
钢轨廓形的追踪方法、系统及装置.pdf

大渊****公主

1/10

2/10

3/10
4/10
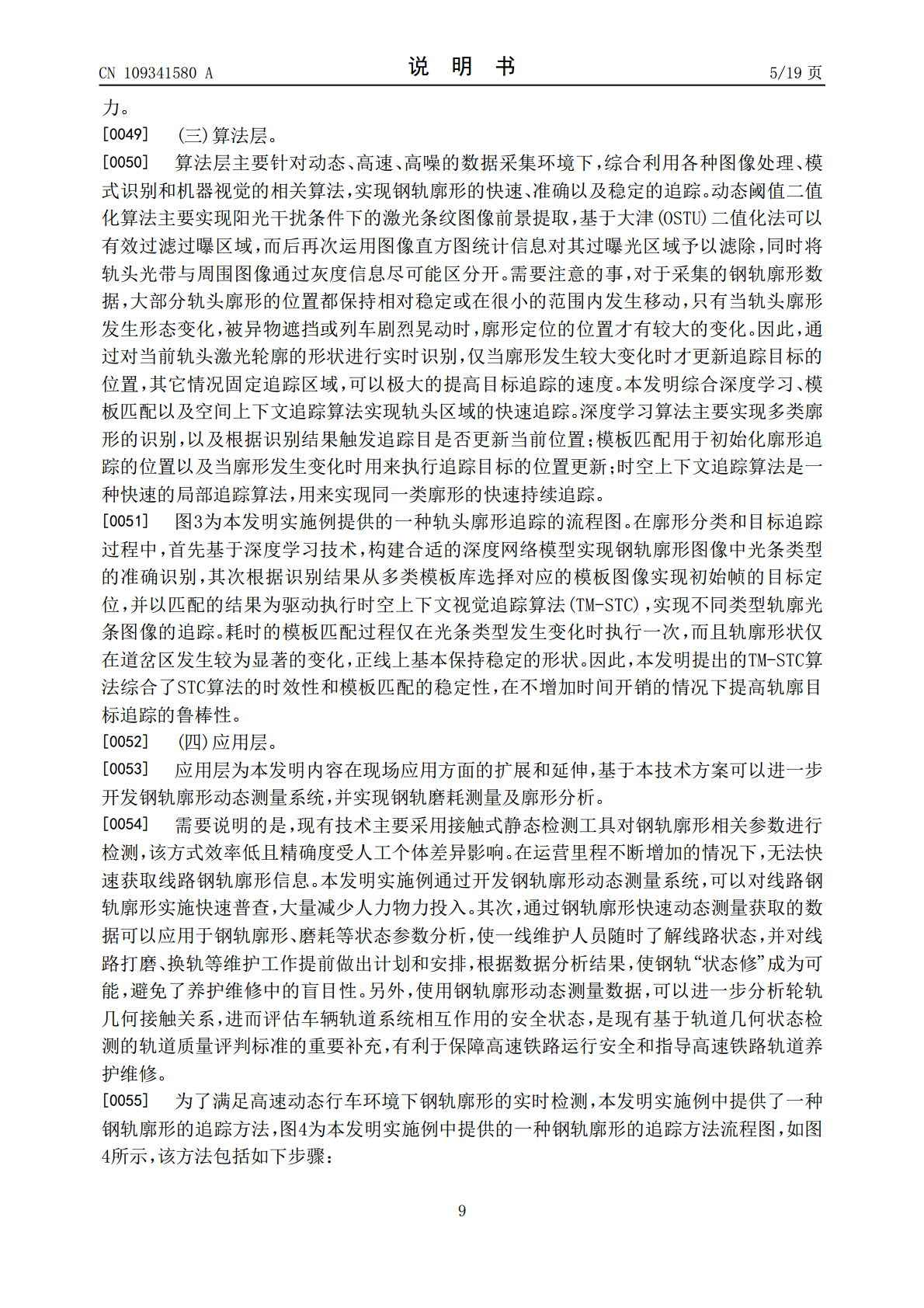
5/10

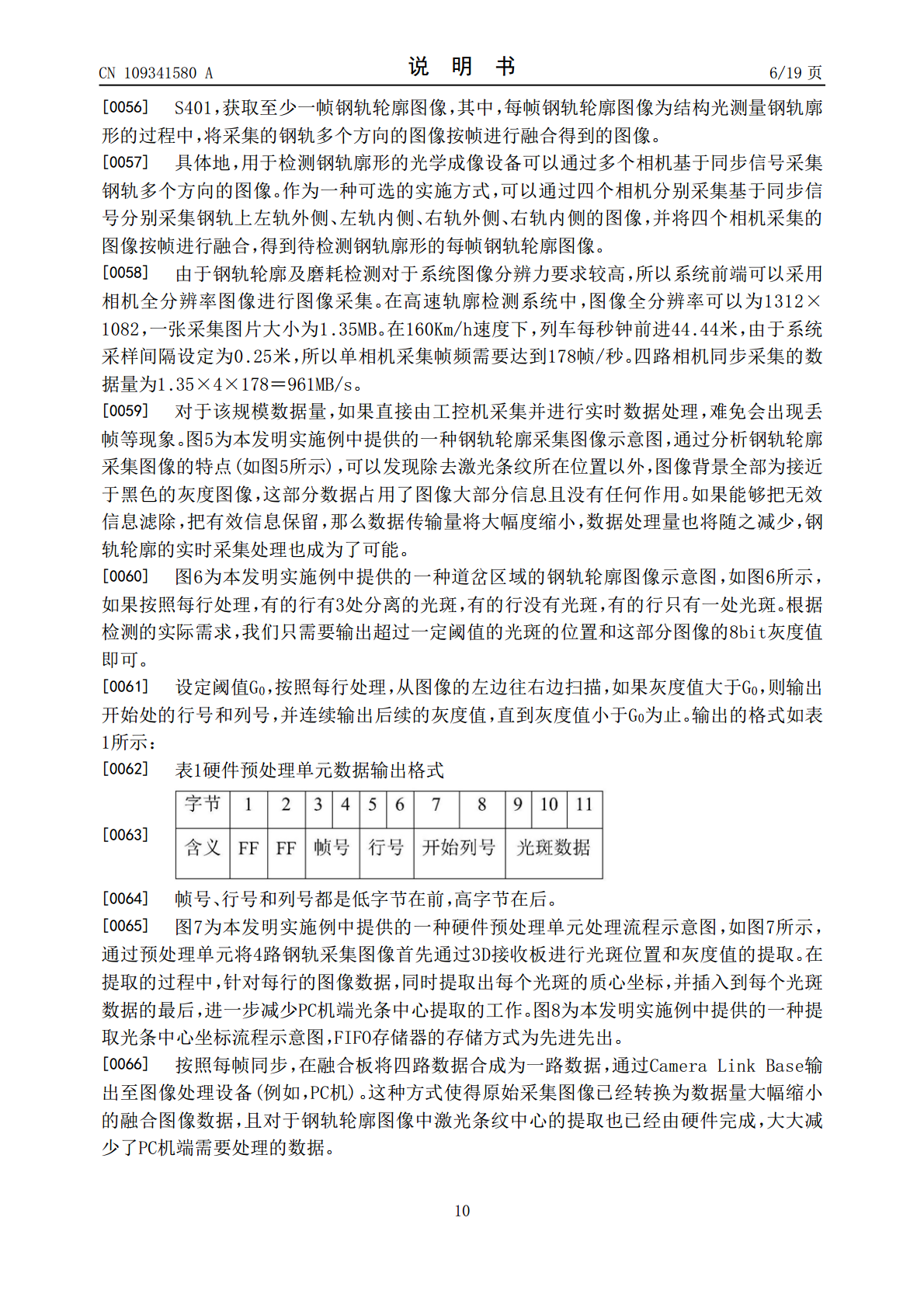
6/10
7/10

8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

钢轨廓形的追踪方法、系统及装置.pdf
本发明公开了一种钢轨廓形的追踪方法、系统及装置,该方法包括:获取至少一帧钢轨轮廓图像,其中,每帧钢轨轮廓图像为结构光测量钢轨廓形的过程中,将采集的钢轨多个方向的图像按帧进行融合得到的图像;基于深度学习的廓形识别模型,识别每帧钢轨轮廓图像中激光条纹的光条类型;在当前帧与上一