
工业机器人用移动底座.pdf

思洁****爱吗

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人用移动底座.pdf
本发明公开了工业机器人用移动底座,包括底座,所述底座的底部外壁开设有圆形槽,且圆形槽的圆周内壁滑动连接有四个等距离分布的滑动圆头,四个所述滑动圆头的底部外壁均通过螺栓连接有电动伸缩杆,且四个电动伸缩杆的底部外壁通过螺栓连接有同一个水平放置的转动盘,所述底座的底部四角外壁均通过螺栓连接有滑动轮,所述底座四侧外壁的顶部和底部均开设有滑动槽,且滑动槽的一侧内壁通过螺钉连接有减震弹簧。本发明中,设置有转动盘、步进电机、电动伸缩杆和伸缩杆,能够带动底座上的移动机器人进行原地转向,提高了移动机器人的工作效率,并且也极
消防机器人用移动底座.pdf
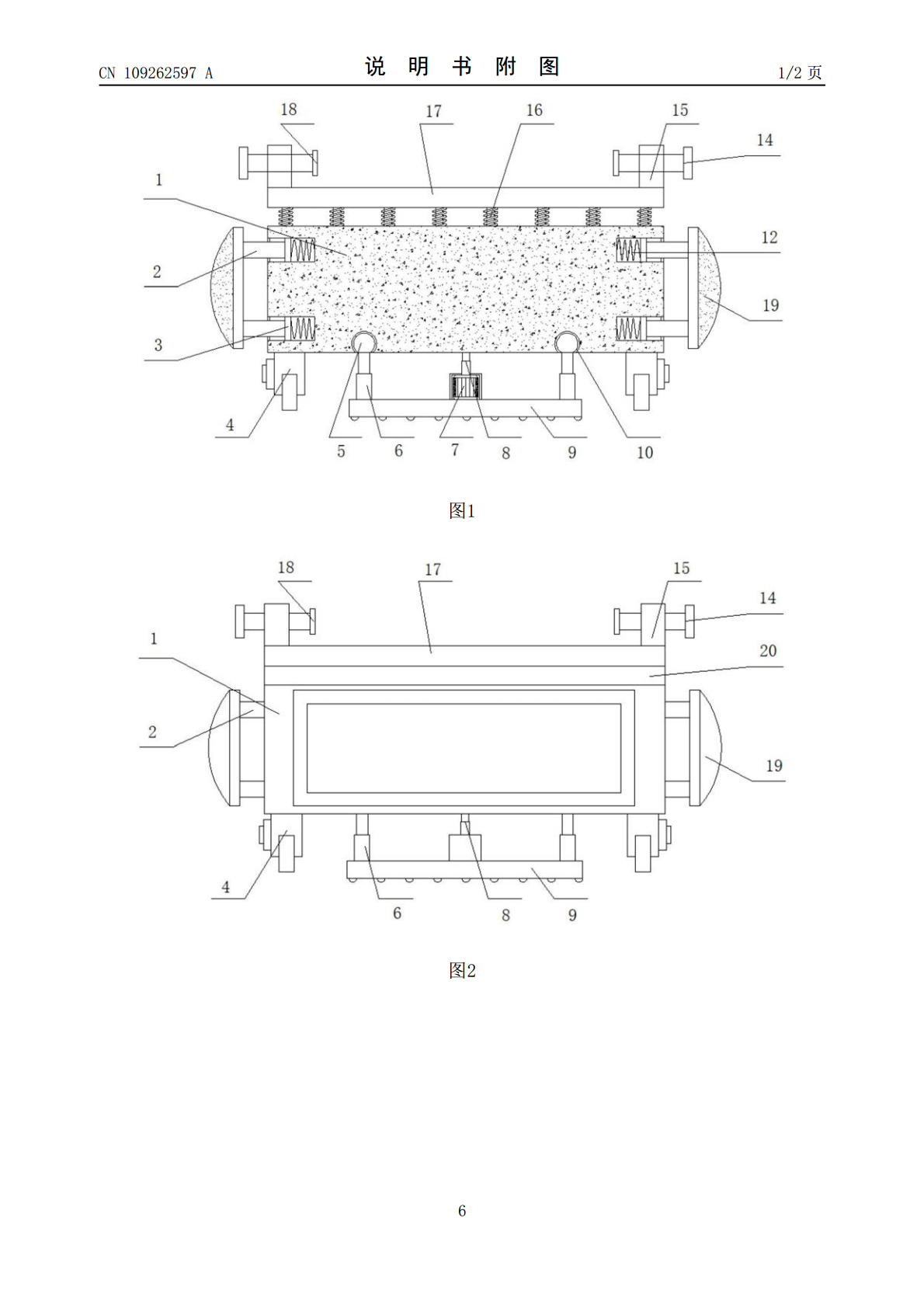
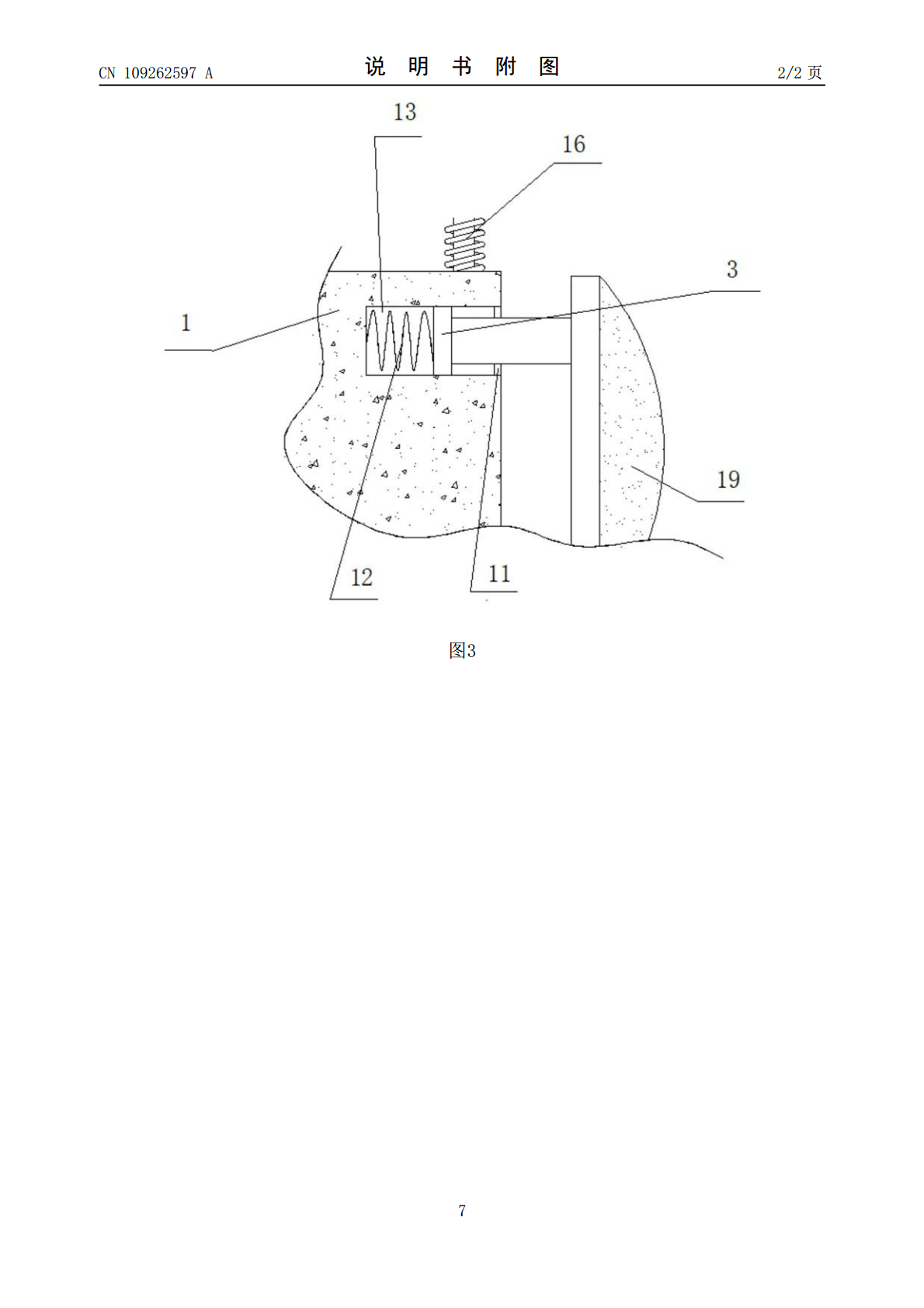
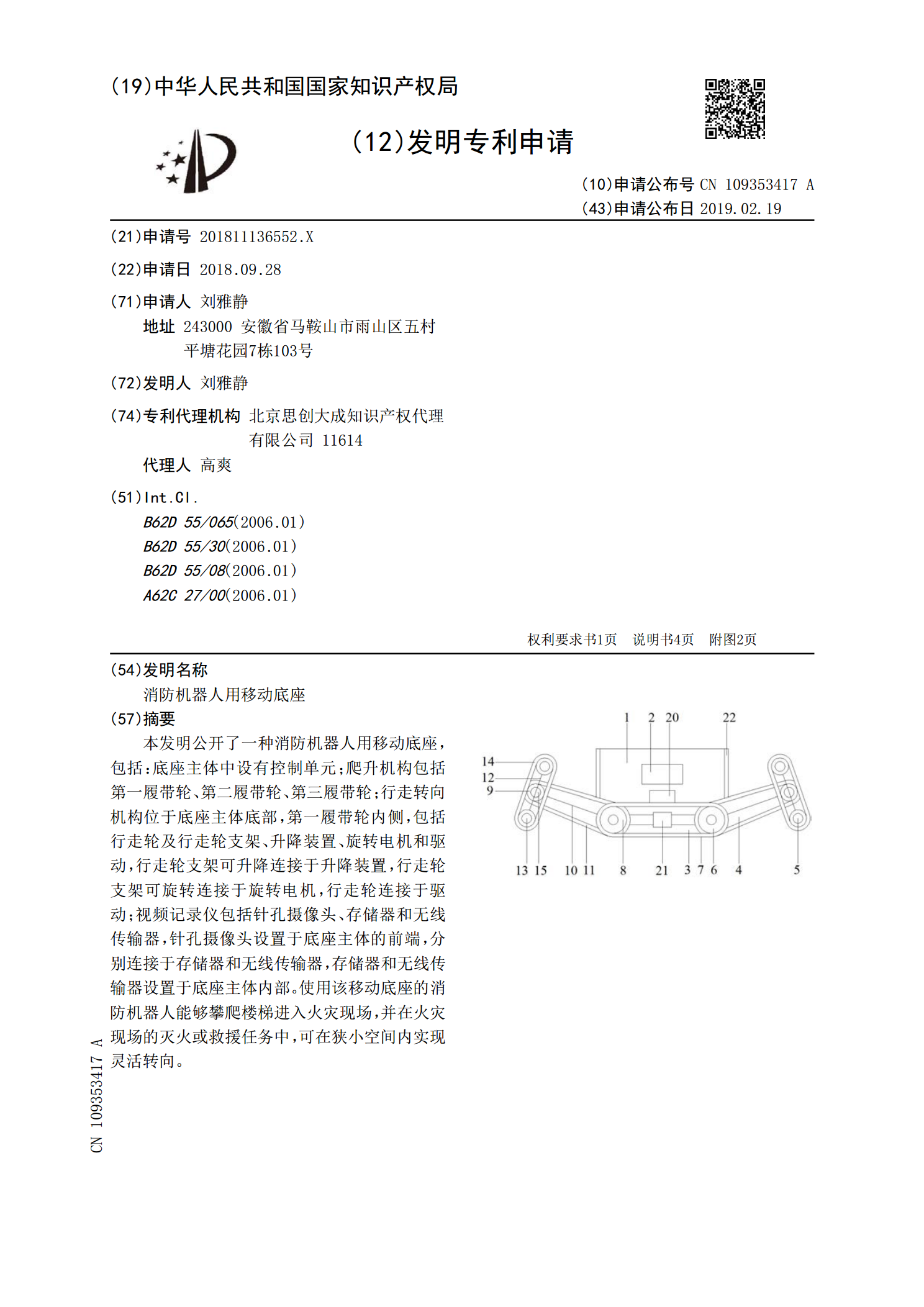
