
一种基于齿轮驱动的双向变角度定日镜控制机构.pdf

一吃****仪凡

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于齿轮驱动的双向变角度定日镜控制机构.pdf
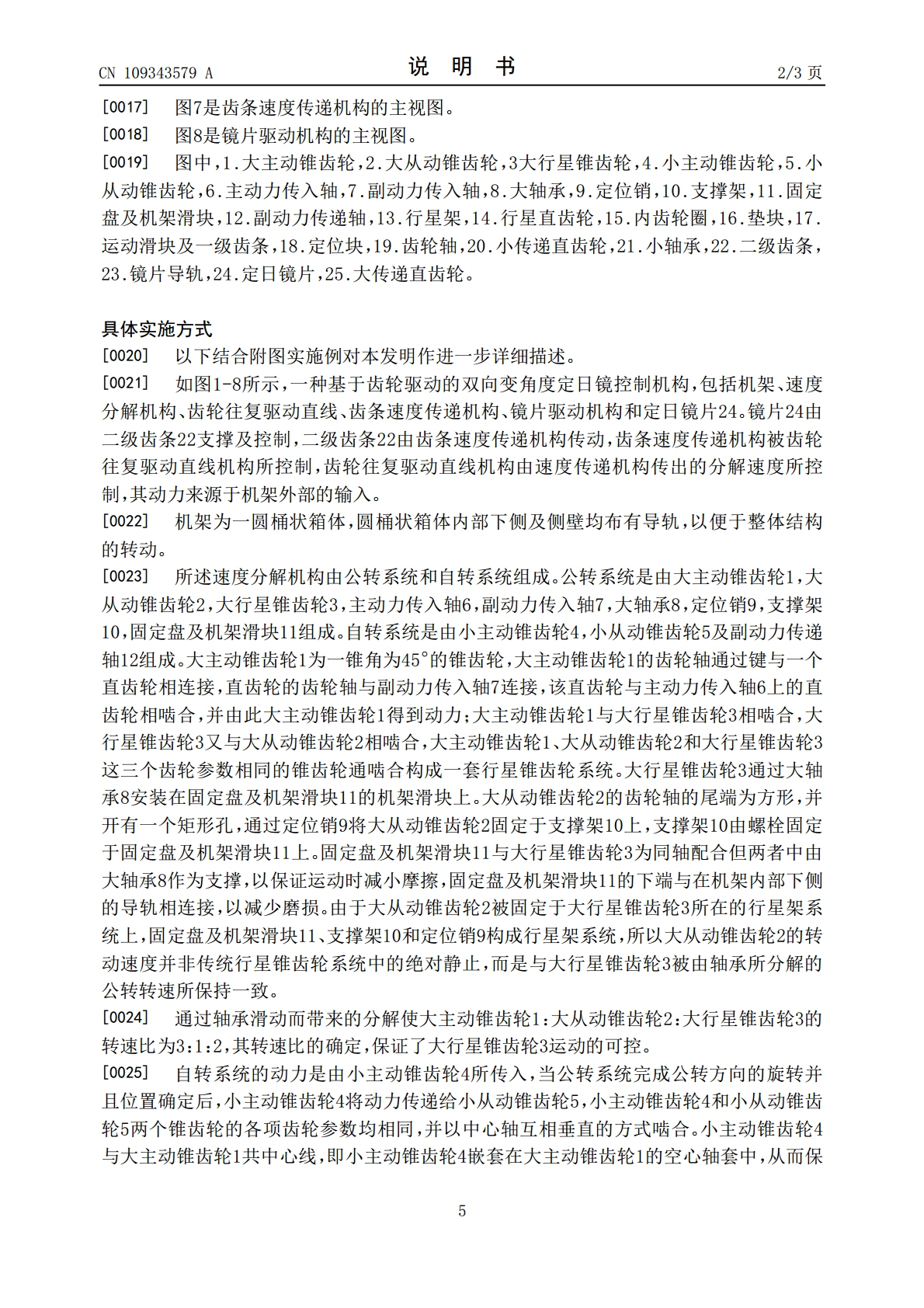
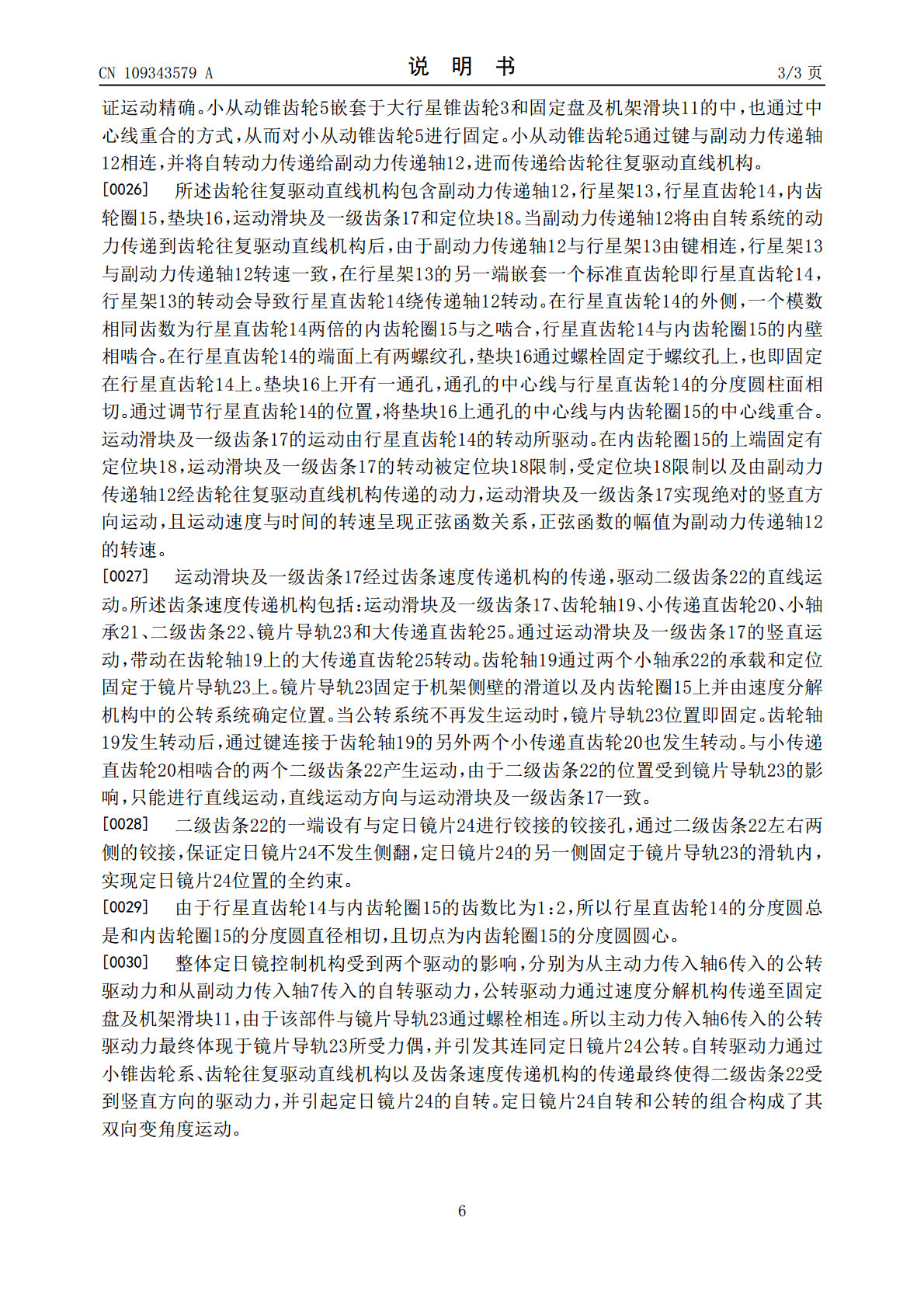
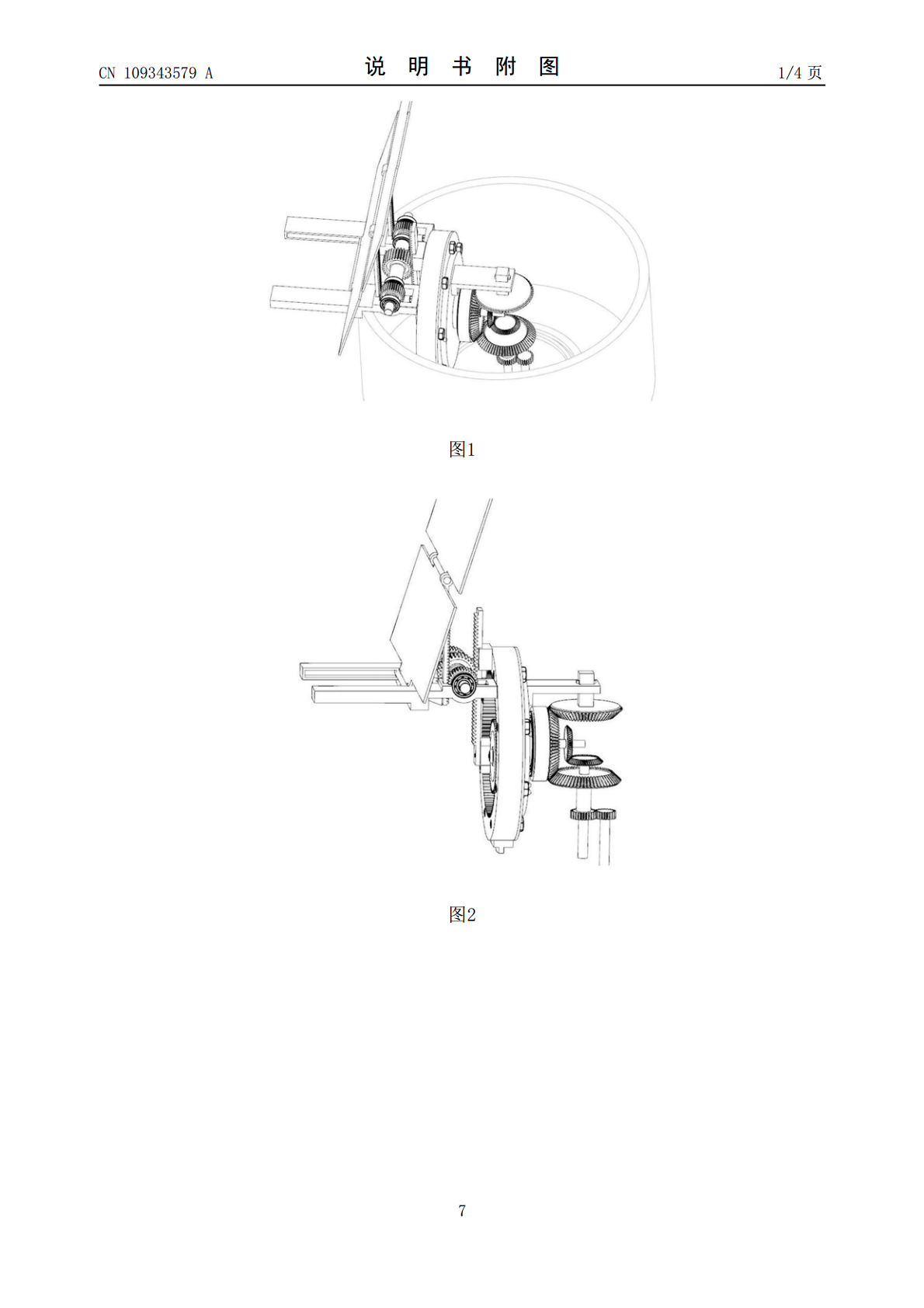