帧钢轨轮廓图像中激光条纹的光条类型相同的情况下,基于时空上下文视觉跟踪算法,追踪当前帧钢轨轮廓图像中目标条纹的位置;或在当前帧与上一帧钢轨轮廓图像中激光条纹的光条类型不相同的情况下,基于模板匹配算法,追踪当前帧钢轨轮廓图像中目标条纹的位置

基于偏振分光的钢轨廓形检测方法、系统及装置.pdf
本发明公开了一种基于偏振分光的钢轨廓形检测方法、系统及装置,该方法包括:获取钢轨表面反射光的P分量偏振图像和S分量偏振图像,其中,钢轨表面反射光经偏振分光棱镜分解为振动平面互相垂直的P分量透射光和S分量反射光,P分量偏振图像为P分量透射光形成的图像,S分量偏振图像为S分量反射光形成的图像;根据P分量偏振图像和S分量偏振图像,确定钢轨表面反射光的总强度图像;对P分量偏振图像、S分量偏振图像和总强度图像进行融合处理,得到融合图像;根据融合图像,提取钢轨廓形数据。本发明能够获得无局部过曝现象的高质量钢轨廓形光条
钢轨廓形对齐方法及装置、钢轨磨耗计算方法及装置.pdf
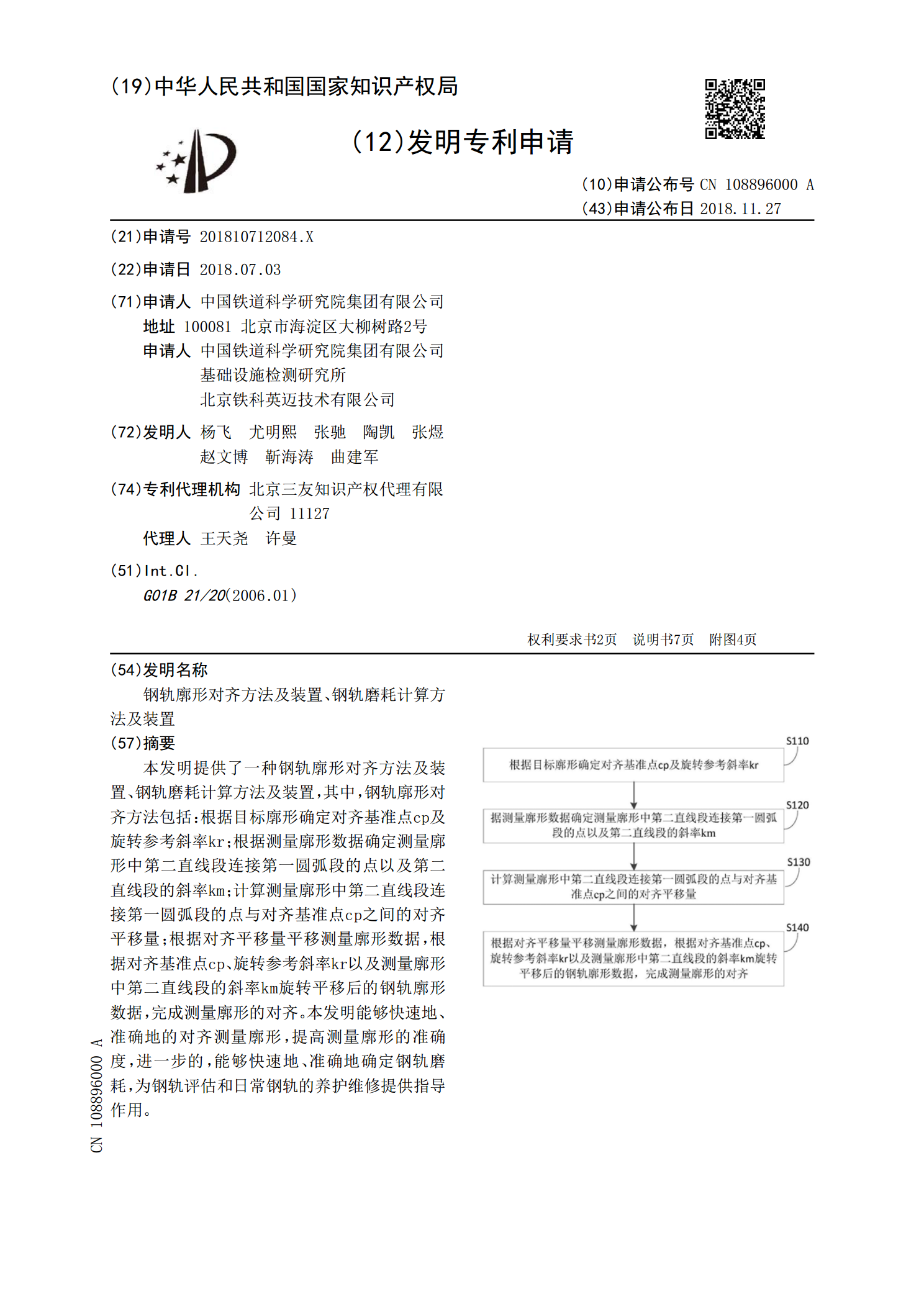
本发明提供了一种钢轨廓形对齐方法及装置、钢轨磨耗计算方法及装置,其中,钢轨廓形对齐方法包括:根据目标廓形确定对齐基准点cp及旋转参考斜率kr;根据测量廓形数据确定测量廓形中第二直线段连接第一圆弧段的点以及第二直线段的斜率km;计算测量廓形中第二直线段连接第一圆弧段的点与对齐基准点cp之间的对齐平移量;根据对齐平移量平移测量廓形数据,根据对齐基准点cp、旋转参考斜率kr以及测量廓形中第二直线段的斜率km旋转平移后的钢轨廓形数据,完成测量廓形的对齐。本发明能够快速地、准确地的对齐测量廓形,提高测量廓形的准确度

