
悬停定位装置.pdf

书生****专家

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
悬停定位装置.pdf
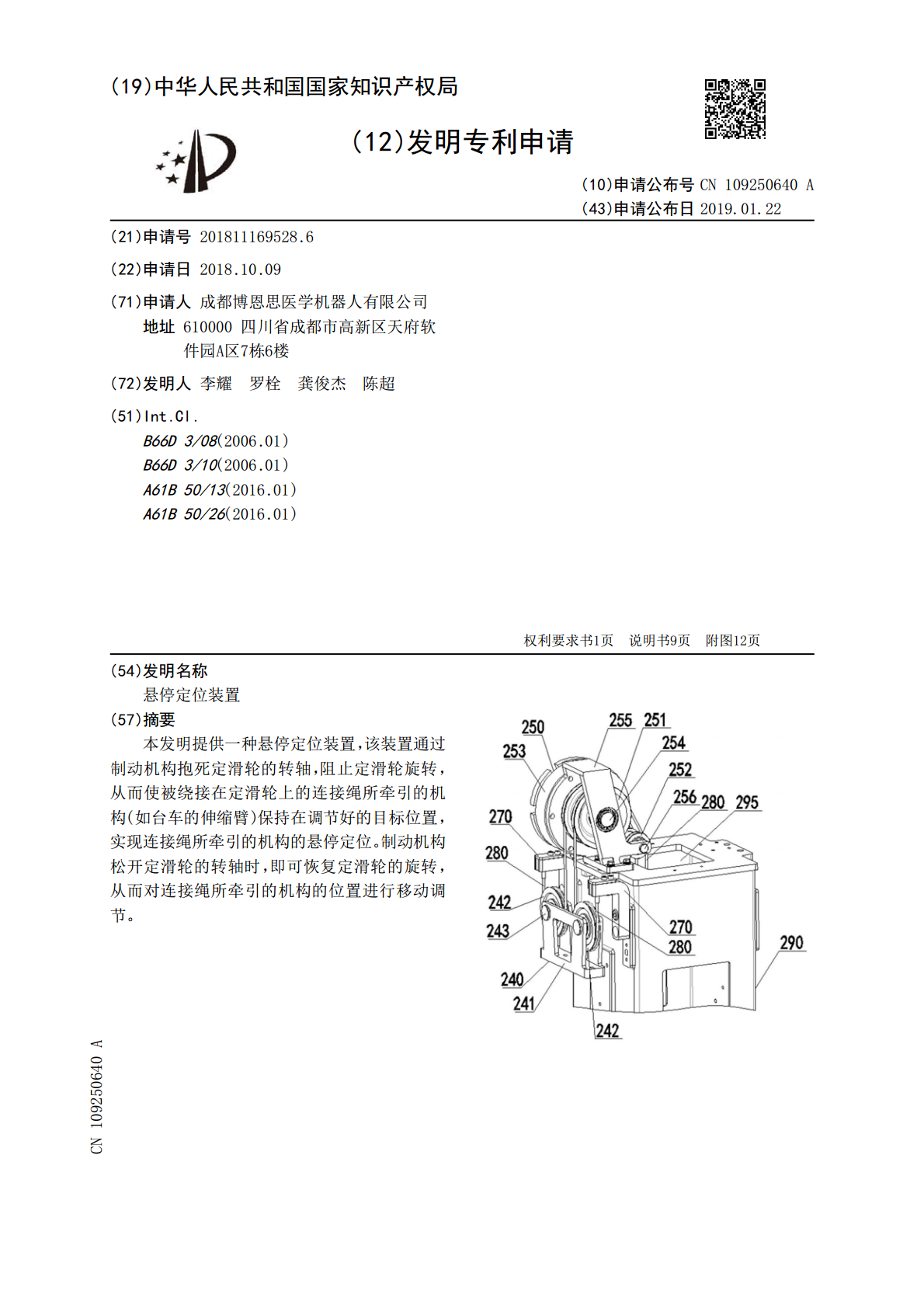
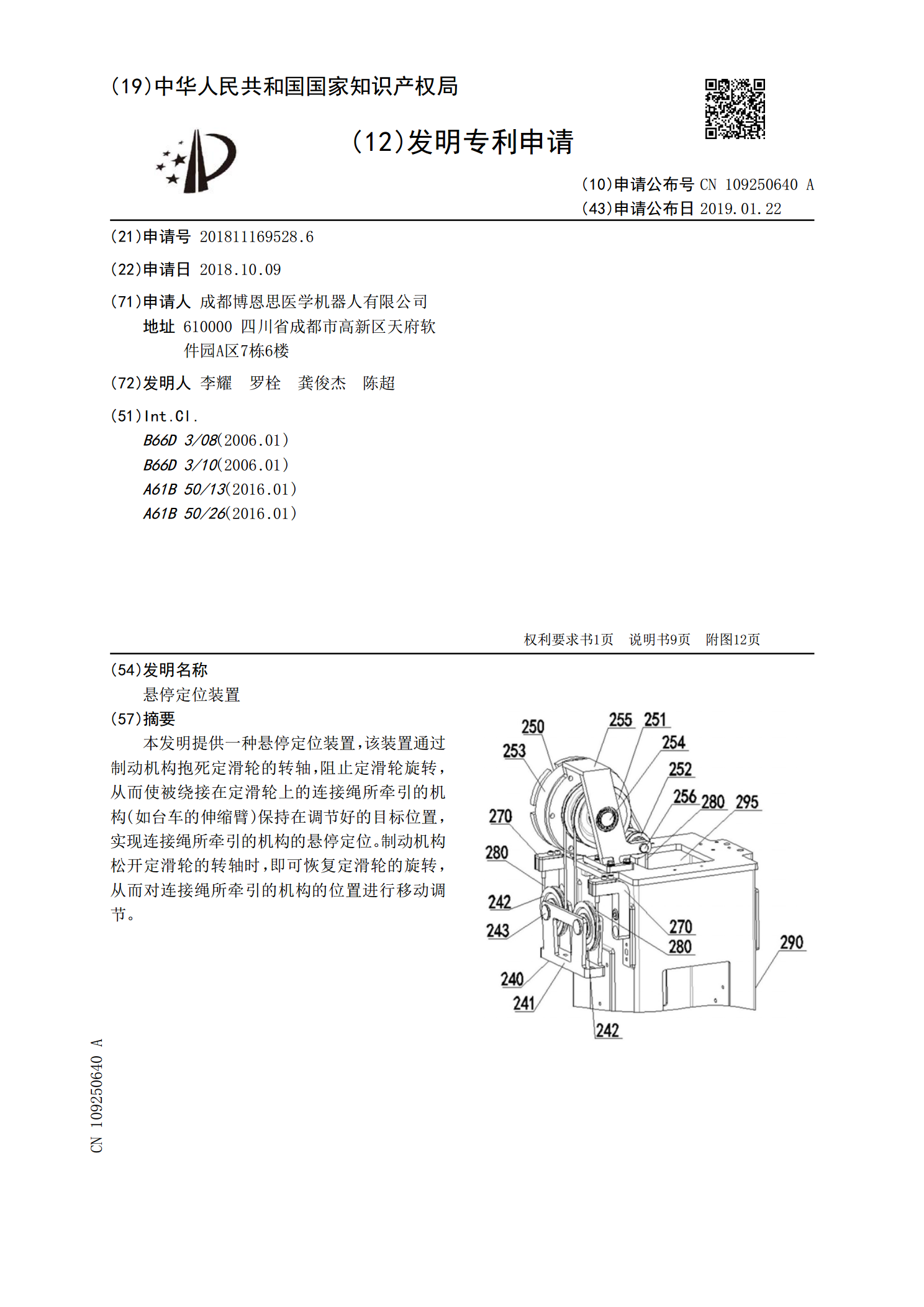
本发明提供一种悬停定位装置,该装置通过制动机构抱死定滑轮的转轴,阻止定滑轮旋转,从而使被绕接在定滑轮上的连接绳所牵引的机构(如台车的伸缩臂)保持在调节好的目标位置,实现连接绳所牵引的机构的悬停定位。制动机构松开定滑轮的转轴时,即可恢复定滑轮的旋转,从而对连接绳所牵引的机构的位置进行移动调节。

一种悬停定位装置和相关的抽拉式龙头.pdf
