
一种机械臂末端执行器.pdf

梦影****主a

1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机械臂末端执行器.pdf
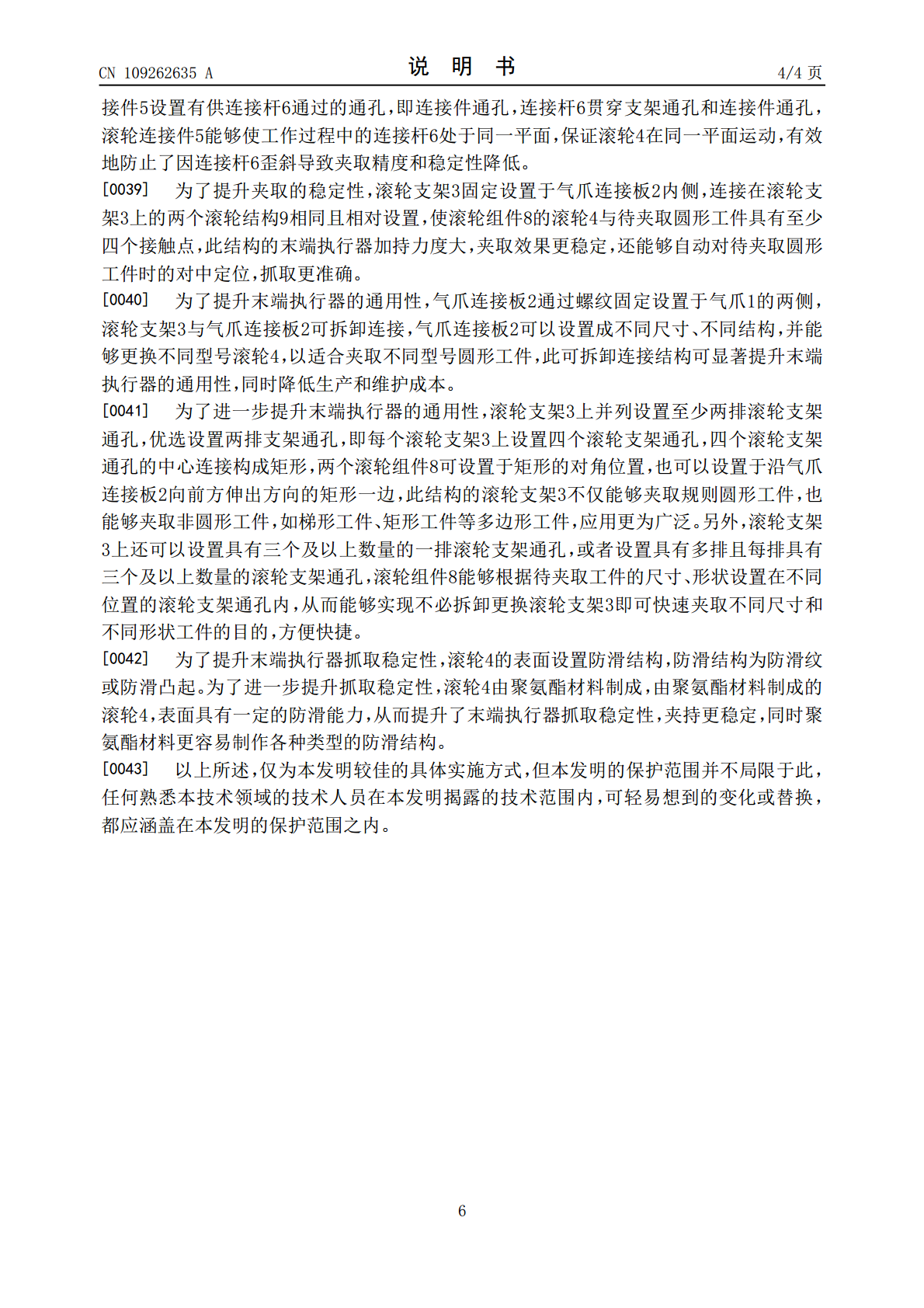
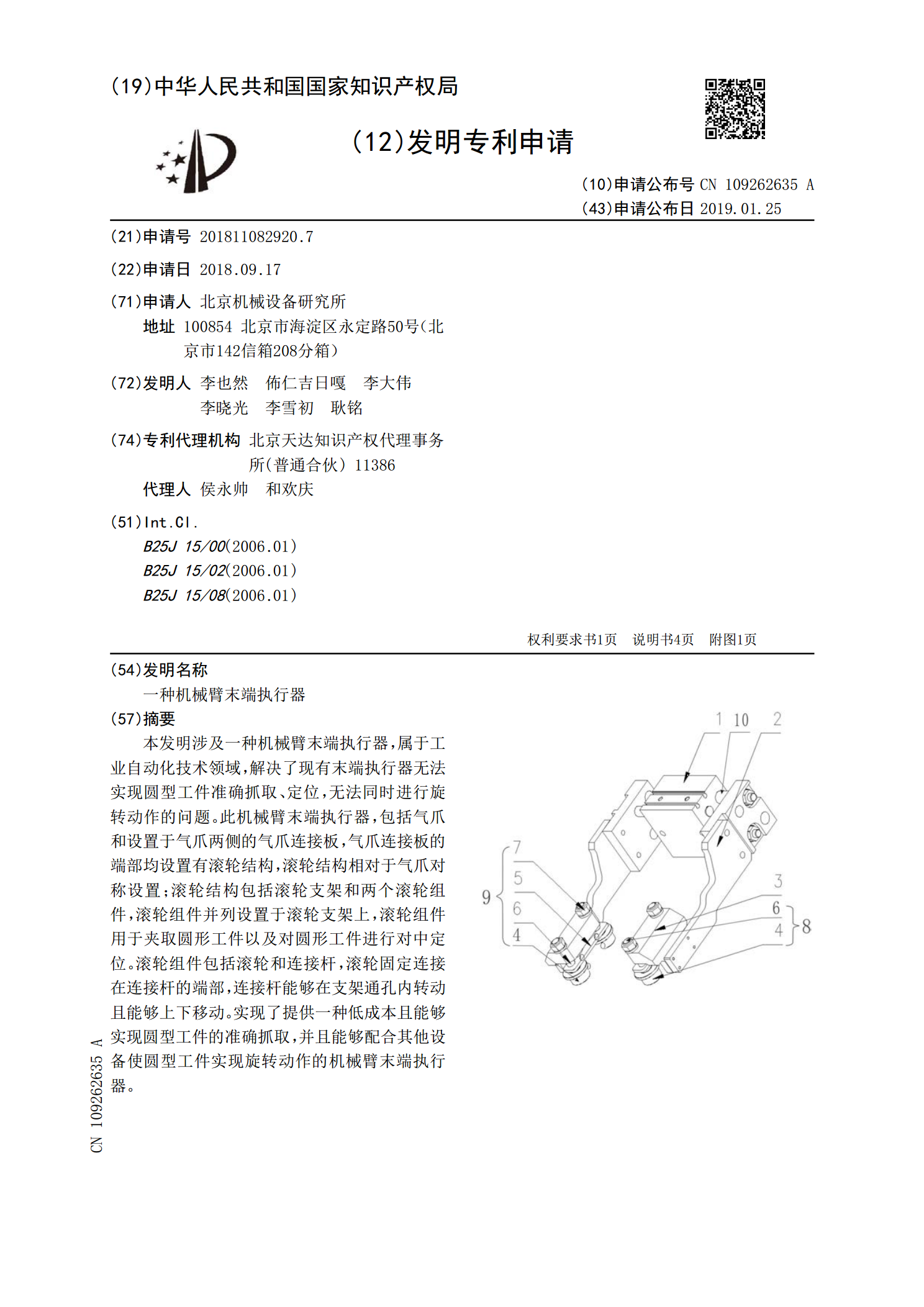
本发明涉及一种机械臂末端执行器,属于工业自动化技术领域,解决了现有末端执行器无法实现圆型工件准确抓取、定位,无法同时进行旋转动作的问题。此机械臂末端执行器,包括气爪和设置于气爪两侧的气爪连接板,气爪连接板的端部均设置有滚轮结构,滚轮结构相对于气爪对称设置;滚轮结构包括滚轮支架和两个滚轮组件,滚轮组件并列设置于滚轮支架上,滚轮组件用于夹取圆形工件以及对圆形工件进行对中定位。滚轮组件包括滚轮和连接杆,滚轮固定连接在连接杆的端部,连接杆能够在支架通孔内转动且能够上下移动。实现了提供一种低成本且能够实现圆型工件的