本发明公开了一种消防机器人用移动底座,包括:底座主体中设有控制单元;爬升机构包括第一履带轮、第二履带轮、第三履带轮;行走转向机构位于底座主体底部,第一履带轮内侧,包括行走轮及行走轮支架、升降装置、旋转电机和驱动,行走轮支架可升降连接于升降装置,行走轮支架可旋转连接于旋转电机,行走轮连接于驱动;视频记录仪包括针孔摄像头、存储器和无线传输器,针孔摄像头设置于底座主体的前端,分别连接于存储器和无线传输器,存储器和无线传输器设置于底座主体内部。使用该移动底座的消防机器人能够攀爬楼梯进入火灾现场,并在火灾现场的灭火
消防机器人用移动底座.pdf
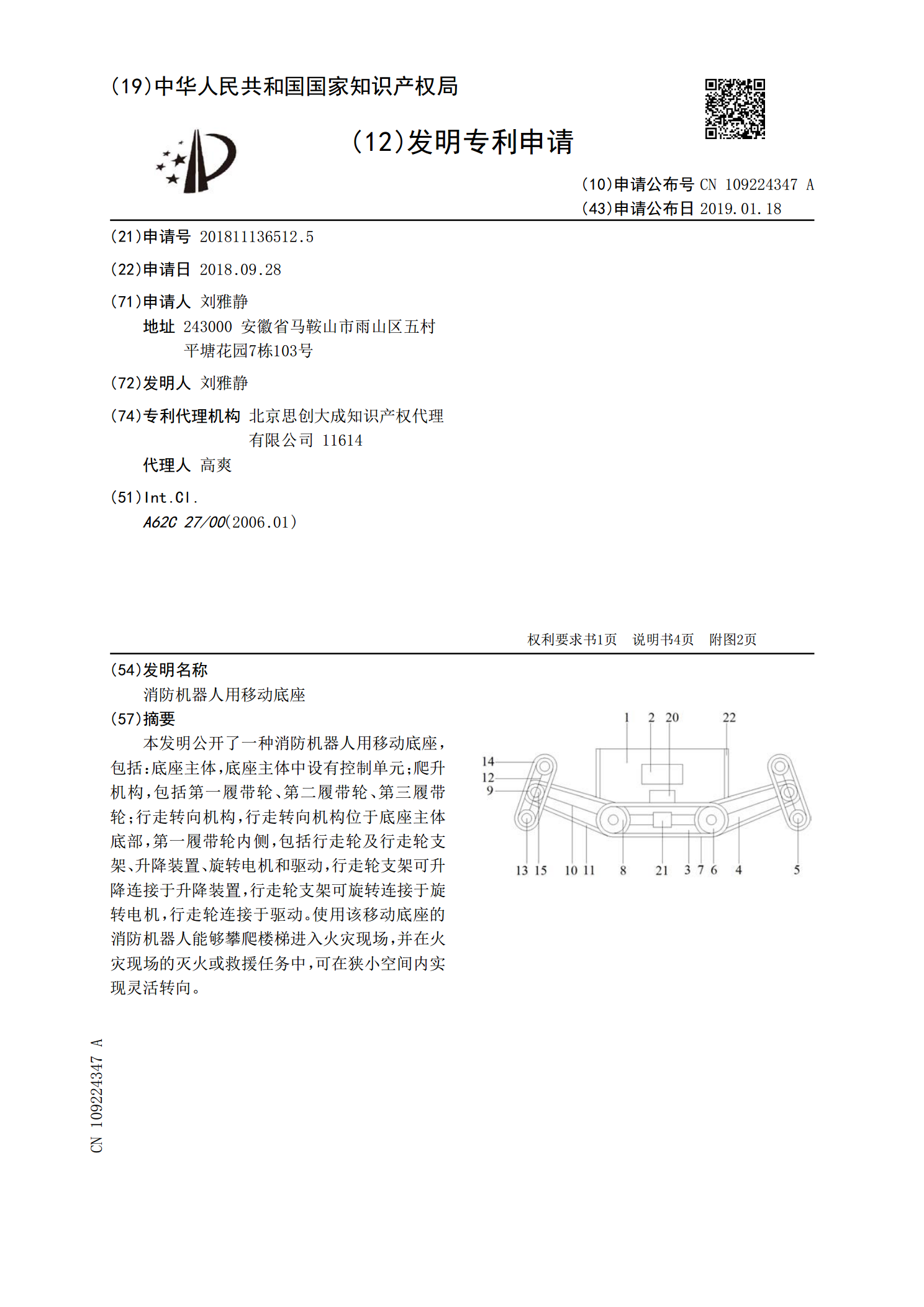
本发明公开了一种消防机器人用移动底座,包括:底座主体,底座主体中设有控制单元;爬升机构,包括第一履带轮、第二履带轮、第三履带轮;行走转向机构,行走转向机构位于底座主体底部,第一履带轮内侧,包括行走轮及行走轮支架、升降装置、旋转电机和驱动,行走轮支架可升降连接于升降装置,行走轮支架可旋转连接于旋转电机,行走轮连接于驱动。使用该移动底座的消防机器人能够攀爬楼梯进入火灾现场,并在火灾现场的灭火或救援任务中,可在狭小空间内实现灵活转向。
消防机器人用移动底座.pdf