本发明公开了一种悬停定位装置和相关的抽拉式龙头,所述的悬停定位装置包括盒体、滚珠、转轮和靠轮;盒体包括上孔、下孔、转轮持轴单元、直线槽;转轮朝向直线槽的端面为定位面,定位面设有滚珠槽;滚珠槽设有第一弧段、第二弧段和第三弧段;滚珠分别与直线槽和滚珠槽配合,拉管或拉绳升降带动转轮转动并驱动滚珠在直线槽内直线运动。所述的抽拉式龙头采用了上述悬停定位装置。采用上述技术该案,不仅能实现抽拉式龙头在使用过程中的悬停定位,还能实现在放回时不受悬停定位的影响的功能。

导烟板定位悬停的油烟机.pdf
本发明涉及一种导烟板定位悬停的油烟机,包括油烟机的外壳、连接外壳的集烟罩及位于集烟罩前部的导烟板,集烟罩上设有安装支架,导烟板铰接在安装支架上,所述安装支架上设有对导烟板的转动开启进行定位的定位铰接机构,所述定位铰接机构包括跟随导烟板铰接转动的齿轮、齿轮限位件及驱动齿轮限位件的驱动组件。本发明通过定位铰接机构对导烟板的转动开启进行定位,实现了导烟板在任意开启角度的悬停,避免导烟板的回落,解放了用户支撑导烟板的手,便于用户清洁集烟罩,该定位铰接机构结构小巧,使用便利。
一种多位置悬停装置.pdf
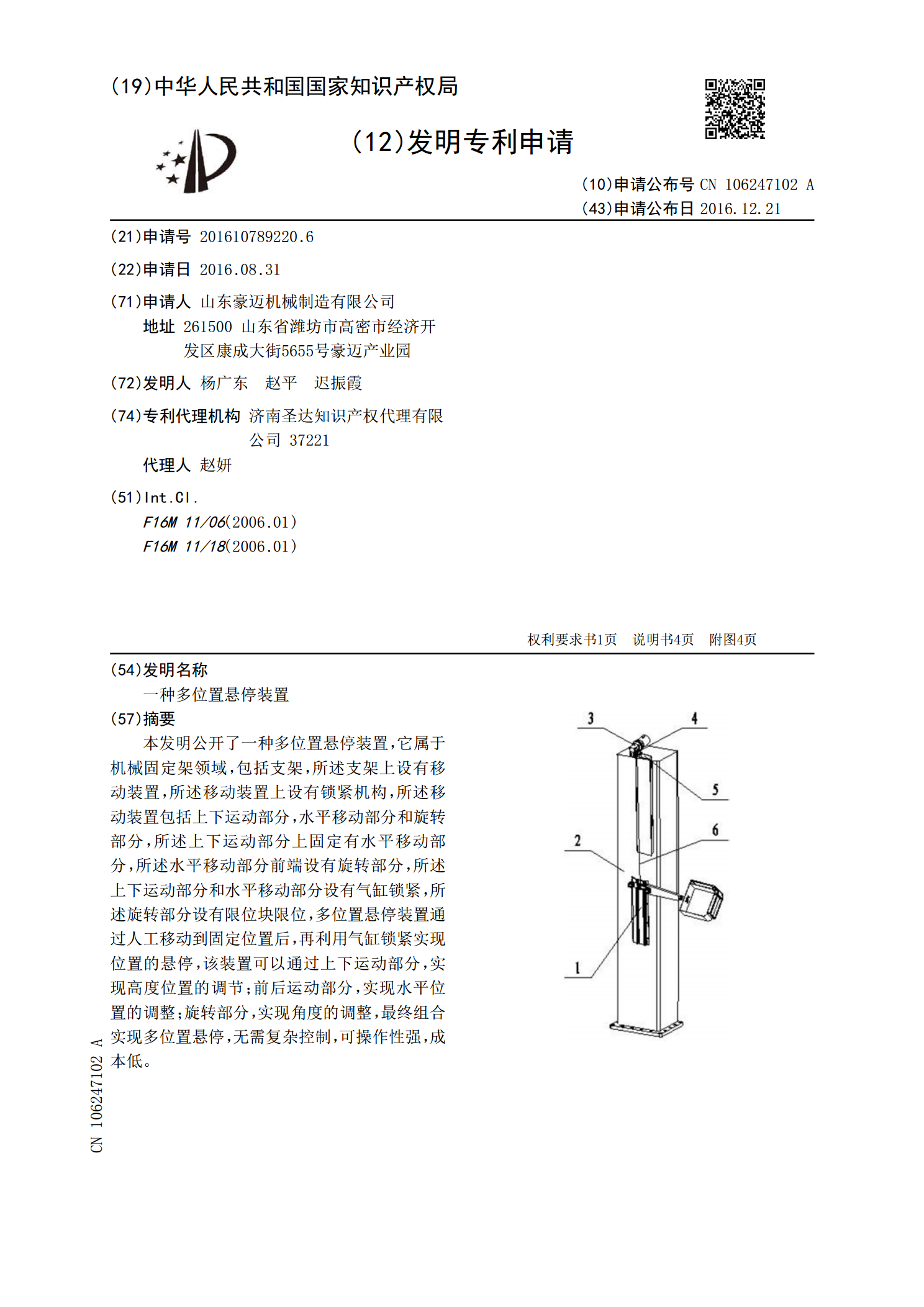
本发明公开了一种多位置悬停装置,它属于机械固定架领域,包括支架,所述支架上设有移动装置,所述移动装置上设有锁紧机构,所述移动装置包括上下运动部分,水平移动部分和旋转部分,所述上下运动部分上固定有水平移动部分,所述水平移动部分前端设有旋转部分,所述上下运动部分和水平移动部分设有气缸锁紧,所述旋转部分设有限位块限位,多位置悬停装置通过人工移动到固定位置后,再利用气缸锁紧实现位置的悬停,该装置可以通过上下运动部分,实现高度位置的调节;前后运动部分,实现水平位置的调整;旋转部分,实现角度的调整,最终组合实现多位置
