
一种助力外骨骼机器人.pdf

一吃****昕靓

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种助力外骨骼机器人的头部关节及助力外骨骼机器人.pdf
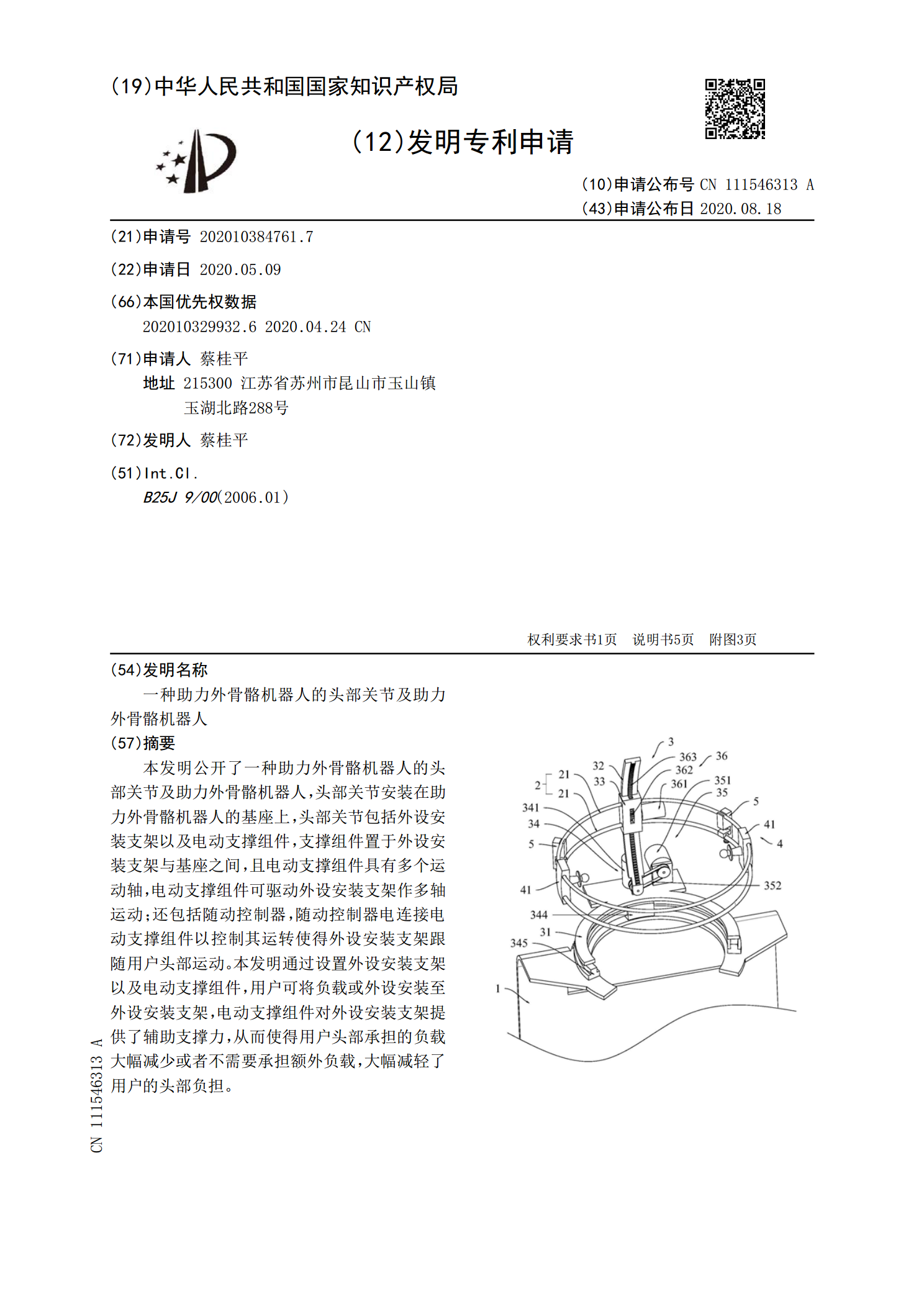
本发明公开了一种助力外骨骼机器人的头部关节及助力外骨骼机器人,头部关节安装在助力外骨骼机器人的基座上,头部关节包括外设安装支架以及电动支撑组件,支撑组件置于外设安装支架与基座之间,且电动支撑组件具有多个运动轴,电动支撑组件可驱动外设安装支架作多轴运