
一种龙门刨床变向机构传动比确定方法.pdf

和裕****az

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种龙门刨床变向机构传动比确定方法.pdf
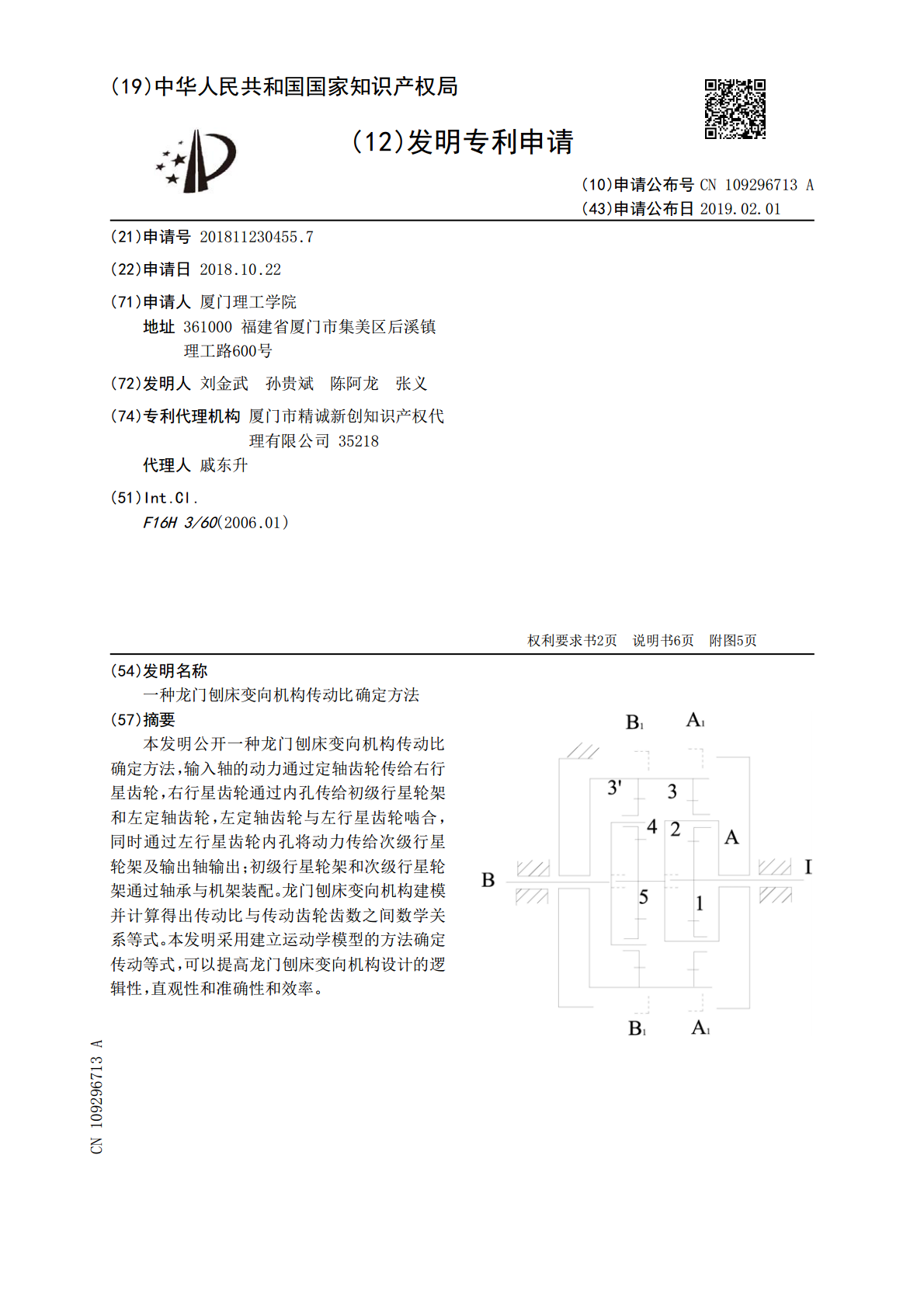
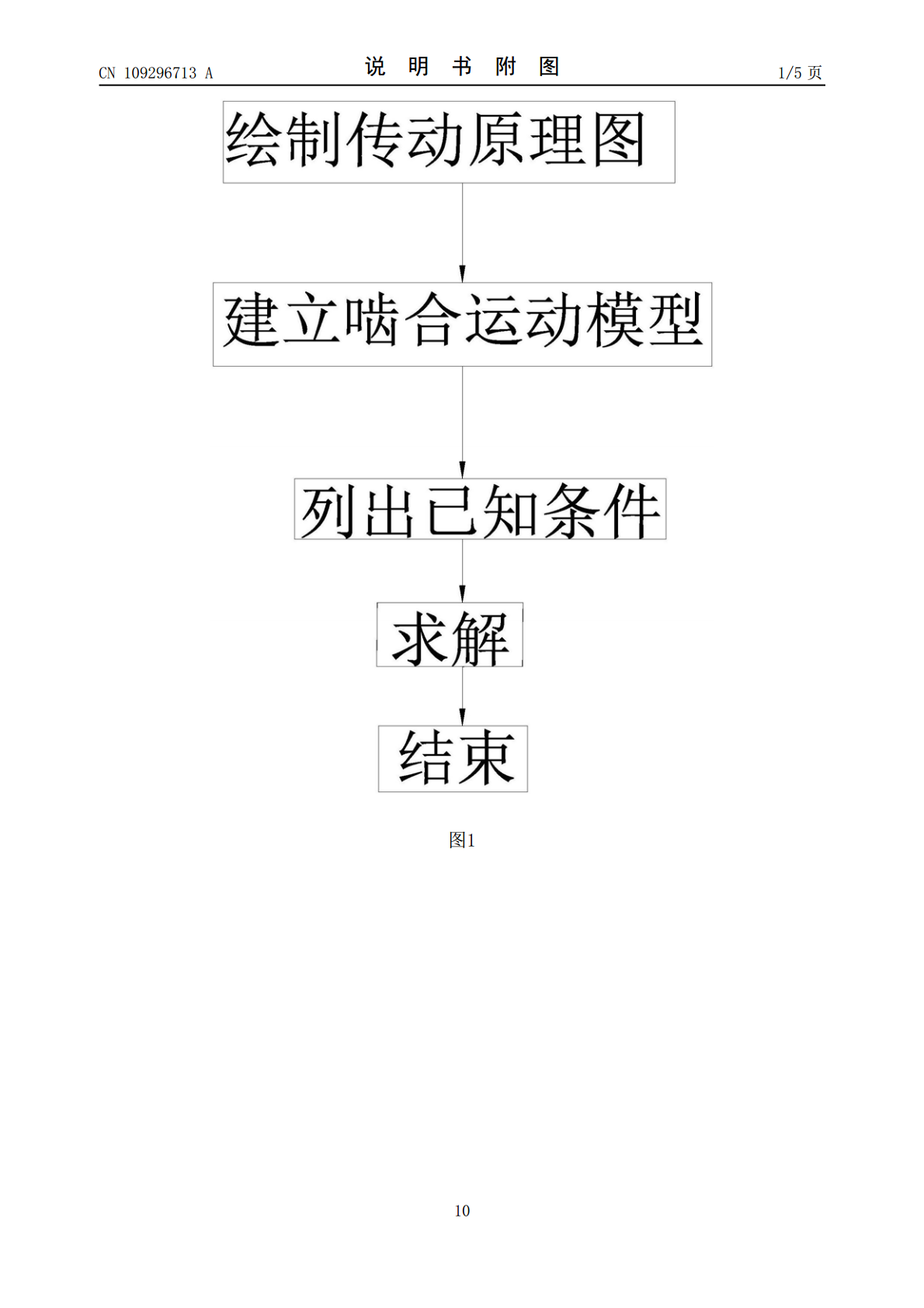
本发明公开一种龙门刨床变向机构传动比确定方法,输入轴的动力通过定轴齿轮传给右行星齿轮,右行星齿轮通过内孔传给初级行星轮架和左定轴齿轮,左定轴齿轮与左行星齿轮啮合,同时通过左行星齿轮内孔将动力传给次级行星轮架及输出轴输出;初级行星轮架和次级行星轮架通过轴承与机架装配。龙门刨床变向机构建模并计算得出传动比与传动齿轮齿数之间数学关系等式。本发明采用建立运动学模型的方法确定传动等式,可以提高龙门刨床变向机构设计的逻辑性,直观性和准确性和效率。