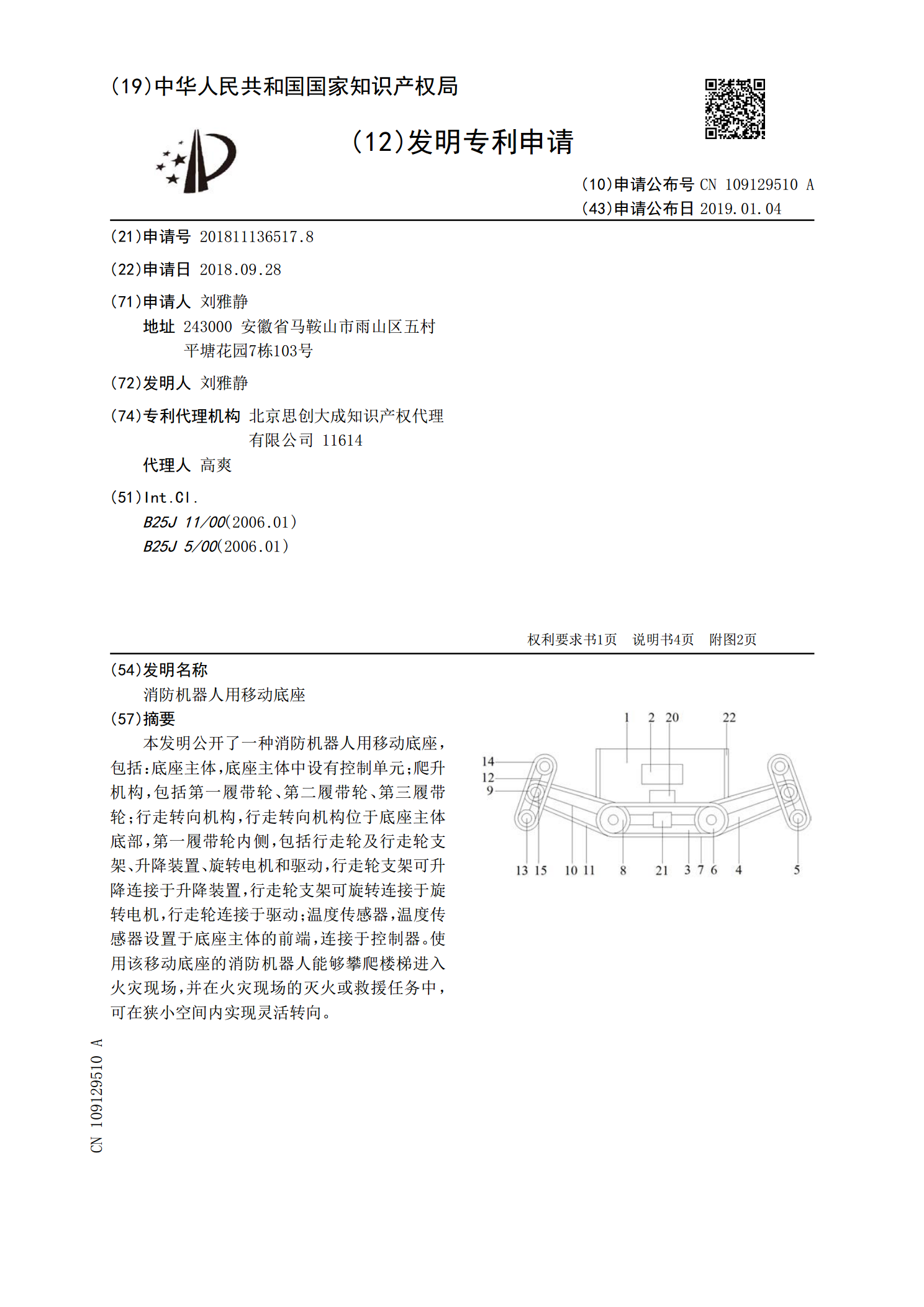
本发明公开了一种消防机器人用移动底座,包括:底座主体,底座主体中设有控制单元;爬升机构,包括第一履带轮、第二履带轮、第三履带轮;行走转向机构,行走转向机构位于底座主体底部,第一履带轮内侧,包括行走轮及行走轮支架、升降装置、旋转电机和驱动,行走轮支架可升降连接于升降装置,行走轮支架可旋转连接于旋转电机,行走轮连接于驱动;温度传感器,温度传感器设置于底座主体的前端,连接于控制器。使用该移动底座的消防机器人能够攀爬楼梯进入火灾现场,并在火灾现场的灭火或救援任务中,可在狭小空间内实现灵活转向。
