
基于机器人的智能仓储.pdf

绮兰****文章

1/6

2/6

3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于机器人的智能仓储.pdf
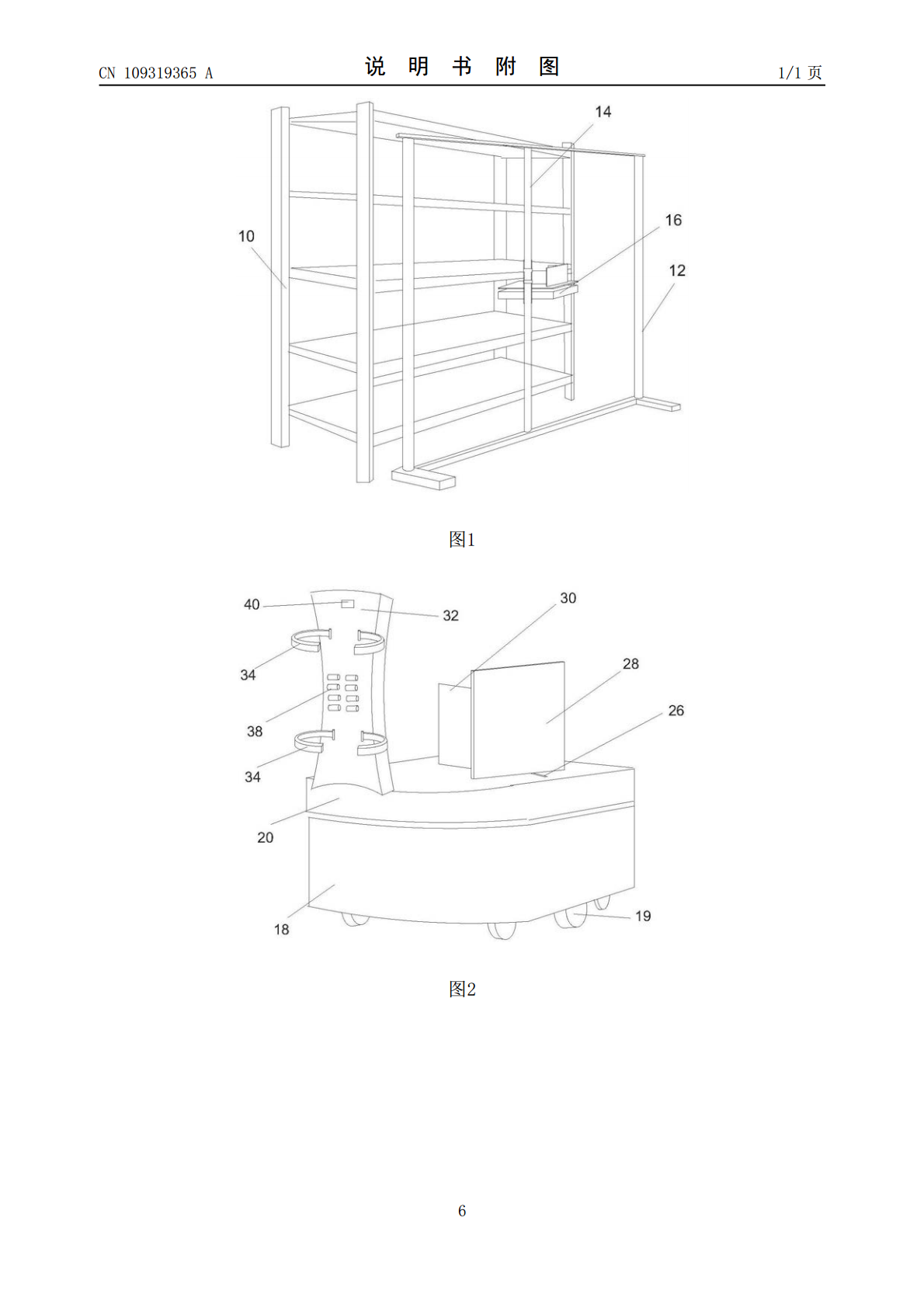
本发明公开了一种基于机器人的智能仓储,其包括设置在仓储内的若干个货架、存储所述货架上的货物信息的计算中心,还包括设置在所述货架前的杆架,杆架上设置有至少一个垂直地面的导杆,还包括若干个可在仓储内移动并可沿导轨升降的机器人,所述机器人包括底座,底座上可移动地设置有用于从货架上取放货物的夹具,所述底座下设置有行走轮或履带,计算中心和所述机器人之间通过无线通信进行数据交互。本发明利用可以攀爬货架的机器人来取放货物,其可以实现精准的货物取放,也避免采用机械手等方式的较大投入,同时还节省空间。

