
一种基于相控阵超声波探伤仪的闸门检测装置及检测方法.pdf

静芙****可爱

1/9

2/9

3/9

4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于相控阵超声波探伤仪的闸门检测装置及检测方法.pdf
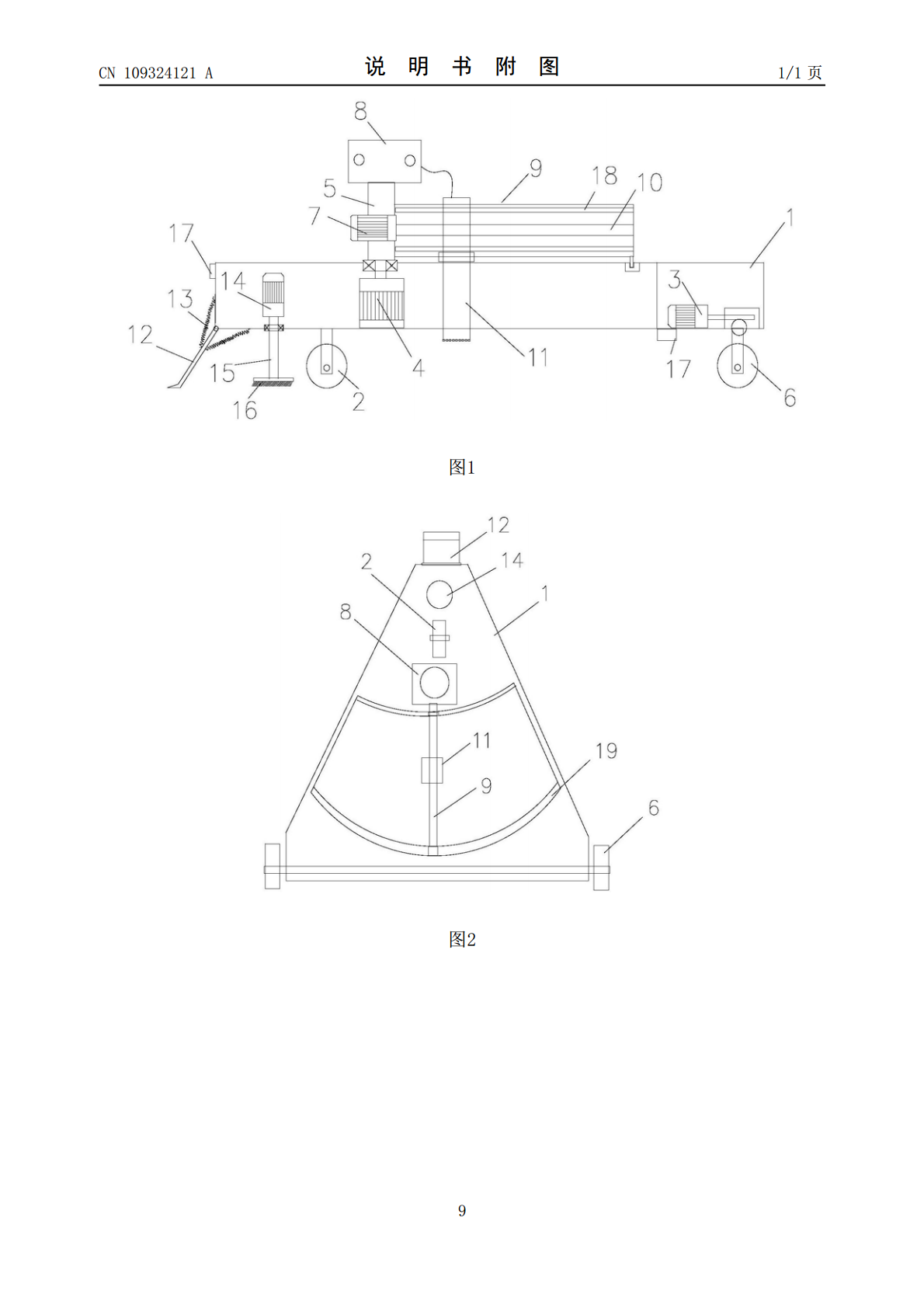
本发明公开了一种基于相控阵超声波探伤仪的闸门检测装置及检测方法,检测装置包括检测机构,检测机构包括支架,支架底部设置有导向轮和两个驱动轮,驱动轮通过第一电机驱动,支架上设置有控制器、超声波相控阵探伤仪。在检测过程中,第二电机驱动转动平台转动,带动转臂在扇形通孔上方上形区域中转动;同时,第三电机驱动丝杠转动带动,带动