
一种齿圈找正方法.pdf

努力****恨风


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种齿圈找正方法.pdf
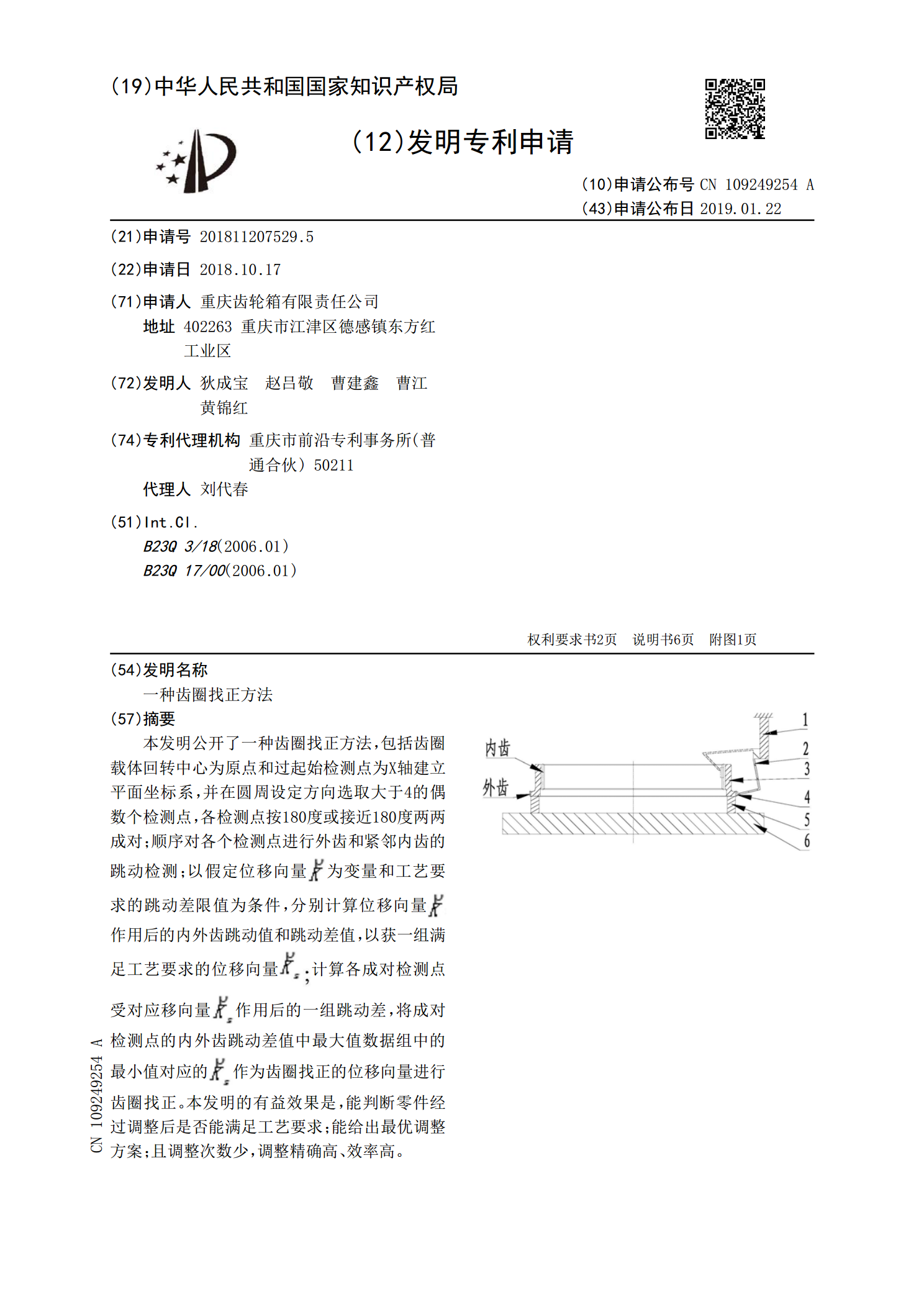
本发明公开了一种齿圈找正方法,包括齿圈载体回转中心为原点和过起始检测点为X轴建立平面坐标系,并在圆周设定方向选取大于4的偶数个检测点,各检测点按180度或接近180度两两成对;顺序对各个检测点进行外齿和紧邻内齿的跳动检测;以假定位移向量
一种磨齿机刀架A轴旋转中心找正装置及找正方法.pdf
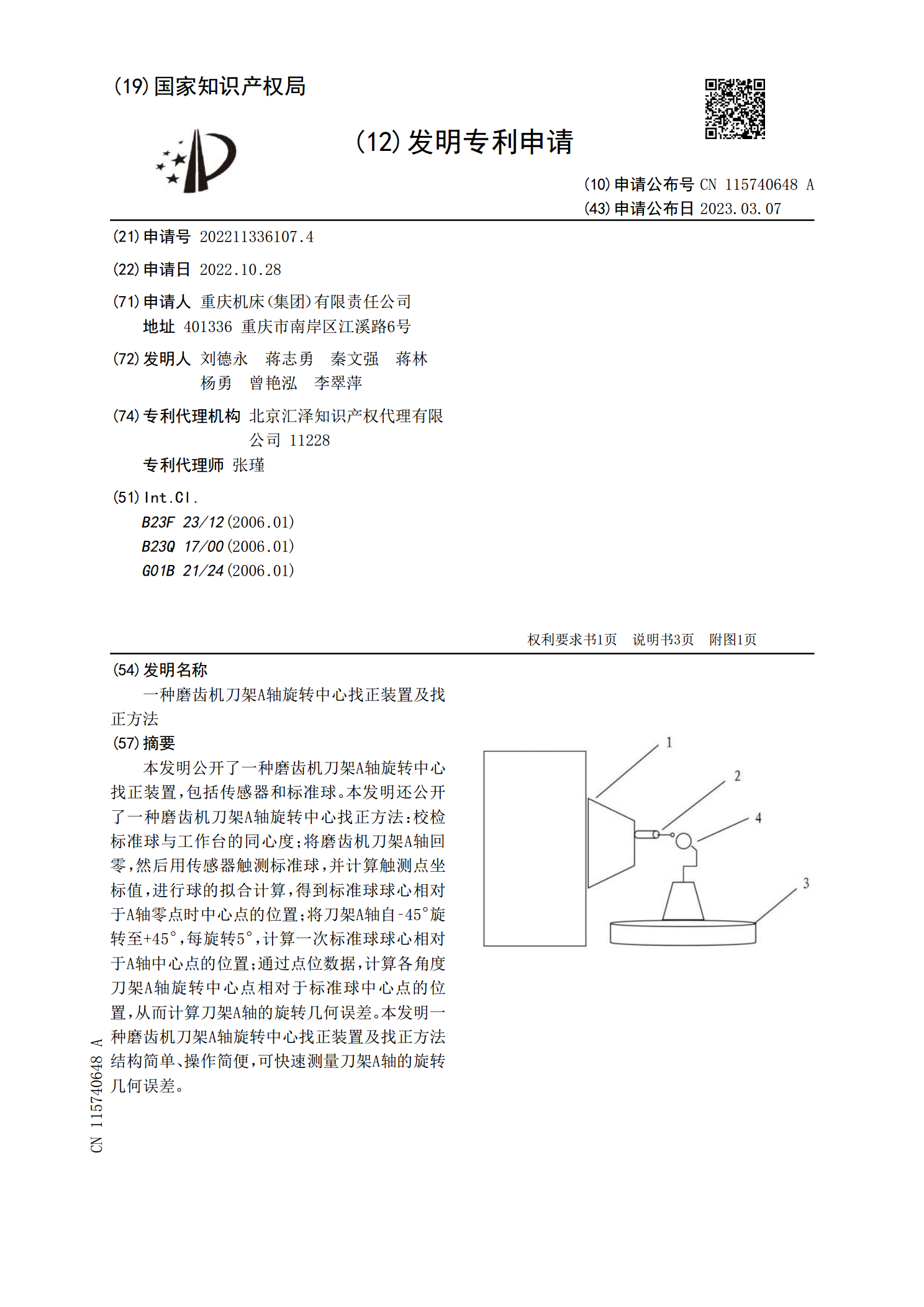
本发明公开了一种磨齿机刀架A轴旋转中心找正装置,包括传感器和标准球。本发明还公开了一种磨齿机刀架A轴旋转中心找正方法:校检标准球与工作台的同心度;将磨齿机刀架A轴回零,然后用传感器触测标准球,并计算触测点坐标值,进行球的拟合计算,得到标准球球