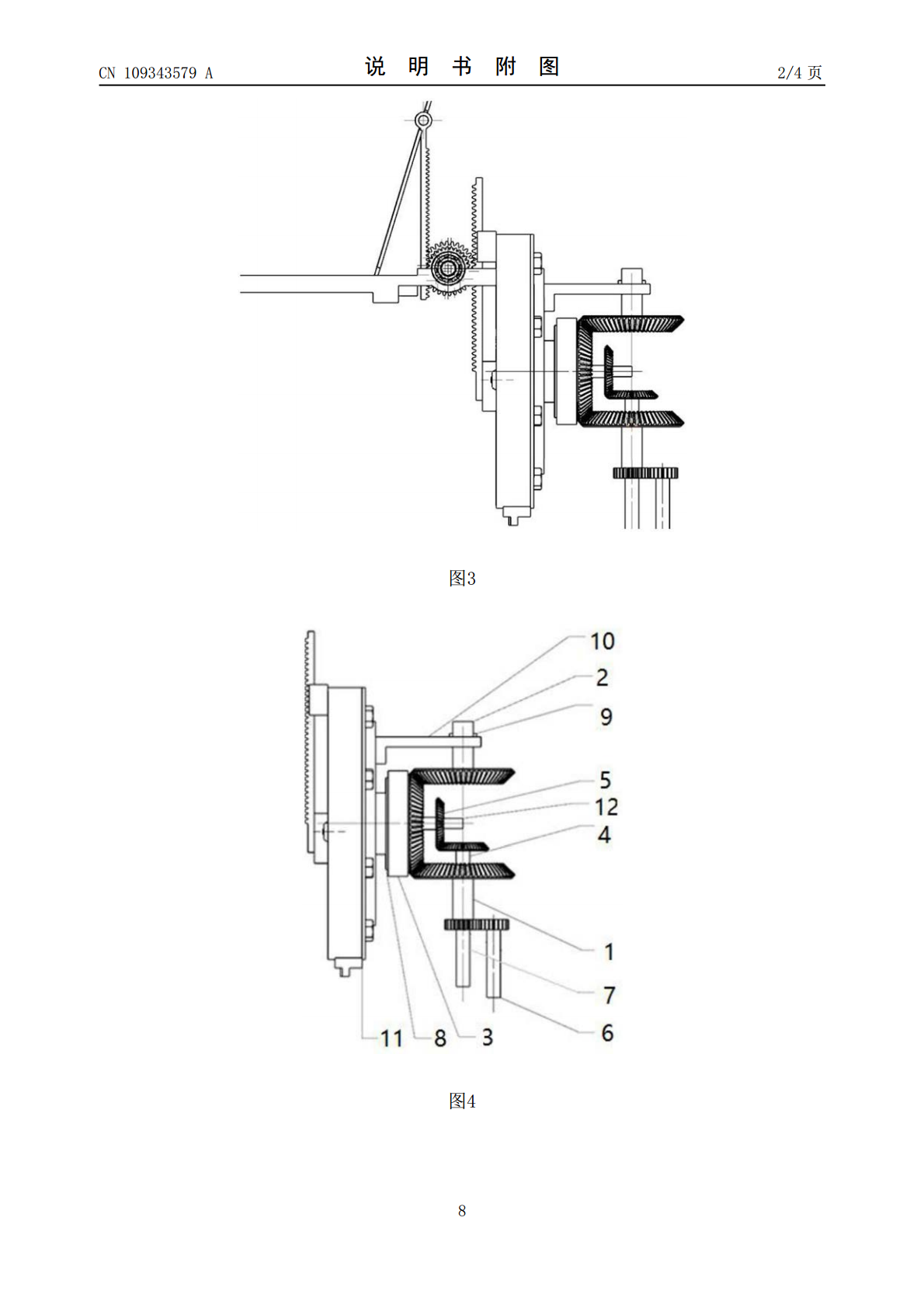
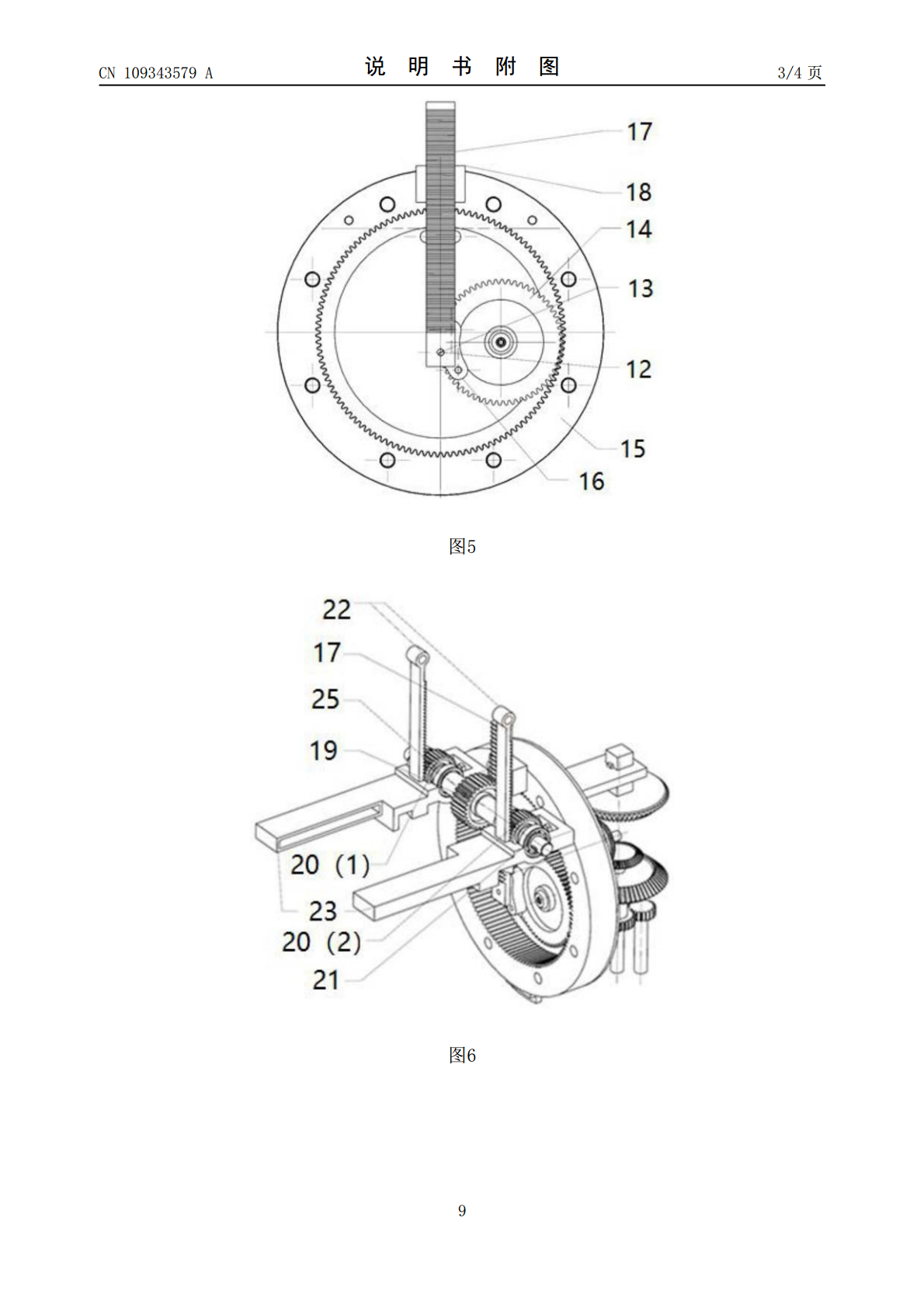
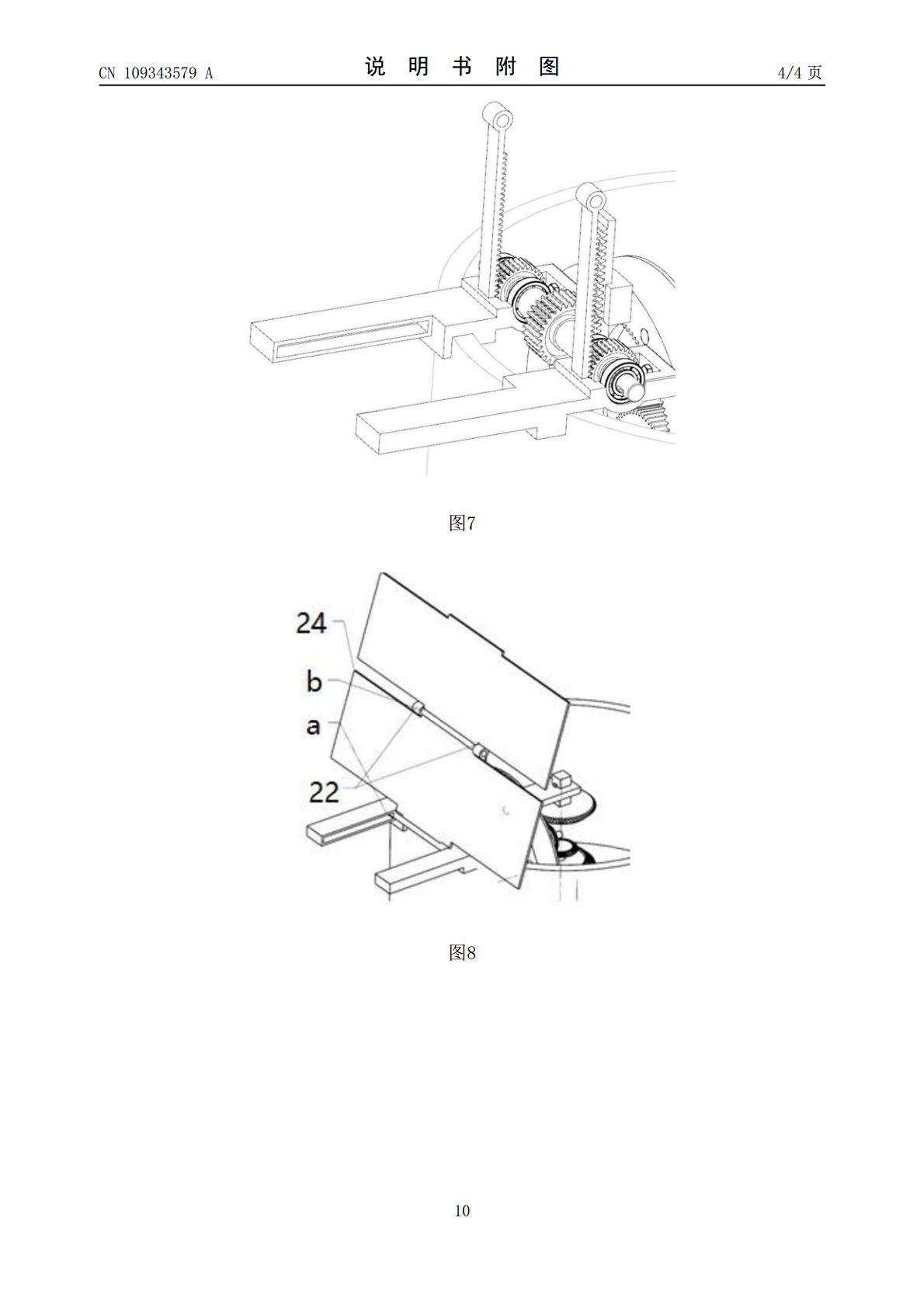
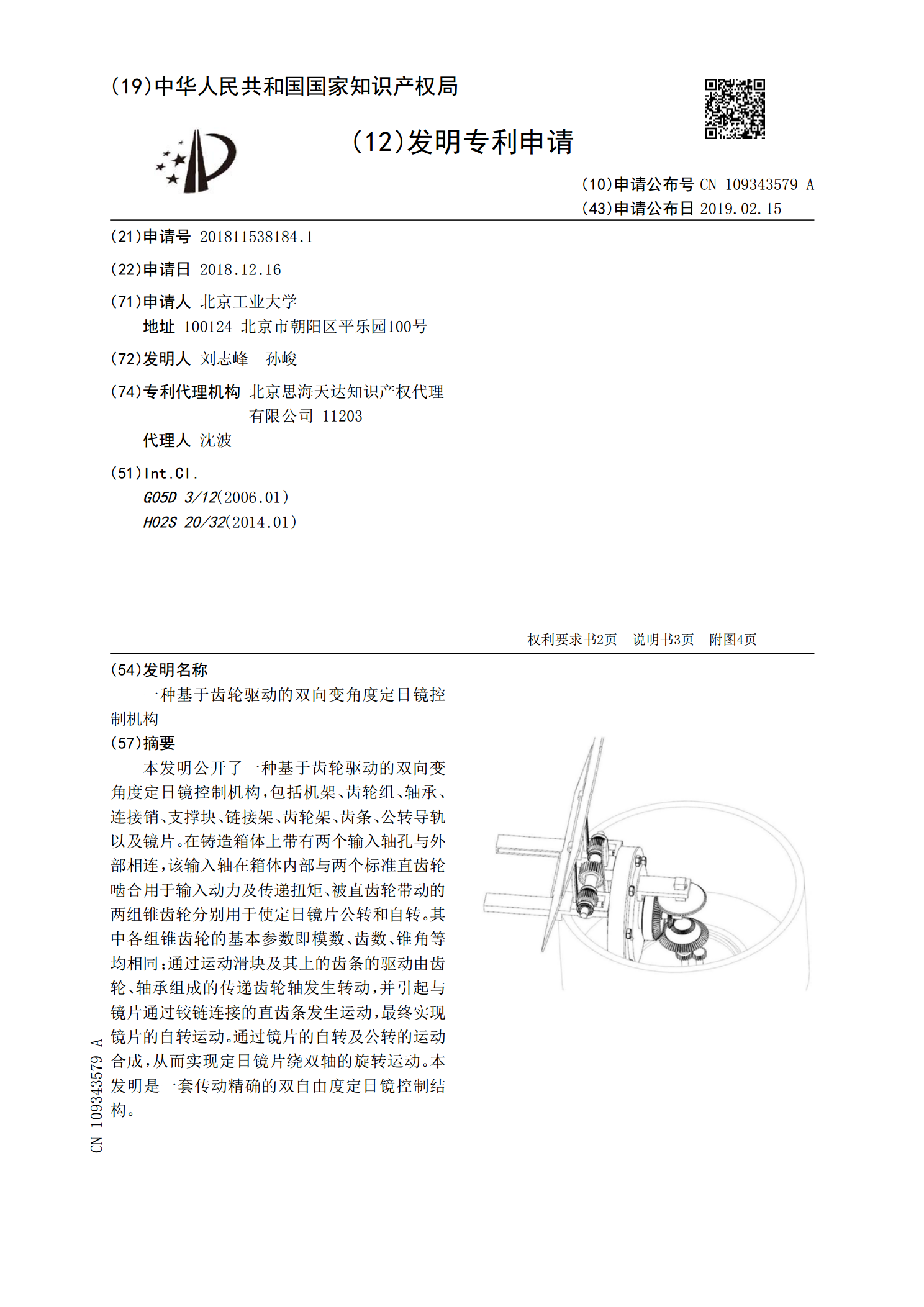
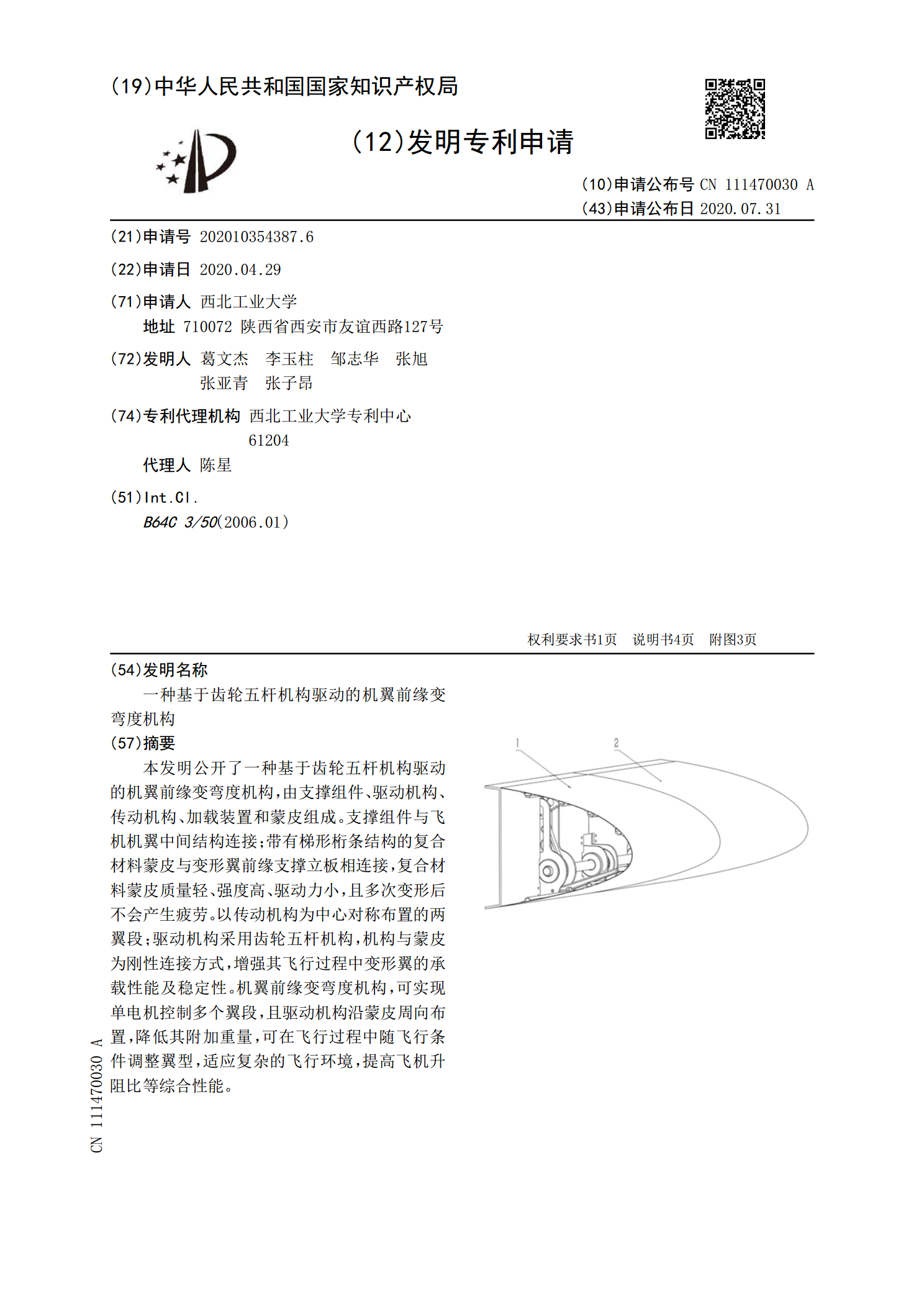