动;还包括随动控制器,随动控制器电连接电动支撑组件以控制其运转使得外设安装支架跟随用户头部运动。本发明通过设置外设安装支架以及电动支撑组件,用户可将负载或外设安装至外设安装支架,电动支撑组件对外设安装支架提供了辅助支撑力,从而使得用户头部承担的负载大幅减少或者不
一种助力外骨骼机器人.pdf
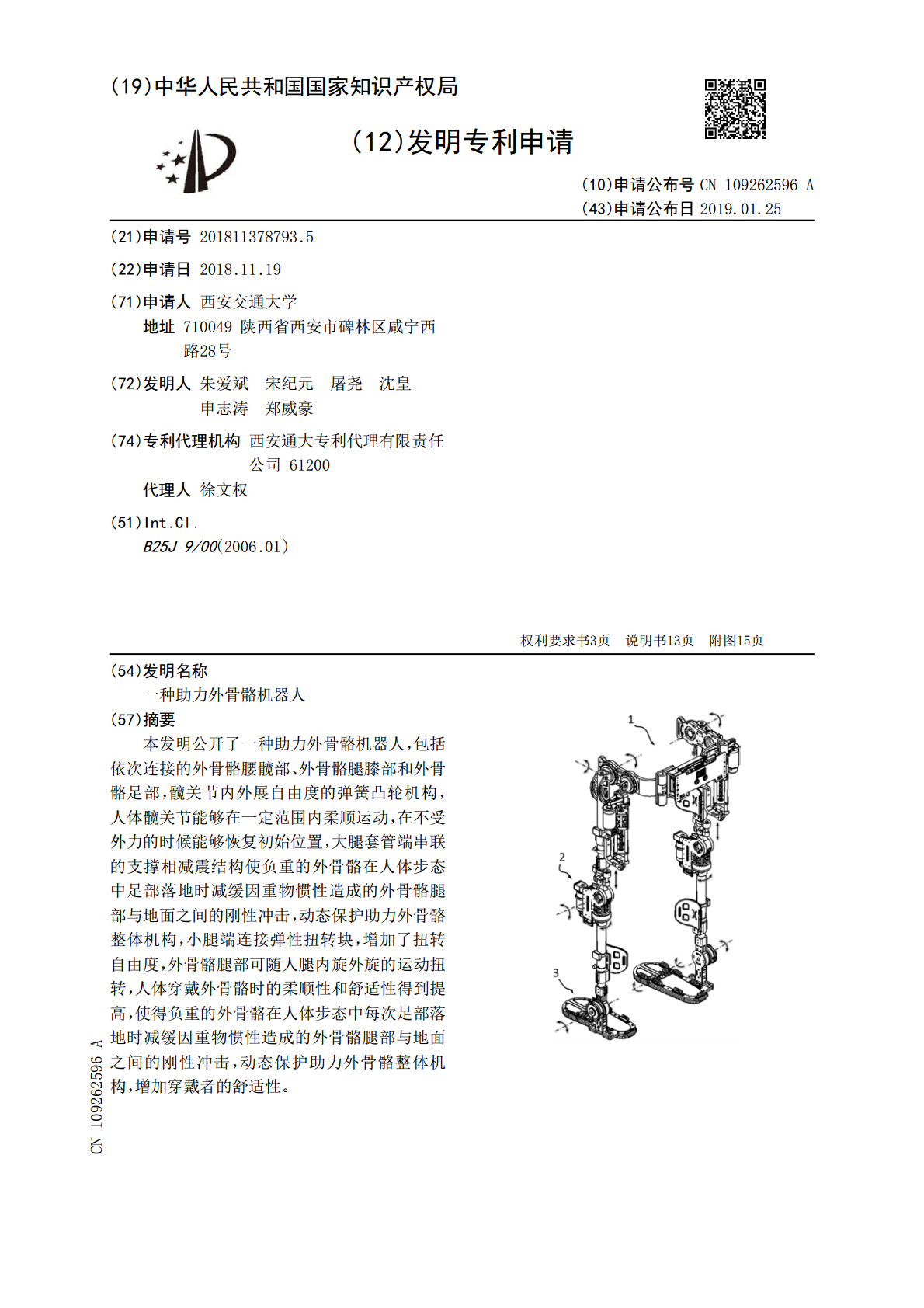
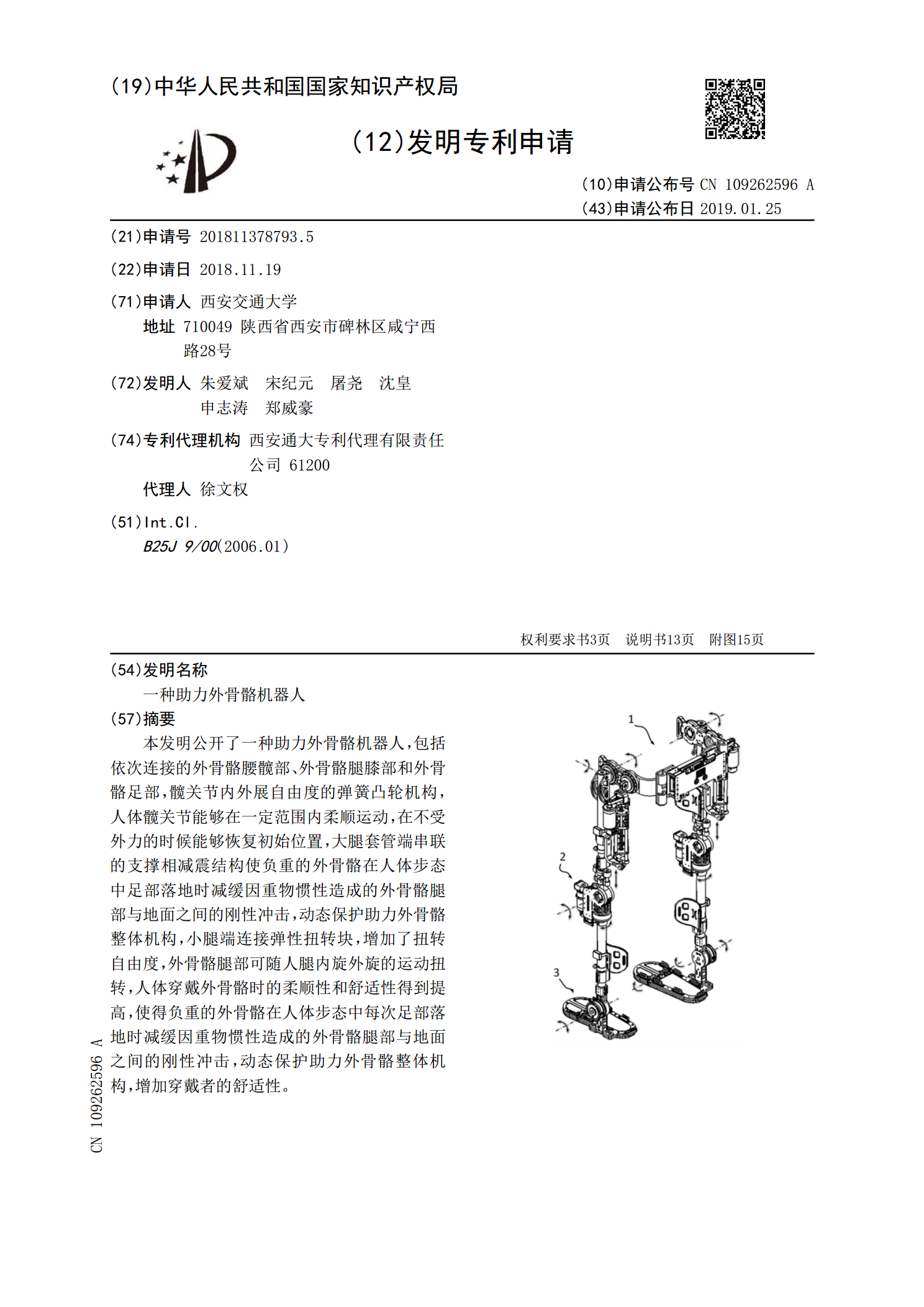
本发明公开了一种助力外骨骼机器人,包括依次连接的外骨骼腰髋部、外骨骼腿膝部和外骨骼足部,髋