道岔区域的钢轨廓形打磨方法及装置.pdf
本发明提供了道岔区域的钢轨廓形打磨方法及装置,涉及道岔区域的钢轨打磨领域。本发明提供的道岔区域的钢轨廓形打磨方法,首先通过轮廓测量仪测量道岔区域的钢轨的实际廓形;而后,将所述实际廓形和道岔区域的钢轨的目标廓形进行比较,以确定道岔区域的钢轨的打磨策略;其中,所述打磨策略至少包括指定打磨位置的打磨量;最后,按照确定的所述打磨策略对道岔区域的钢轨进行打磨。由于使用了轮廓测量仪进行采集和使用目标廓形作为参照,使得对道岔区域的钢轨的打磨更为精准了。

钢轨廓形动态拼接处理方法及装置.pdf
本发明公开了一种钢轨廓形动态拼接处理方法及装置,其中该方法包括:获取钢轨廓形拼接参数的初始值;基于该初始值,利用迭代最近点法ICP迭代确定每一周期对应的钢轨廓形数据点,每个迭代周期均执行以下操作:根据当前周期的钢轨廓形拼接参数,以及预先建立的ICP匹配的目标函数,得到当前周期对应的钢轨廓形数据点;目标函数用于降低远端廓形点集的权重;在不满足预设迭代结束条件时,将当前周期钢轨廓形对应的横向平移参数乘以预设横向平移修正参数作为下一迭代周期对应的钢轨廓形拼接参数;在满足预设迭代结束条件时,根据满足预设迭代结束条