心相对于A轴零点时中心点的位置;将刀架A轴自‑45°旋转至+45°,每旋转5°,计算一次标准球球心相对于A轴中心点的位置;通过点位数据,计算各角度刀架A轴旋转中心点相对于标准球中心点的位置,从而计算刀架A轴的旋转几何误差。本发明一种磨齿机刀架A轴旋转中心找正装置及找正

一种人字齿齿圈的安装方法.pdf
本发明涉公开了一种人字齿齿圈的安装方法,在上齿圈、下齿圈和固定套的安装过程中始终通过支撑工装支撑上齿圈、下齿圈和固定套的重量,避免安装过程中齿圈和固定套的重量集中在行星轮和人字齿齿圈的啮合齿上;上齿圈安装在行星轮组上后,通过调整顶起工装和定位标记能够快速的调整上齿圈和下齿圈之间的相对位置,使行星轮、上齿圈和下齿圈保证最佳的啮合状态,保证后续运转中行星轮组件和齿圈的稳定与安全,提高装配效率和成功率。
一种磨齿机加工快速找正装置.pdf
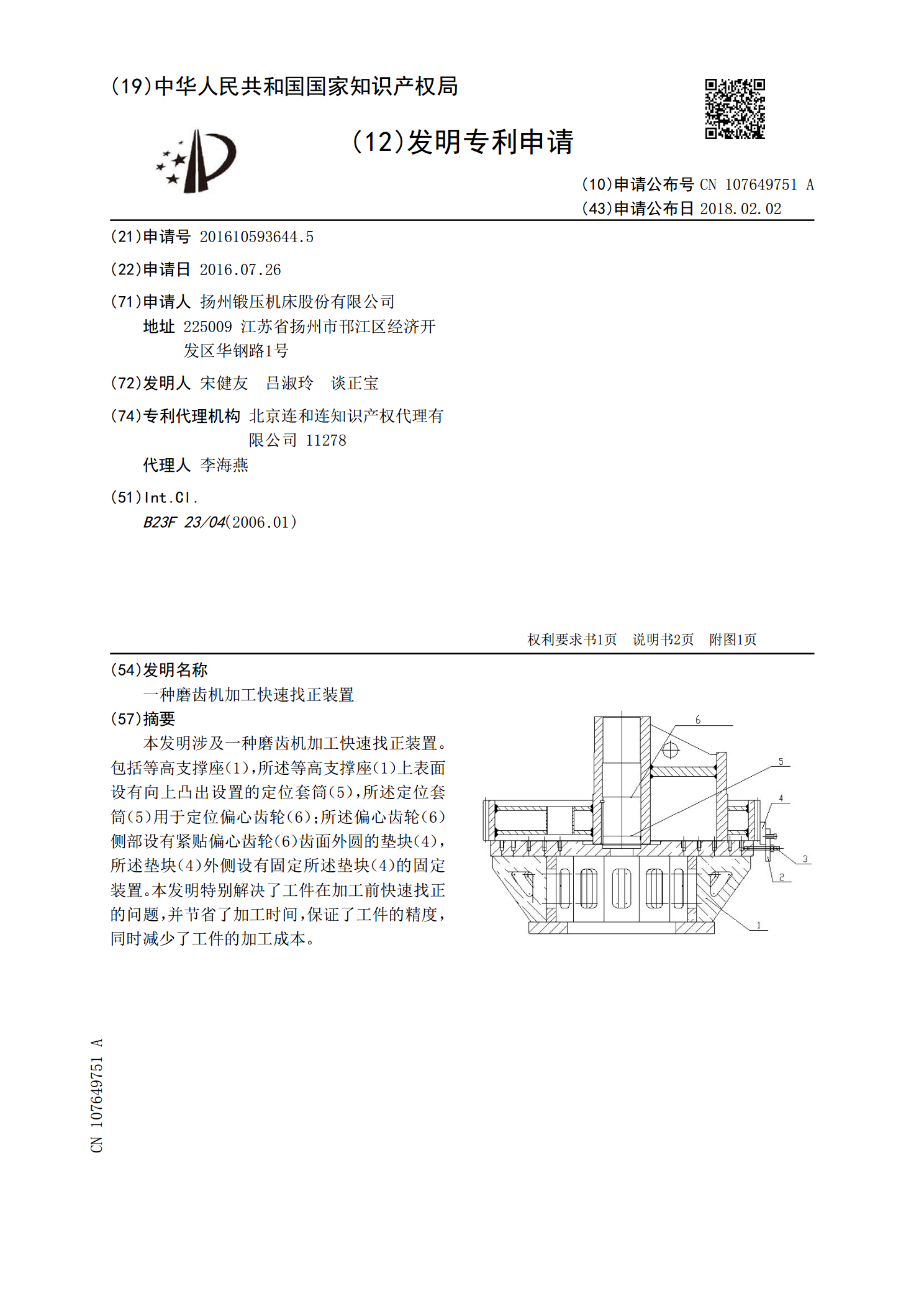