滑块和超声波相控阵矩阵探头沿丝杠长度方向移动;即超声波相控阵矩阵探头在沿闸门宽度方向移动时,同时在一定角度内扫射,则同时可以对闸门进行大面积的检测;超声波相控阵探伤仪检测信号传给控制器。本发明采

超声波相控阵探伤仪等设备技术参数超声波相控阵探伤仪技术.doc
超声波相控阵探伤仪等设备技术参数(一)超声波相控阵探伤仪技术参数一、设备用途及功能规定:重要用于检测金属及非金属材料内部及焊缝内部旳多种不持续性缺陷,包括复合材料旳脱粘、分层、粘接不良和金属材料及焊缝旳气孔、裂纹、沙眼等缺陷旳检出和定位定量。支持旳检测技术包超声波脉冲回波模式、一收一发模式、相控阵串列扫查模式及衍射时差(TOFD)模式,可以形成看待检工件区域旳彩色B扫描及C扫描图形显示,并能存储完整旳检测数据,具有良好旳再现性和检测成果一致性。二、重要技术参数及配置规定1、外观★1.1、便携式整机,以便户
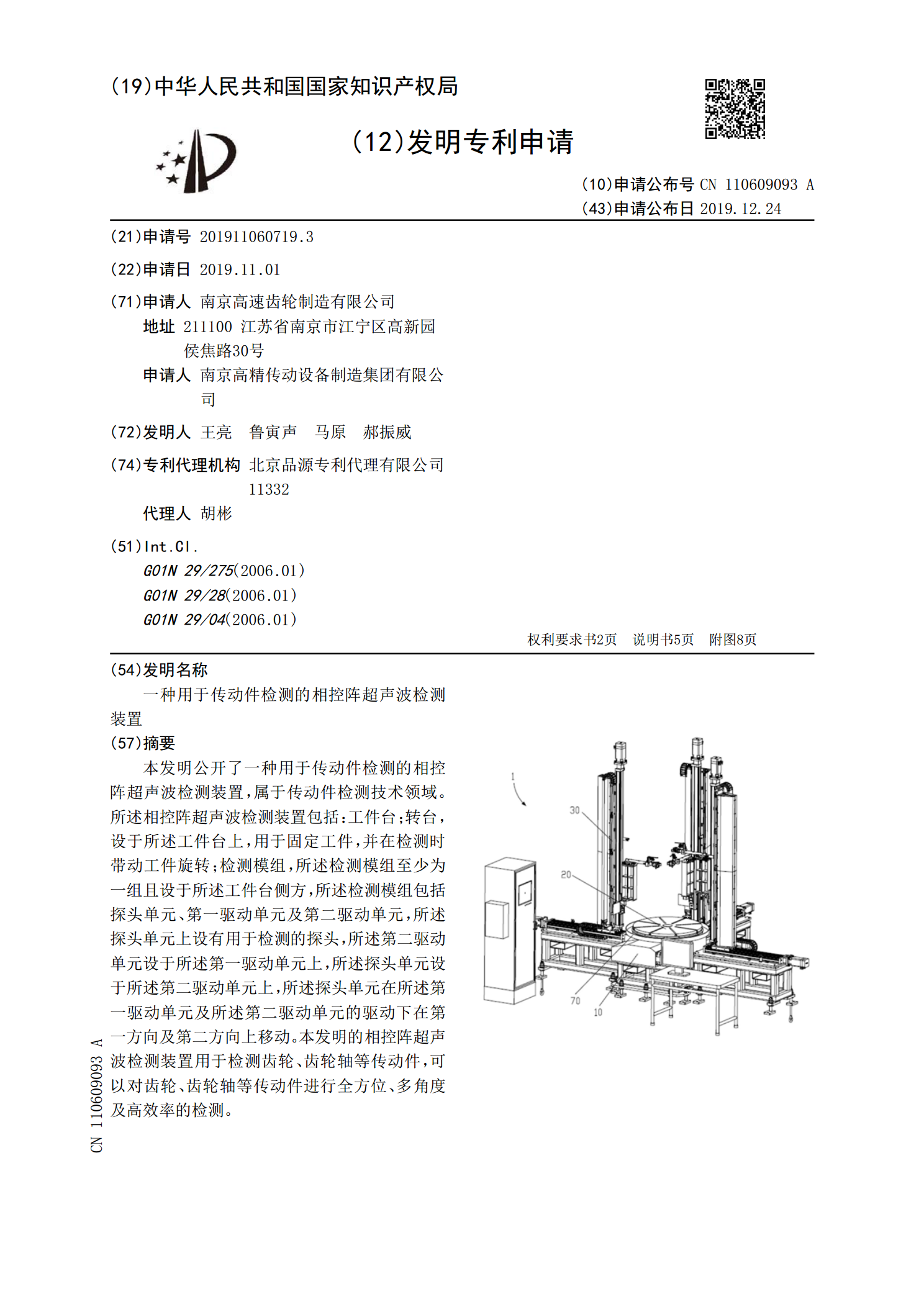
一种用于传动件检测的相控阵超声波检测装置.pdf
本发明公开了一种用于传动件检测的相控阵超声波检测装置,属于传动件检测技术领域。所述相控阵超声波检测装置包括:工件台;转台,设于所述工件台上,用于固定工件,并在检测时带动工件旋转;检测模组,所述检测模组至少为一组且设于所述工件台侧方,所述检测模组包括探头单元、第一驱动单元及第二驱动单元,所述探头单元上设有用于检测的探头,所述第二驱动单元设于所述第一驱动单元上,所述探头单元设于所述第二驱动单元上,所述探头单元在所述第一驱动单元及所述第二驱动单元的驱动下在第一方向及第二方向上移动。本发明的相控阵超声波检测装置用