关节内外展自由度的弹簧凸轮机构,人体髋关节能够在一定范围内柔顺运动,在不受外力的时候能够恢复初始位置,大腿套管端串联的支撑相减震结构使负重的外骨骼在人体步态中足部落地时减缓因重物惯性造成的外骨骼腿部与地面之间的刚性冲击,动态保护助力外骨骼整体机构,小腿端连接弹性扭转块,增加了扭转自由度,外骨骼腿部可随人腿内旋外旋的运动扭转,人体穿戴外骨骼时的柔顺性和舒适性得到提高,使得负重的外骨骼在人体步态中每次足部落地时减缓因重物
一种腰部助力外骨骼机器人.pdf
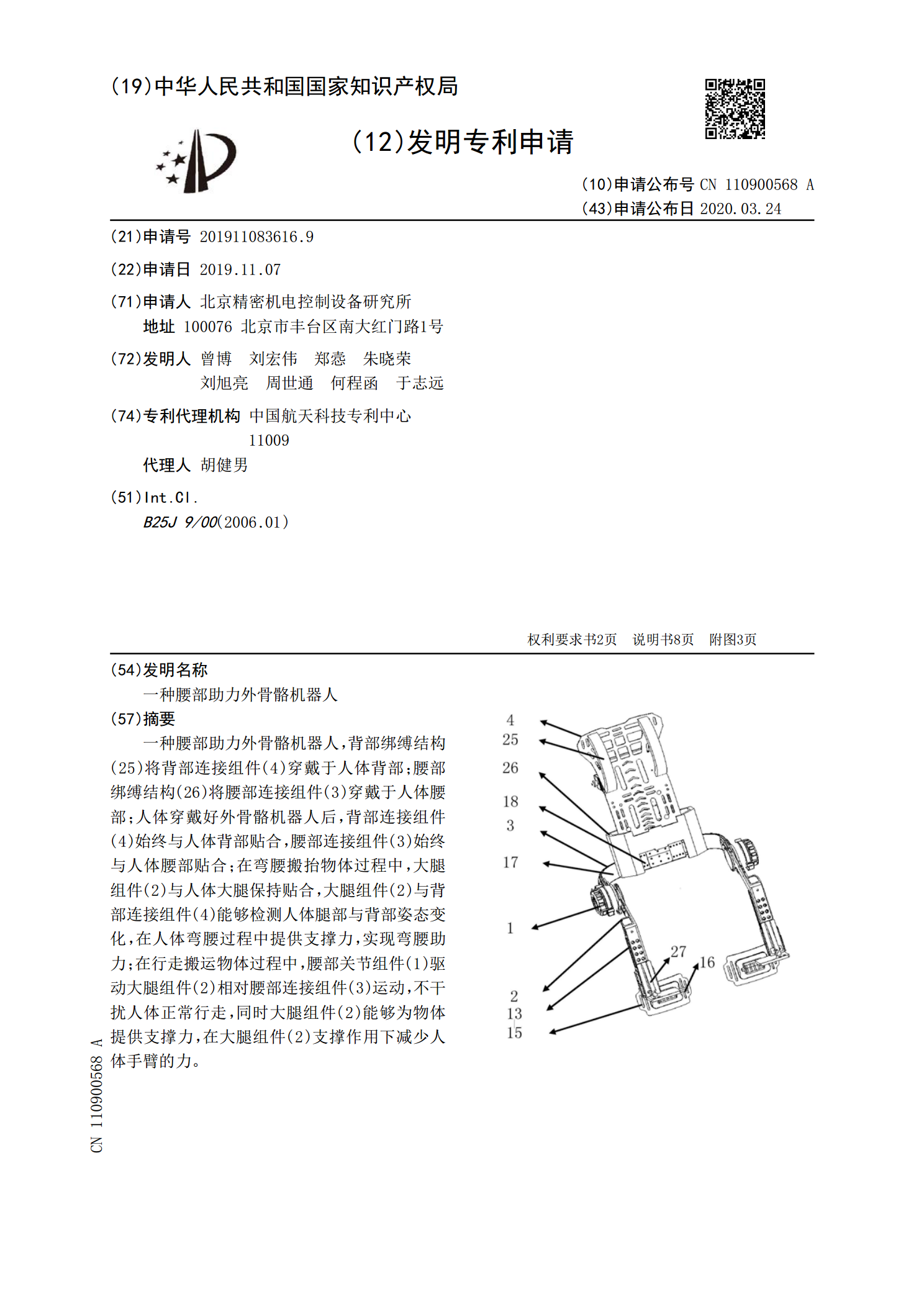