本发明涉及一种磨齿机加工快速找正装置。包括等高支撑座(1),所述等高支撑座(1)上表面设有向上凸出设置的定位套筒(5),所述定位套筒(5)用于定位偏心齿轮(6);所述偏心齿轮(6)侧部设有紧贴偏心齿轮(6)齿面外圆的垫块(4),所述垫块(4)外侧设有固定所述垫块(4)的固定装置。本发明特别解决了工件在加工前快速找正的问题,并节省了加工时间,保证了工件的精度,同时减少了工件的加工成本。

一种人字齿内齿圈加工方法.pdf
本发明公开了一种浮动式组合人字齿内齿圈加工方法,包括以下步骤:在圆周任意位置加工内齿和外花键;检测任意一对相邻内外齿的内齿槽与外花键齿槽中心相位差;以被测内外齿槽为起始点,以相位差检测结果为初始值,按顺序计算其余内齿齿槽与相邻外齿齿槽相位差;标记相位差计算结果中最小值对应的内外齿槽为基准齿槽。其中,数学模型以起始点内外齿相位差检测结果为常数,以拟标记的基准齿槽与起始点齿槽的齿数距离为变量建立,并采用迭代运算法则计算。本发明的有益效果是,加工路线短,装夹次数少,检测工作量小,加工精度高,效率高,质量保障能力