一种机器人用移动底座.pdf
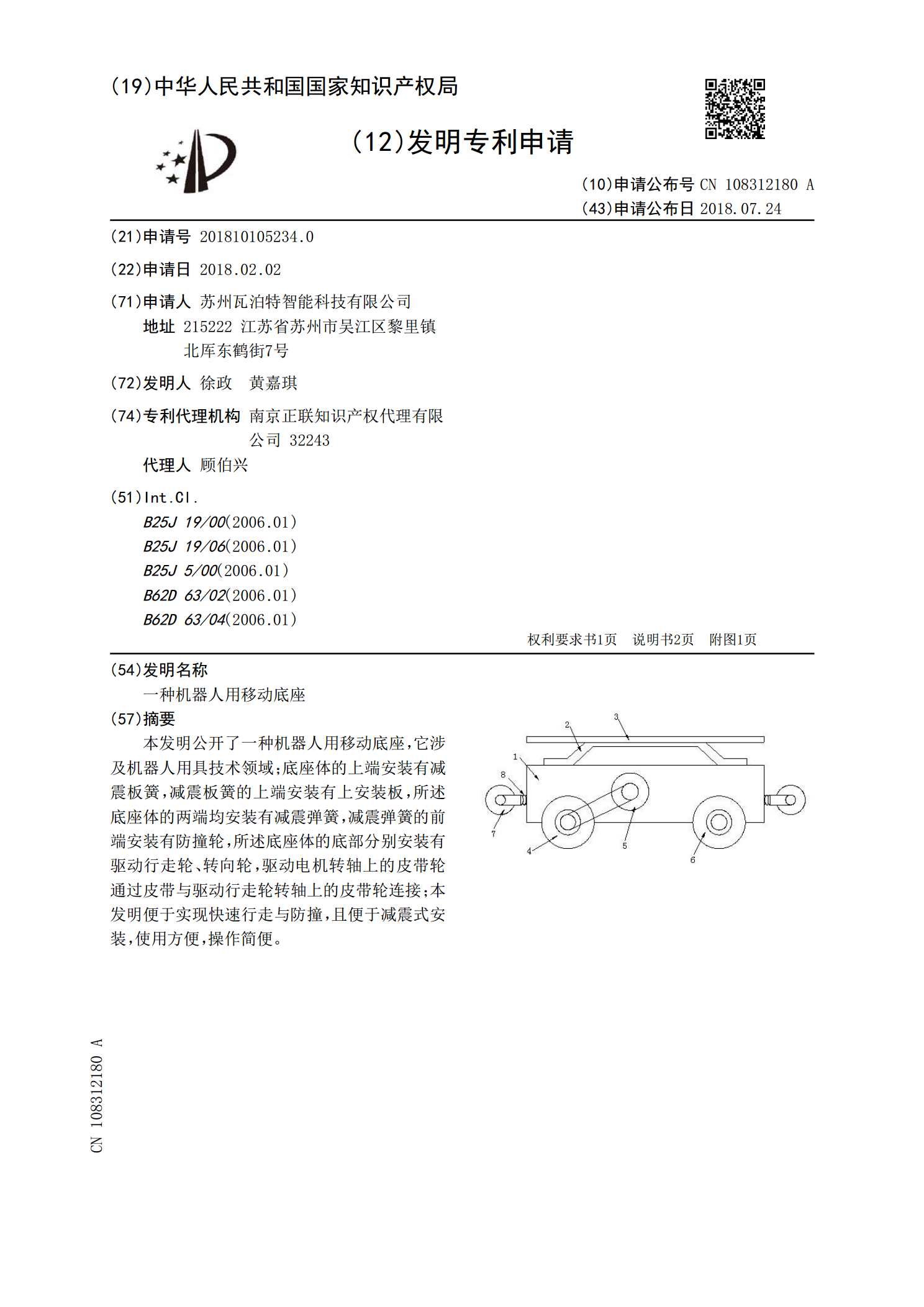
本发明公开了一种机器人用移动底座,它涉及机器人用具技术领域;底座体的上端安装有减震板簧,减震板簧的上端安装有上安装板,所述底座体的两端均安装有减震弹簧,减震弹簧的前端安装有防撞轮,所述底座体的底部分别安装有驱动行走轮、转向轮,驱动电机转轴上的皮带轮通过皮带与驱动行走轮转轴上的皮带轮连接;本发明便于实现快速行走与防撞,且便于减震式安装,使用方便,操作简便。