一种腰部助力外骨骼机器人,背部绑缚结构(25)将背部连接组件(4)穿戴于人体背部;腰部绑缚结构(26)将腰部连接组件(3)穿戴于人体腰部;人体穿戴好外骨骼机器人后,背部连接组件(4)始终与人体背部贴合,腰部连接组件(3)始终与人体腰部贴合;在弯腰搬抬物体过程中,大腿组件(2)与人体大腿保持贴合,大腿组件(2)与背部连接组件(4)能够检测人体腿部与背部姿态变化,在人体弯腰过程中提供支撑力,实现弯腰助力;在行走搬运物体过程中,腰部关节组件(1)驱动大腿组件(2)相对腰部连接组件(3)运动,不干扰人体正常行走,
一种助力上肢外骨骼机器人.pdf
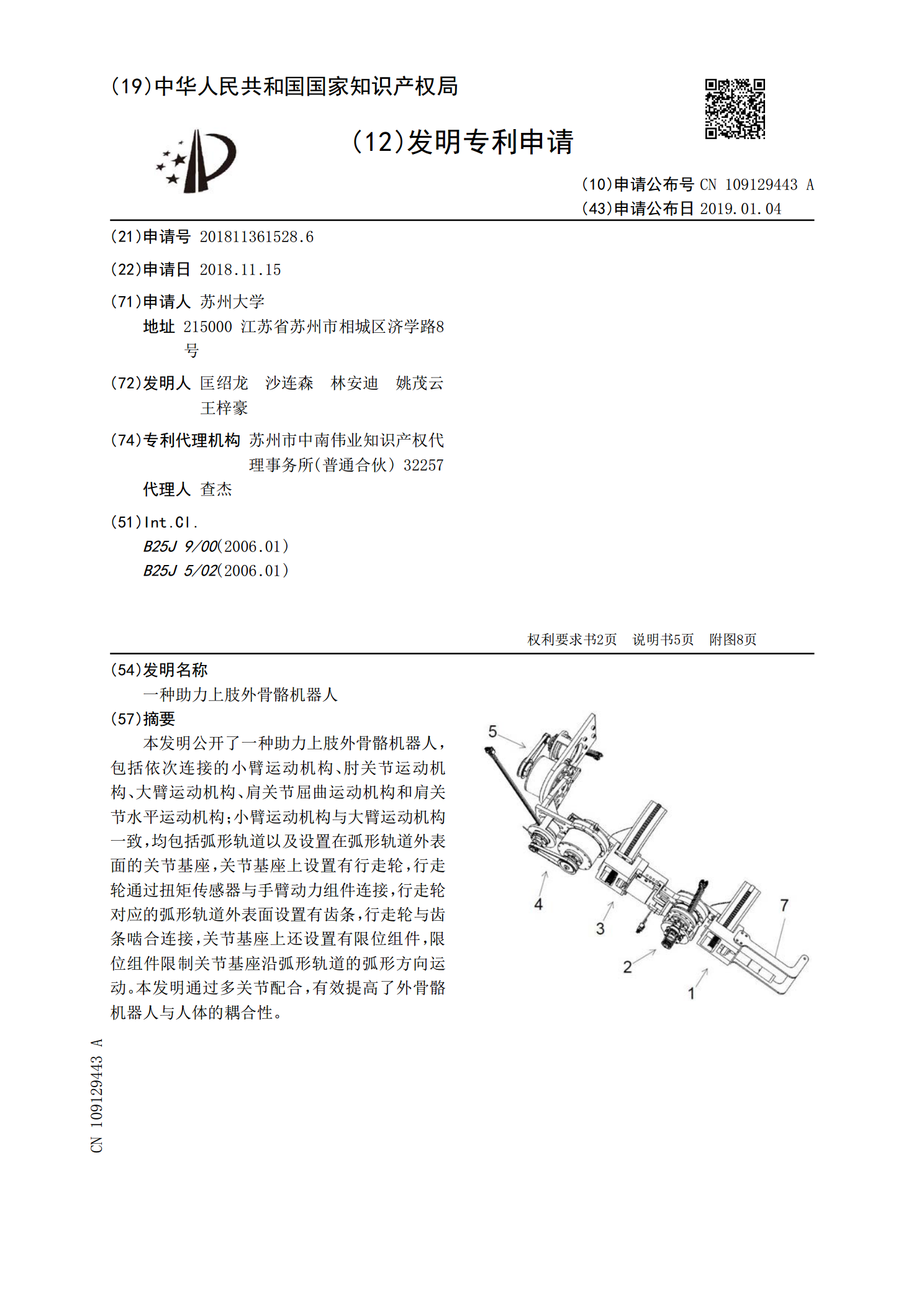
本发明公开了一种助力上肢外骨骼机器人,包括依次连接的小臂运动机构、肘关节运动机构、大臂运动机构、肩关节屈曲运动机构和肩关节水平运动机构;小臂运动机构与大臂运动机构一致,均包括弧形轨道以及设置在弧形轨道外表面的关节基座,关节基座上设置有行走轮,行走轮通过扭矩传感器与手臂动力组件连接,行走轮对应的弧形轨道外表面设置有齿条,行走轮与齿条啮合连接,关节基座上还设置有限位组件,限位组件限制关节基座沿弧形轨道的弧形方向运动。本发明通过多关节配合,有效提高了外骨骼机器人与人体的耦合性。

上肢助力外骨骼机器人.pdf
本发明公开了一种上肢助力外骨骼机器人,包括伸缩模拟肌肉、液压动力机构、胸部支撑架、肩部支撑架和大臂连接套;伸缩模拟肌肉包括第一软管和多个液压缸,液压缸内设置有第一活塞、第一活塞杆、第二活塞和第二活塞杆,相邻液压缸的第一活塞杆和第二活塞杆连接,胸部支撑架固定在用户的胸部,肩部支撑架固定在用户的肩部,大臂连接套固定在用户的大臂上,伸缩模拟肌肉的两端的液压缸分别连接肩部支撑架和大臂连接套;本发明利用多个液压缸形成伸缩模拟肌肉,不但结构小质量轻,而且通过将伸缩模拟肌肉附着在大臂的不同位置可以助力大臂实现举臂、下垂