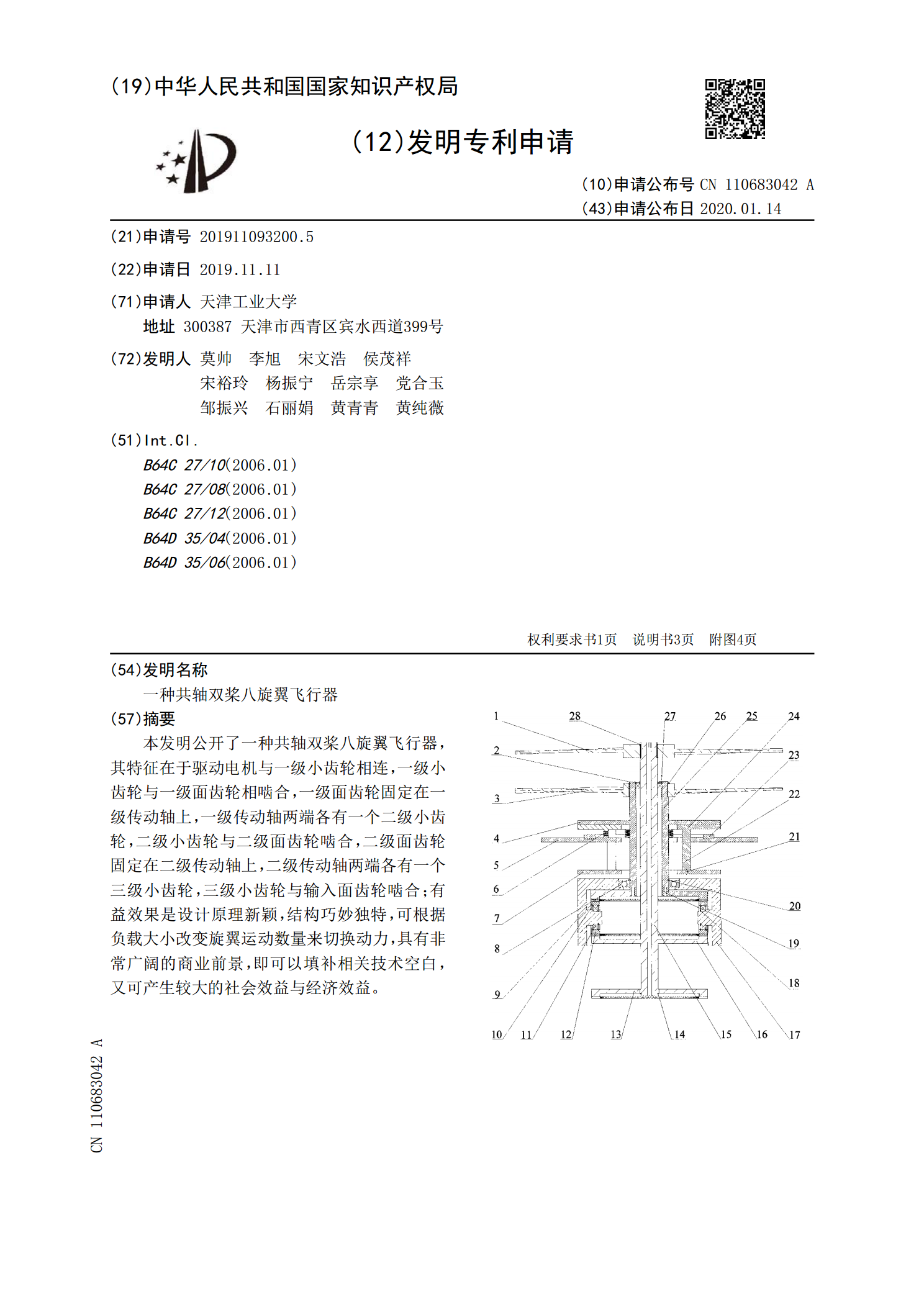
本发明公开了一种共轴双桨八旋翼飞行器,其特征在于驱动电机与一级小齿轮相连,一级小齿轮与一级面齿轮相啮合,一级面齿轮固定在一级传动轴上,一级传动轴两端各有一个二级小齿轮,二级小齿轮与二级面齿轮啮合,二级面齿轮固定在二级传动轴上,二级传动轴两端各有一个三级小齿轮,三级小齿轮与输入面齿轮啮合;有益效果是设计原理新颖,结构巧妙独特,可根据负载大小改变旋翼运动数量来切换动力,具有非常广阔的商业前景,即可以填补相关技术空白,又可产生较大的社会效益与经济效益。

一种油电混合共轴双旋翼飞行器及其使用方法.pdf
一种油电混合共轴双旋翼飞行器及其使用方法,浆轴上下分别设有第一、第二支撑盘,第一、第二支撑架分别布置于第一、第二支撑盘上,上桨盘在所述第一支撑架下方套设在所述浆轴上,下桨盘在所述第二支撑架上方套设在所述浆轴上,上旋翼固定在上桨盘上表面,下旋翼固定在下桨盘下表面,用于驱动上、下旋翼的上、下旋翼电机分别通过上、下旋翼电机支撑座固定在上、下浆盘上,用于动力分配的混联式油电混合部件固定在下桨盘上表面,所述混联式油电混合部件动力连接倾斜装置和上、下旋翼电机,布置在上、下桨盘中间的倾斜装置经由球铰链连接到上桨盘,所述

基于P-PID控制器对共轴双旋翼飞行器的姿态控制.docx
基于P-PID控制器对共轴双旋翼飞行器的姿态控制共轴双旋翼飞行器是一种具有极高机动性和操控能力的无人机系统。其双旋翼结构使得其既能够以垂直模式进行垂直起降,又能够以水平模式进行快速、稳定的飞行。然而,由于其双旋翼的结构特点,共轴双旋翼飞行器容易受到风载扰动和非线性影响,导致其姿态控制困难。因此,设计一种高效可靠的姿态控制方法对于共轴双旋翼飞行器的飞行安全和稳定至关重要。P-PID控制器是一种改进的PID控制器,采用比例(P)、积分(I)和微分(D)三个控制量来调节系统,通过根据当前偏差对控制量进行比例、积