
一种伺服跟踪式钢轨轮廓波磨检测系统.pdf

听云****君哇


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种伺服跟踪式钢轨轮廓波磨检测系统.pdf
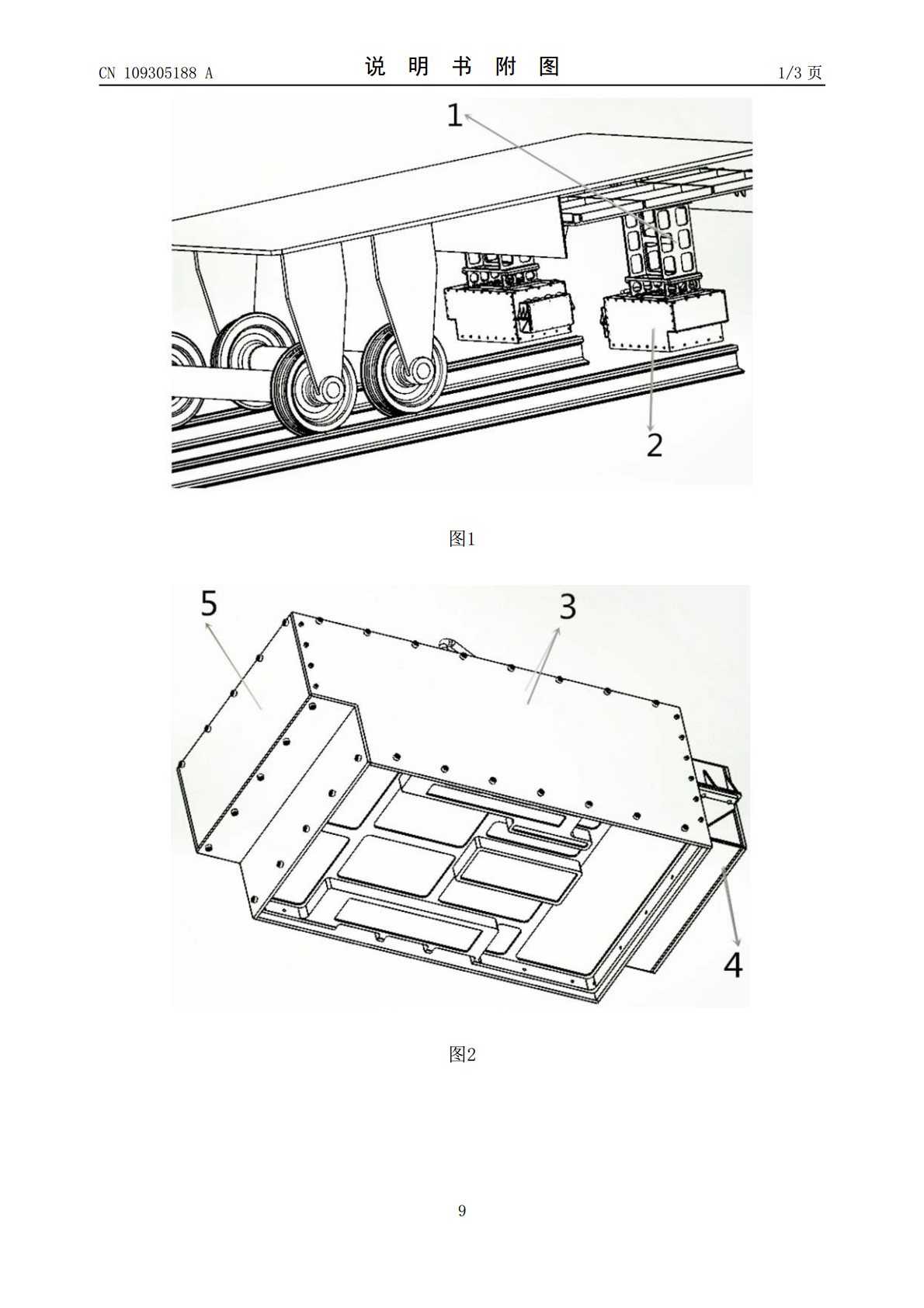
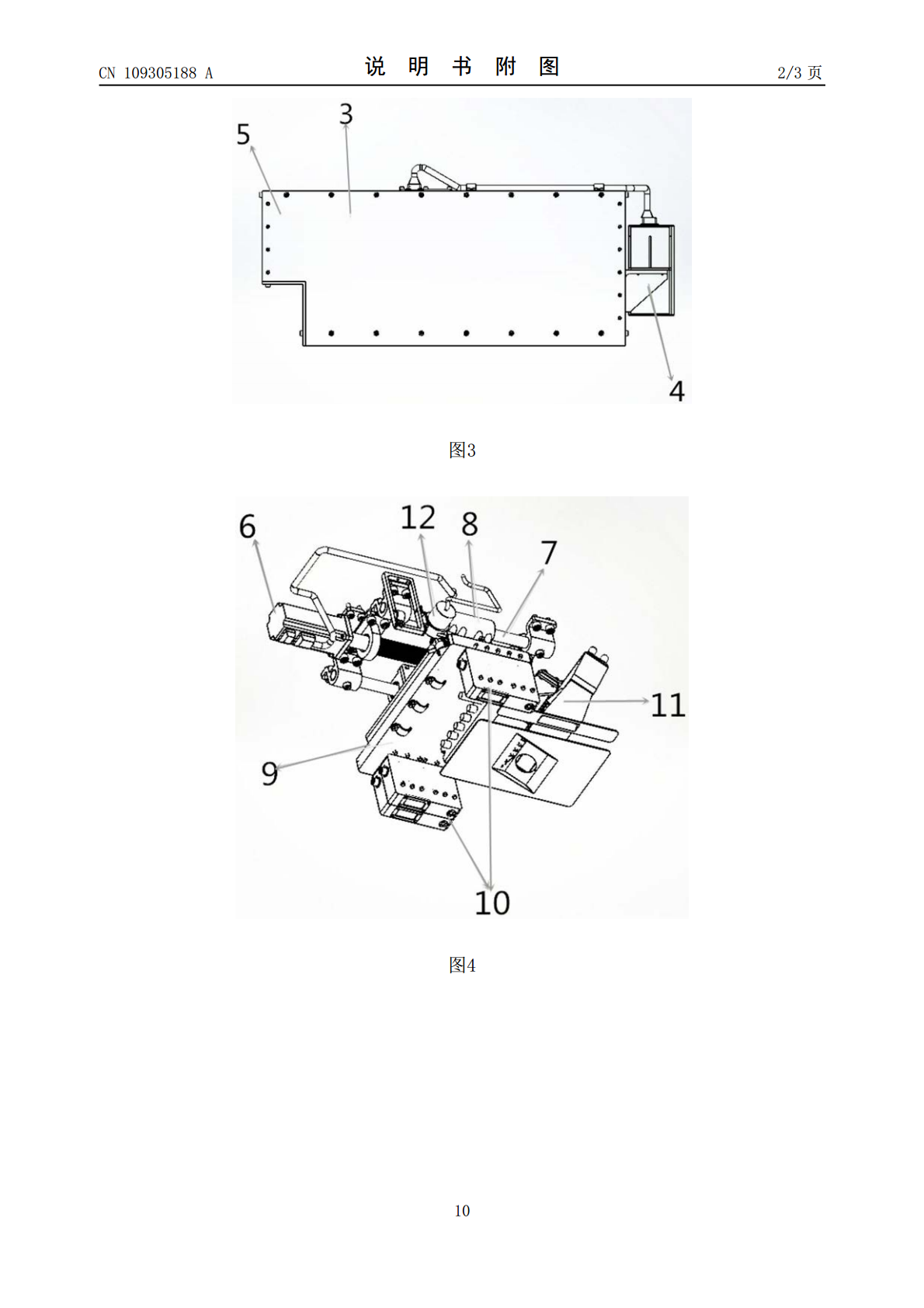
本发明提供了一种伺服跟踪式钢轨轮廓波磨检测系统,包括控制子系统、分别与所述控制子系统连接的两个伺服检测单元和与所述控制子系统连接的速度传感器;所述检测单元分别位于铁轨的上方;所述检测单元包括检测模块和支架;所述检测模块包括壳体和设于所述壳体内的伺服电机、与所述伺服电机输出轴连接的滚珠丝杆、套设于所述滚珠丝杆的导轨滑块、与所述导轨滑块固定连接的伺服驱动底座和固定于所述伺服驱动底座上的一维传感器和二维传感器以及长度传感器;所述壳体外设有与所述伺服电机连接的伺服控制器。该装置能够实现检测装置与轨道非接触式检测,