一种龙门刨床.pdf
本发明公开了一种龙门刨床,包括机架、连接杆、连杆、刀轴、工作台、刀轴架、滑块、滑块轨道、工作台调节手轮、齿轮连杆、齿轮和链条,所述连接杆下端与刀轴连接,连杆两端分别与连接杆的上端连接,刀轴架安装在机架上方两侧,滑块固定连接在刀轴两端部,滑块轨道安装在刀轴架上,工作台调节手轮与齿轮连杆、齿轮、链条传动配合设置在机架的一侧,链条两端与工作台前后端固定连接。本发明一种龙门刨床,结构简单,操作安全、方便,提高工作效率十几倍,节省能源,降低了生产成本。
一种可变传动比机构及可变传动比转向系统及其控制方法.pdf
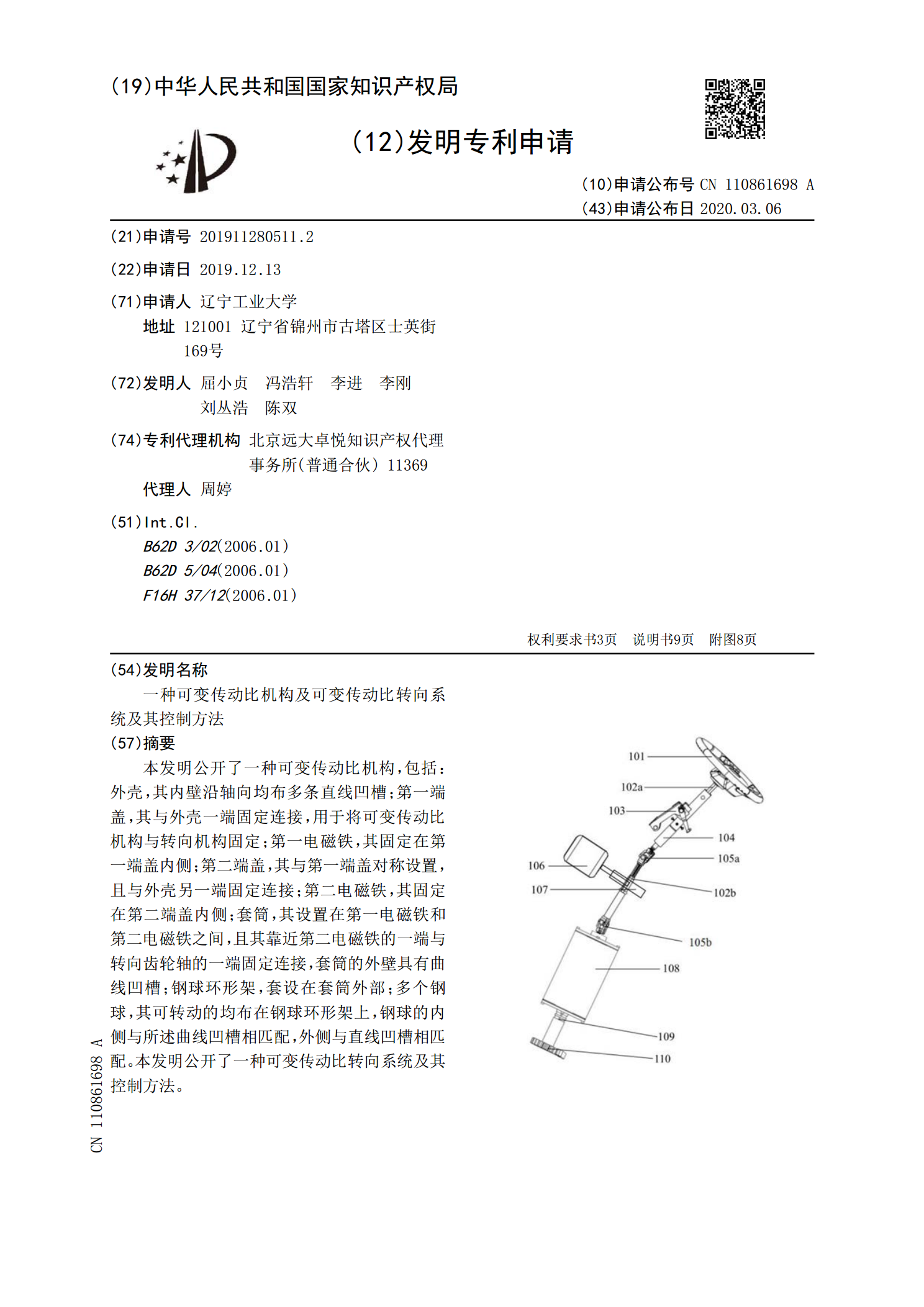