本发明公开了一种基于齿轮驱动的双向变角度定日镜控制机构,包括机架、齿轮组、轴承、连接销、支撑块、链接架、齿轮架、齿条、公转导轨以及镜片。在铸造箱体上带有两个输入轴孔与外部相连,该输入轴在箱体内部与两个标准直齿轮啮合用于输入动力及传递扭矩、被直齿轮带动的两组锥齿轮分别用于使定日镜片公转和自转。其中各组锥齿轮的基本参数即模数、齿数、锥角等均相同;通过运动滑块及其上的齿条的驱动由齿轮、轴承组成的传递齿轮轴发生转动,并引起与镜片通过铰链连接的直齿条发生运动,最终实现镜片的自转运动。通过镜片的自转及公转的运动合成,
一种基于齿轮五杆机构驱动的机翼前缘变弯度机构.pdf
本发明公开了一种基于齿轮五杆机构驱动的机翼前缘变弯度机构,由支撑组件、驱动机构、传动机构、加载装置和蒙皮组成。支撑组件与飞机机翼中间结构连接;带有梯形桁条结构的复合材料蒙皮与变形翼前缘支撑立板相连接,复合材料蒙皮质量轻、强度高、驱动力小,且多次变形后不会产生疲劳。以传动机构为中心对称布置的两翼段;驱动机构采用齿轮五杆机构,机构与蒙皮为刚性连接方式,增强其飞行过程中变形翼的承载性能及稳定性。