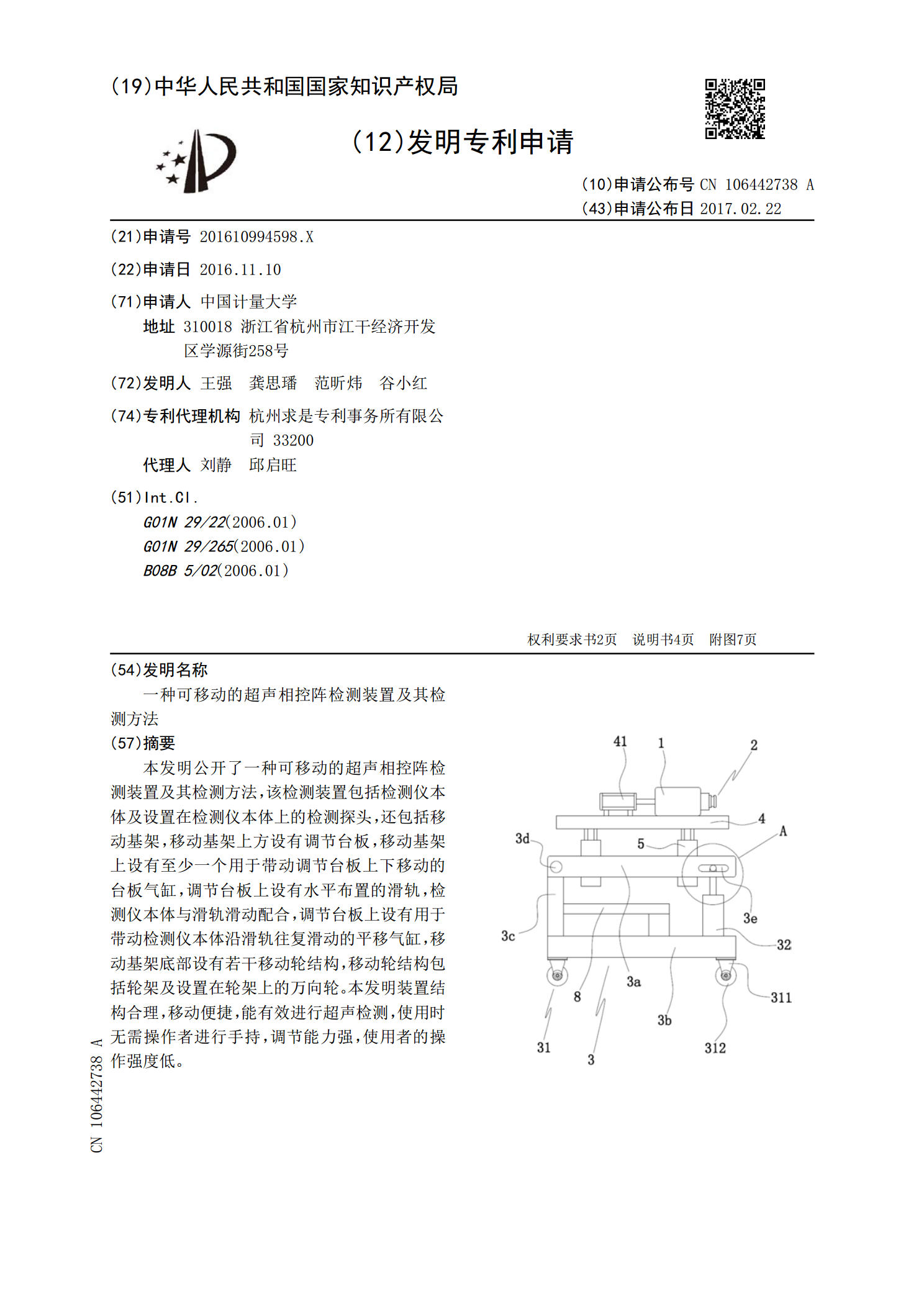
一种可移动的超声相控阵检测装置及其检测方法.pdf
本发明公开了一种可移动的超声相控阵检测装置及其检测方法,该检测装置包括检测仪本体及设置在检测仪本体上的检测探头,还包括移动基架,移动基架上方设有调节台板,移动基架上设有至少一个用于带动调节台板上下移动的台板气缸,调节台板上设有水平布置的滑轨,检测仪本体与滑轨滑动配合,调节台板上设有用于带动检测仪本体沿滑轨往复滑动的平移气缸,移动基架底部设有若干移动轮结构,移动轮结构包括轮架及设置在轮架上的万向轮。本发明装置结构合理,移动便捷,能有效进行超声检测,使用时无需操作者进行手持,调节能力强,使用者的操作强度低。