一种基于集群仓储机器人的智能仓储系统.pdf
一种基于集群仓储机器人的智能仓储系统,它是由集群仓储机器人、货物存放区、机器人通行区和出货区组成;货物存放区用于存储货物和投放货物给集群仓储机器人,机器人通行区用于引导集群仓储机器人的运动,出货区用于集群仓储机器人卸载货物;集群仓储机器人通过机器人通行区前往货物存放区搬运货物,到达货物存放区装载货物后通过机器人通行区前往出货区卸载货物,然后再返回进入下一轮搬运作业;本发明针对集群仓储机器人系统的强拓展性、低耦合度、涌现性等特点对仓储系统内部布局分配和功能区分配进行优化设计,因此在多方面提升智能仓储的效率,

基于STM32的智能轮式仓储机器人.docx
基于STM32的智能轮式仓储机器人随着智能制造和物流业的迅速发展,仓储管理系统中的自动化设备开始变得越来越重要。针对仓储管理系统中自动化设备的需求,本文基于STM32设计了一款智能轮式仓储机器人。该机器人能够自主导航到指定位置,并精准地进行物料存储和搬运。一、系统架构智能轮式仓储机器人的系统架构主要包括以下部分:1.硬件部分:系统硬件主要以STM32为核心,包括电机驱动模块、传感器模块、导航模块和通信模块等。2.软件部分:系统软件主要包括嵌入式操作系统、控制算法和导航算法等。3.机械部分:系统机械主要包括

智能仓储机器人.pdf
本发明公开了一种智能仓储机器人,包括车体,车体上设置有顶升旋转单元与环境探测单元;顶升旋转单元包括升降平台,升降平台上设置有能可控地相对其旋转的旋转托盘;顶升旋转单元还包括至少一组驱动升降平台升降的驱动组件,驱动组件包括滑动设置在基板上的两个滑动块,滑动块上设置有顶升型面,两个滑动块可相对于基板等速反向滑动,升降平台上设置有与滑动块等数量的随动单元,随动单元与顶升型面之间为凸轮副配合关系。本发明的智能仓储机器人通过滑动块上的顶升型面与凸轮随动器的凸轮副配合实现旋转托盘的升降,通过大齿轮与小齿轮的啮合实现旋

一种基于智能机器人的物流仓储系统.pdf
本发明公布了一种基于智能机器人的物流仓储系统,包括引导走道、堆垛机构,堆垛机构包括放置在突起上的支撑板,在支撑板的底部安装有多个滚轮,支撑板上设有电机以及两个立柱,在两个立柱相对设置的侧壁上开有矩形槽,电机输出端连接有连杆,连杆贯穿两个立柱之中任意一个的侧壁置于矩形槽内,在矩形槽的上端安装有上齿轮,在连杆的端部安装有两个下齿轮,上齿轮通过齿带与下齿轮连接,在升降板上壁设有两个反向安装的气缸,在气缸输出端上安装有推板,行程开关通过控制器与电机电连接。在升降过程中,升降板上的货物保持以相对稳定的速度实现上升或