机翼前缘变弯度机构,可实现单电机控制多个翼段,且驱动机构沿蒙皮周向布置,降低其附加重量,可在飞行过程中随飞行条件调整翼
一种双向安装式齿轮驱动机构.pdf
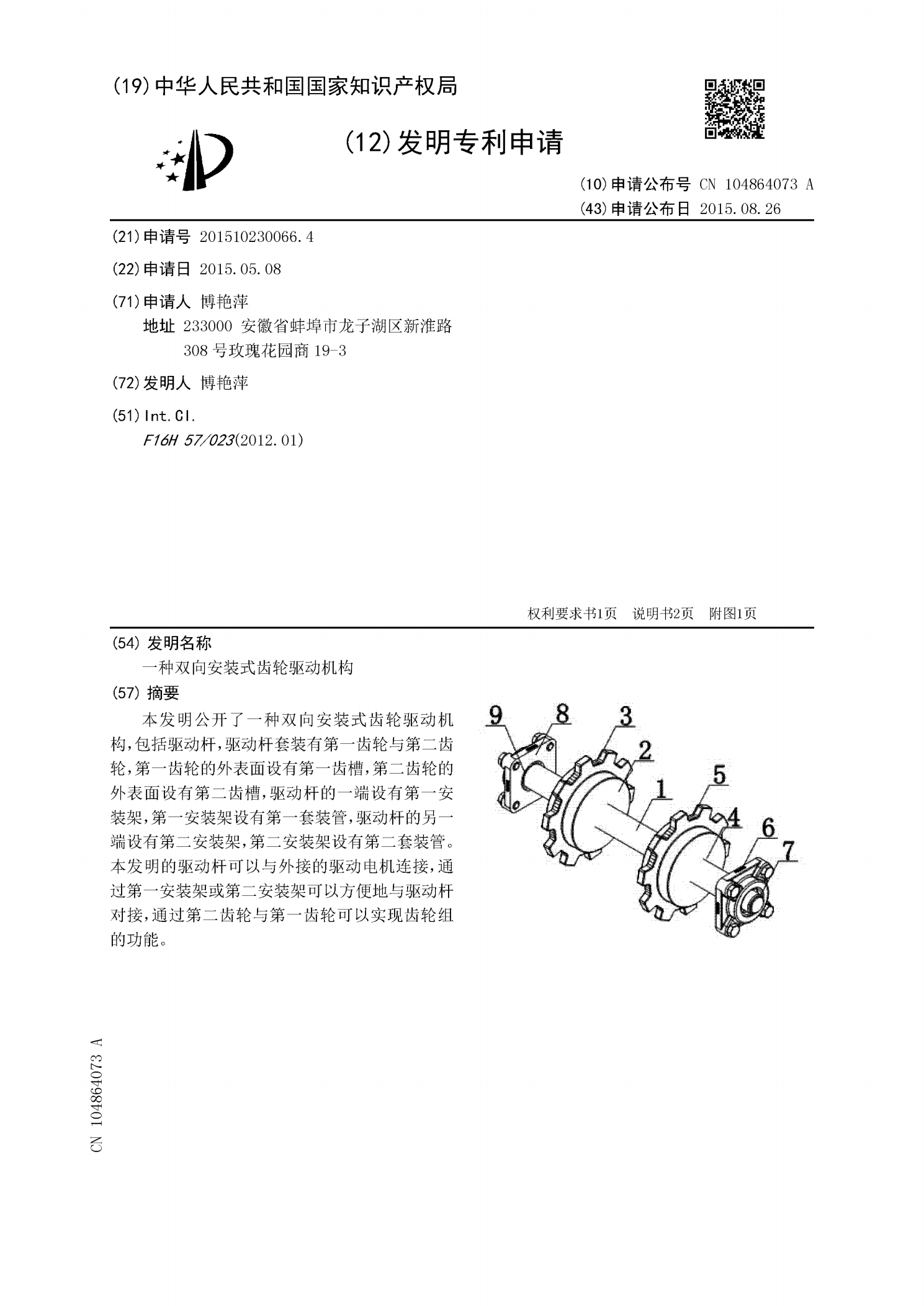
本发明公开了一种双向安装式齿轮驱动机构,包括驱动杆,驱动杆套装有第一齿轮与第二齿轮,第一齿轮的外表面设有第一齿槽,第二齿轮的外表面设有第二齿槽,驱动杆的一端设有第一安装架,