一种非接触式钢轨波磨与轮廓检测装置.pdf
本发明提供一种非接触式钢轨波磨与轮廓检测装置,包括垂直定位组件、侧向定位组件、支架小车以及自动控制系统,支架小车通过外力作用在钢轨上移动;垂直定位组件设置在支架小车顶部,用来实现支架小车的垂直升降;侧向定位组件为两套,分别设置在支架小车底部两侧,用来实现对钢轨不平顺及钢轨断面磨耗损的扫描;通过自动控制系统控制水平驱动装置、垂直驱动装置的运动。本装置优点在于可与钢轨铣磨车、钢轨打磨车等各类钢轨养护工程车配合使用,可实现作业时对钢轨轮廓的在线测量。

钢轨波磨检测系统及方法.pdf
本发明提供了一种钢轨波磨检测系统及方法,其中,该系统包括:时空同步单元,用于接收运营列车的里程信息和速度信息,将里程信息和速度信息发送至数据采集单元;数据采集单元,用于接收里程信息和速度信息;采集运营列车的设定车厢的设定轴的左轴箱和右轴箱的垂向加速度信息;将里程信息、速度信息和垂向加速度信息发送至数据处理单元;数据处理单元,用于根据接收的里程信息、速度信息和垂向加速度信息,获得钢轨波磨信息。本发明可以在不影响线路正常运营组织的前提下,实现在运营列车运行期间,高效准确地进行钢轨波磨检测,进而可以较早地发现线

一种钢轨波磨检测装置.pdf
本发明公开了一种钢轨波磨检测装置,包括U型支座,所述U型支座开口竖直朝下且沿纵向设置,所述U型支座的两个竖直部分均沿横向啮合连接有多个锁定组件,且两个竖直部分的所述锁定组件一一对照且镜像对称;所述U型支座的水平部分顶面沿纵向开设有滑槽,所述U型支座的水平部分的底面竖直沿纵向开设有腰型导槽。有益效果在于:本发明通过螺杆带动夹板彼此靠近的方式夹紧在钢轨两侧并通过锁紧螺母锁止,以此将U型支座快速的固定在钢轨外侧并朝下面对钢轨顶面,拆下时仅需拧松锁紧螺母即可解除对夹板夹紧状态的锁止,实现了装置在钢轨外侧的快速拆装

便携式钢轨波磨自动化检测系统研究.docx
便携式钢轨波磨自动化检测系统研究便携式钢轨波磨自动化检测系统研究摘要:随着铁路交通的发展,钢轨的质量和安全性成为确保铁路运输稳定运行的重要关键。而钢轨波磨是一种常见的钢轨缺陷,会导致铁路运输事故的发生。为了及时发现和修复钢轨波磨问题,减少事故的发生,本文研究了一种便携式钢轨波磨自动化检测系统。1.引言在铁路运输中,钢轨波磨是一种常见的钢轨缺陷,指的是钢轨表面的波浪状磨损。当钢轨波磨严重时,会产生剧烈的振动和噪音,降低列车的行驶平稳性,甚至引发列车脱轨事故。因此,及时检测和修复钢轨波磨问题至关重要。2.系统