一种服务器机箱悬停装置.pdf
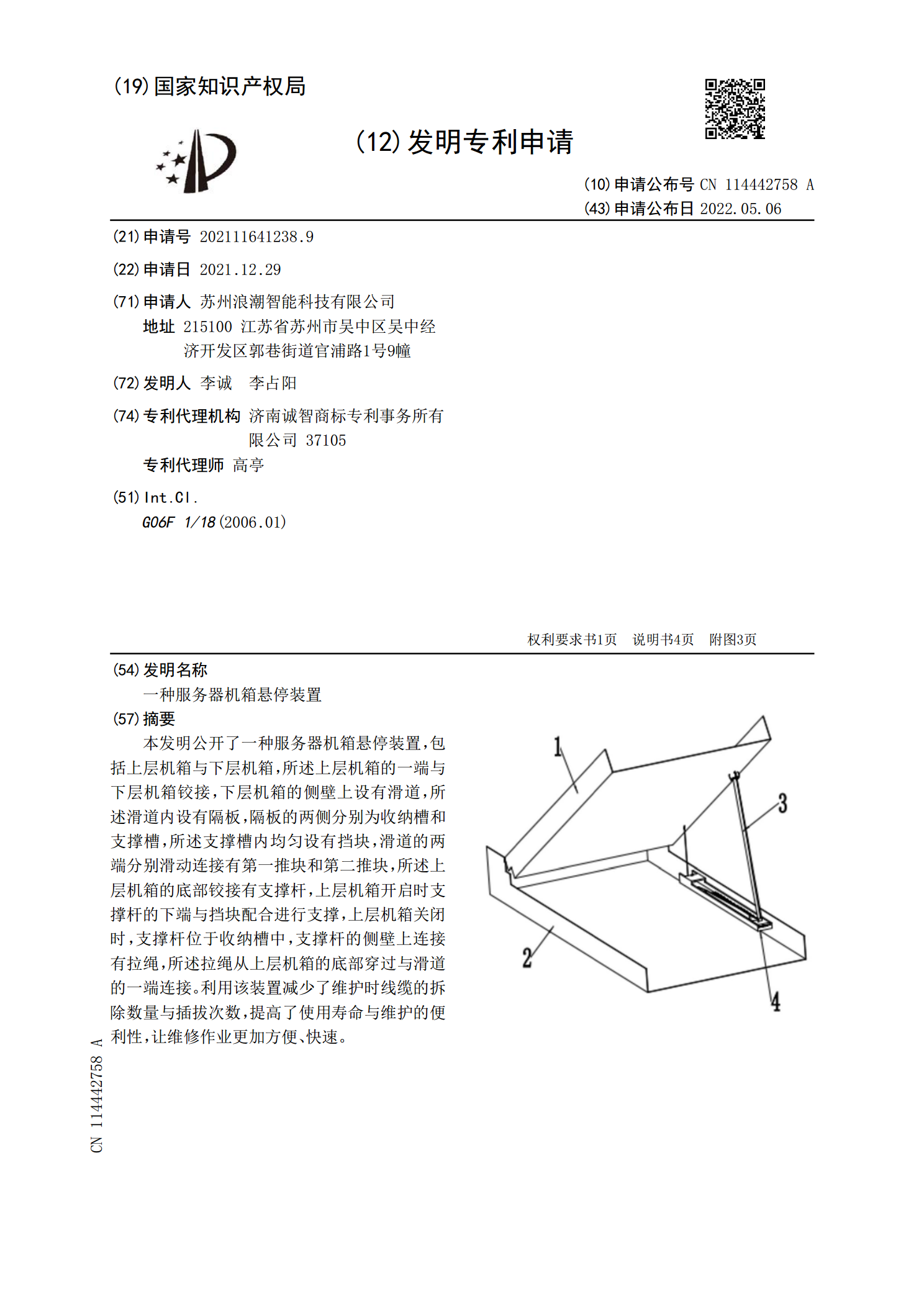
本发明公开了一种服务器机箱悬停装置,包括上层机箱与下层机箱,所述上层机箱的一端与下层机箱铰接,下层机箱的侧壁上设有滑道,所述滑道内设有隔板,隔板的两侧分别为收纳槽和支撑槽,所述支撑槽内均匀设有挡块,滑道的两端分别滑动连接有第一推块和第二推块,所述上层机箱的底部铰接有支撑杆,上层机箱开启时支撑杆的下端与挡块配合进行支撑,上层机箱关闭时,支撑杆位于收纳槽中,支撑杆的侧壁上连接有拉绳,所述拉绳从上层机箱的底部穿过与滑道的一端连接。利用该装置减少了维护时线缆的拆除数量与插拔次数,提高了使用寿命与维护的便利性,让维