机械臂机构末端执行器工作空间分析.docx
机械臂机构末端执行器工作空间分析机械臂是一种用于替代人类完成危险、繁重或精细工作的设备。机械臂的工作空间是指机械臂末端执行器能够到达的所有位置和方向的集合。分析机械臂机构末端执行器的工作空间对于设计和控制机械臂具有重要的意义。本论文将探讨机械臂机构末端执行器工作空间的分析方法和相关的应用领域。一、机械臂末端执行器工作空间的定义机械臂末端执行器是机械臂的最后一关节,通常装有工具或夹具,用于完成特定的任务。机械臂的末端执行器工作空间是指末端执行器能够到达的所有位置和方向的集合。工作空间的定义可以根据具体的应用

一种用于捻打堵漏的机械臂末端执行器.pdf
本发明实施例公开了一种用于捻打堵漏的机械臂末端执行器,包括气冲锤、自定心模块和夹取模块,所述夹取模块包括一对卡爪,所述卡爪包括弯臂、气缸、滚轮,所述气缸的活塞杆安装于所述弯臂的上端下侧面,所述滚轮安装于所述弯臂的下端上侧面,所述自定心模块设置于所述一对卡爪之间,所述自定心模块与所述滚轮相配合夹取泄漏设备,所述自定心模块具有一竖直方向的通孔,所述气冲锤穿设于所述通孔,所述气冲锤下端安装有撞针,用于对泄漏设备上的泄漏点进行捻打堵漏。采用本发明,可代替人工对泄漏管道进行捻打堵漏,可以大大减少人工成本,且降低堵漏
一种用于TBM单刃滚刀换取的机械臂末端执行器.pdf
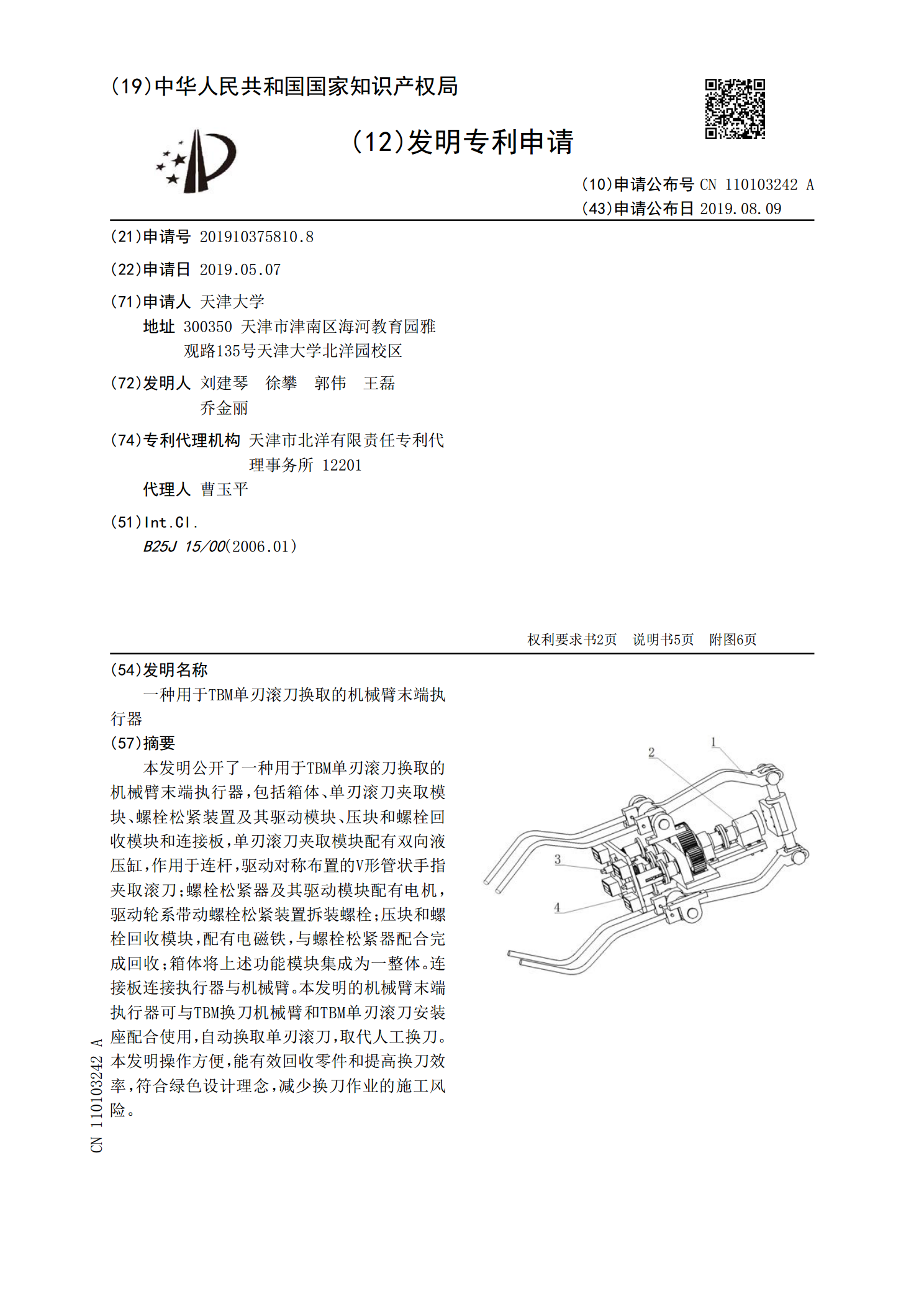
本发明公开了一种用于TBM单刃滚刀换取的机械臂末端执行器,包括箱体、单刃滚刀夹取模块、螺栓松紧装置及其驱动模块、压块和螺栓回收模块和连接板,单刃滚刀夹取模块配有双向液压缸,作用于连杆,驱动对称布置的V形管状手指夹取滚刀;螺栓松紧器及其驱动模块配有电机,驱动轮系带动螺栓松紧装置拆装螺栓;压块和螺栓回收模块,配有电磁铁,与螺栓松紧器配合完成回收;箱体将上述功能模块集成为一整体。连接板连接执行器与机械臂。本发明的机械臂末端执行器可与TBM换刀机械臂和TBM单刃滚刀安装座配合使用,自动换取单刃滚刀,取代人工换刀。

一种实现空间机械臂自爬行与载荷操作的末端执行器.pdf
一种实现空间机械臂自爬行与载荷操作的末端执行器,它涉及一种机械臂用末端执行器,以解决现有的欧洲机械臂和装配机械臂的末端执行器捕获与锁紧功能集成于捕获机构导致捕获容差小,以及空间站遥操作机械臂的末端执行器由于捕获机构的特征导致无法实现机械动力输出不足的问题,它包括支撑与保护装置、啮合对接装置、捕获锁紧动力驱动装置、捕获锁紧装置和动力输出驱动装置;所述捕获锁紧动力输入驱动装置包括输入传动机构、第六直齿轮和丝杠;所述捕获锁紧装置包括圆盘和三组捕获锁紧手指,所述动力输出驱动装置包括输出传动机构、第七直齿轮、输出传