本发明公开了一种可变传动比机构,包括:外壳,其内壁沿轴向均布多条直线凹槽;第一端盖,其与外壳一端固定连接,用于将可变传动比机构与转向机构固定;第一电磁铁,其固定在第一端盖内侧;第二端盖,其与第一端盖对称设置,且与外壳另一端固定连接;第二电磁铁,其固定在第二端盖内侧;套筒,其设置在第一电磁铁和第二电磁铁之间,且其靠近第二电磁铁的一端与转向齿轮轴的一端固定连接,套筒的外壁具有曲线凹槽;钢球环形架,套设在套筒外部;多个钢球,其可转动的均布在钢球环形架上,钢球的内侧与所述曲线凹槽相匹配,外侧与直线凹槽相匹配。本发

龙门刨床 [龙门刨床说明书].docx
龙门刨床[龙门刨床说明书]主电路图及控制电路图主要结构运动形式结构:B2012A型龙门刨床有工作台、立柱、横梁左右侧刀架及垂直刀架、床身等部分组成。运动形式:B2012A型龙门刨床可分为主运动、进给运动、辅助运动三种。主运动是指工作台连续往返运动。进给运动是指刀架的进给。辅助运动是指调整刀具而设置的,如横梁的夹紧与放松,上下移动和抬刀。电力拖动的特点及控制要求1、B2012A型龙门刨床是频繁往复运动的生产机械,前进行程就是切削过程,后退行程是不作切削的,但后退速度要高于切削速度,为了满足不同的金属材料和不
龙门刨床.pdf
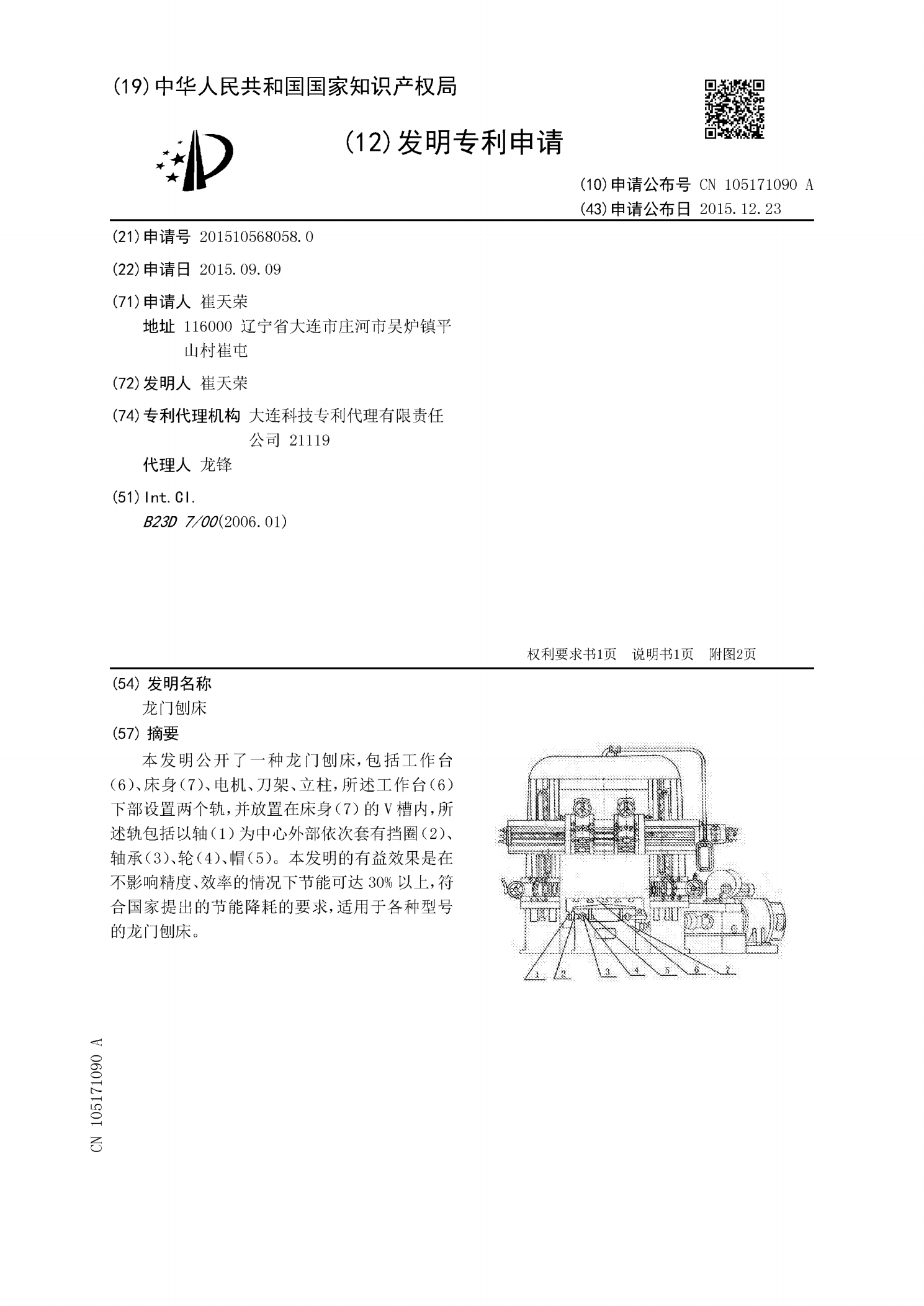
本发明公开了一种龙门刨床,包括工作台(6)、床身(7)、电机、刀架、立柱,所述工作台(6)下部设置两个轨,并放置在床身(7)的V槽内,所述轨包括以轴(1)为中心外部依次套有挡圈(2)、轴承(3)、轮(4)、帽(5)。本发明的有益效果是在不影响精度、效率的情况下节能可达30%以上,符合国家提出的节能降耗的要求,适用于各种型号的龙门刨床。