第一安装架设有第一套装管,驱动杆的另一端设有第二安装架,第二安装架设有第二套装管。本发明的驱动杆可以与外接的驱动电机连接,通过第一安装架或第二安装架可以方便地与驱动杆对接,通过第二齿轮与第一齿轮可以实现齿轮组的功能。

塔式太阳能定日镜锥齿轮光线角度转换控制装置.pdf
本发明涉及太阳能技术领域,尤其涉及一种塔式太阳能定日镜锥齿轮光线角度转换控制装置。这种塔式太阳能定日镜锥齿轮光线角度转换控制装置的反射锥齿轮和入射锥齿轮同轴心,过渡锥齿轮的轴向与反射锥齿轮、入射锥齿轮的轴向垂直,反射锥齿轮和过渡锥齿轮啮合,过渡锥齿轮和入射锥齿轮啮合,所述反射锥齿轮、过渡锥齿轮和入射锥齿轮置于齿轮座上,所述反射锥齿轮与反射轴相对固定连接,所述入射锥齿轮和入射轴相对固定连接,所述光电探头安装在入射轴上,齿轮座置于定日镜上,反射轴与连接杆呈旋转式连接。该装置安装运行调控非常简单,提高了定日镜对

塔式太阳能定日镜圆柱齿轮光线角度转换控制装置.pdf
本发明涉及塔式聚光太阳能集热、聚光太阳能光热发电和聚光光伏技术领域,尤其是一种塔式太阳能定日镜圆柱齿轮光线角度转换控制装置。该装置上设有反射齿轮、反射过渡齿轮、入射过渡齿轮、入射齿轮,反射齿轮和反射过渡齿轮啮合,反射过渡齿轮和入射过渡齿轮啮合,入射过渡齿轮和入射齿轮啮合;反射齿轮和入射齿轮同轴心。所有齿轮均安装在齿轮座上;反射齿轮和反射轴相对固定;入射齿轮和入射轴相对固定;光电探头安装在入射轴上;齿轮座安装在定日镜上;反射轴与连接杆连接且只可作旋转运动,并且安装连接杆固定在地面。这就可以方便快捷完成定日镜