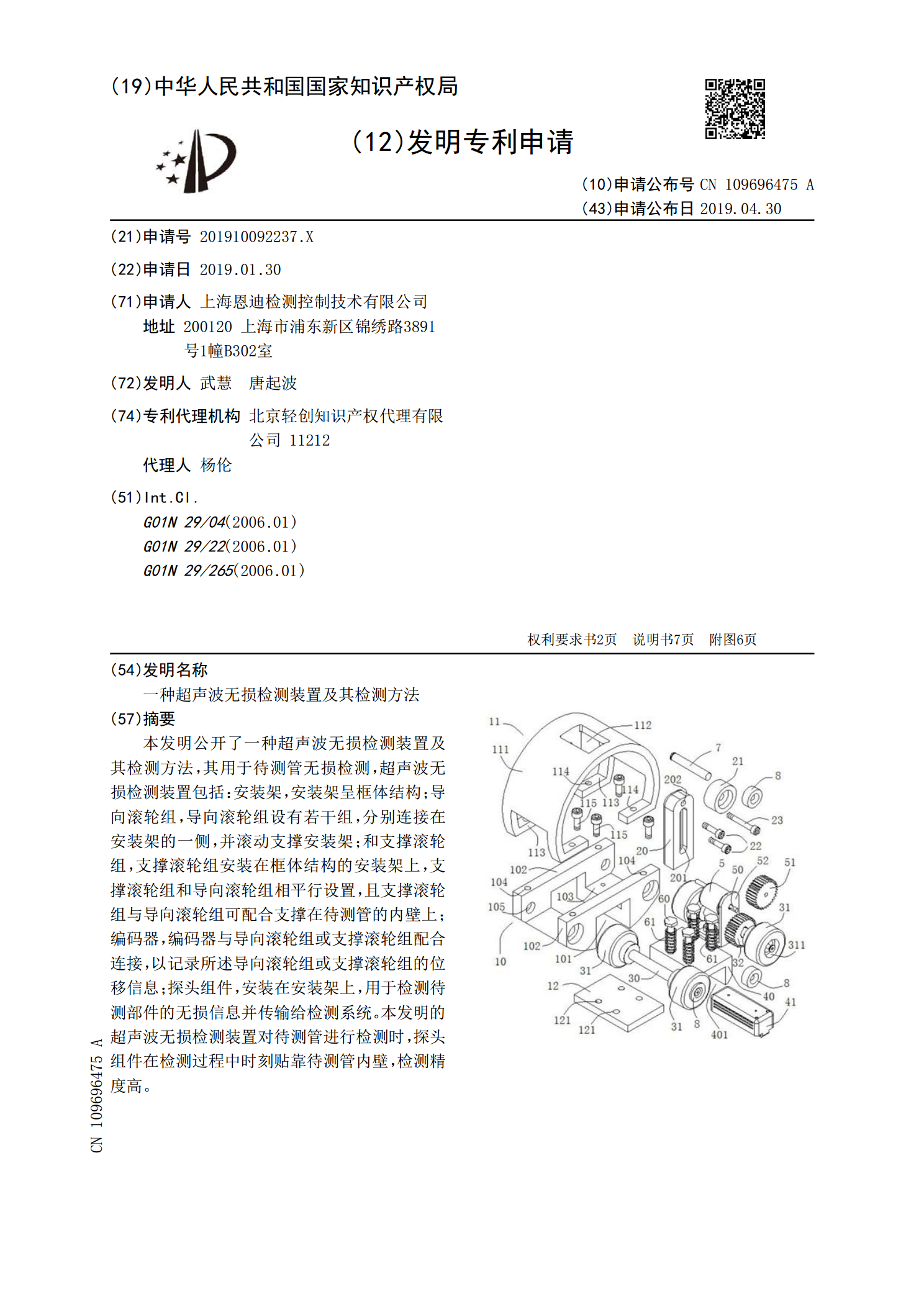
一种超声波无损检测装置及其检测方法.pdf
本发明公开了一种超声波无损检测装置及其检测方法,其用于待测管无损检测,超声波无损检测装置包括:安装架,安装架呈框体结构;导向滚轮组,导向滚轮组设有若干组,分别连接在安装架的一侧,并滚动支撑安装架;和支撑滚轮组,支撑滚轮组安装在框体结构的安装架上,支撑滚轮组和导向滚轮组相平行设置,且支撑滚轮组与导向滚轮组可配合支撑在待测管的内壁上;编码器,编码器与导向滚轮组或支撑滚轮组配合连接,以记录所述导向滚轮组或支撑滚轮组的位移信息;探头组件,安装在安装架上,用于检测待测部件的无损信息并传输给检测系统。本发明的超声波无