
一种基于ROS的AGV及其使用方法.pdf

康平****ng


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于ROS的AGV及其使用方法.pdf
本发明公开了一种基于ROS的AGV,包括车身主体、雷达、上位机、电池组、控制电路、防碰撞传感器、伺服电机及驱动轮,所述雷达、所述控制电路分别与所述上位机通讯连接,所述电池组与所述上位机电联接,所述控制电路与所述伺服电机及驱动轮通讯连接,所述防碰撞传感器与所述控制电路通讯连接,所述防碰撞传感器安装设置于所述车身主体的周围,所述上位机、所述电池组、所述控制电路均设置于所述车身主体的中部。本发明还提出一种基于ROS的AGV的使用方法,实现了自动化仓储系统自动运输的功能。
一种基于ROS的智能轮椅及其使用方法.pdf
本发明公开了一种基于ROS的智能轮椅,包括轮椅主体,所述智能轮椅包括麦克风、上位机、电池组、控制电路、伺服电机、Kinect视觉传感器、LCD显示屏,所述Kinect视觉传感器、所述控制电路、所述麦克风分别与所述上位机通讯连接,所述LCD显示屏与所述上位机通讯连接,所述上位机、所述伺服电机分别与所述电池组电联接,所述控制电路与所述伺服电机通讯连接。本发明还公开一种基于ROS的智能轮椅的使用方法,实现了智能轮椅自主导航,语音控制等功能。
一种基于ROS的工厂AGV路径规划方法.pdf
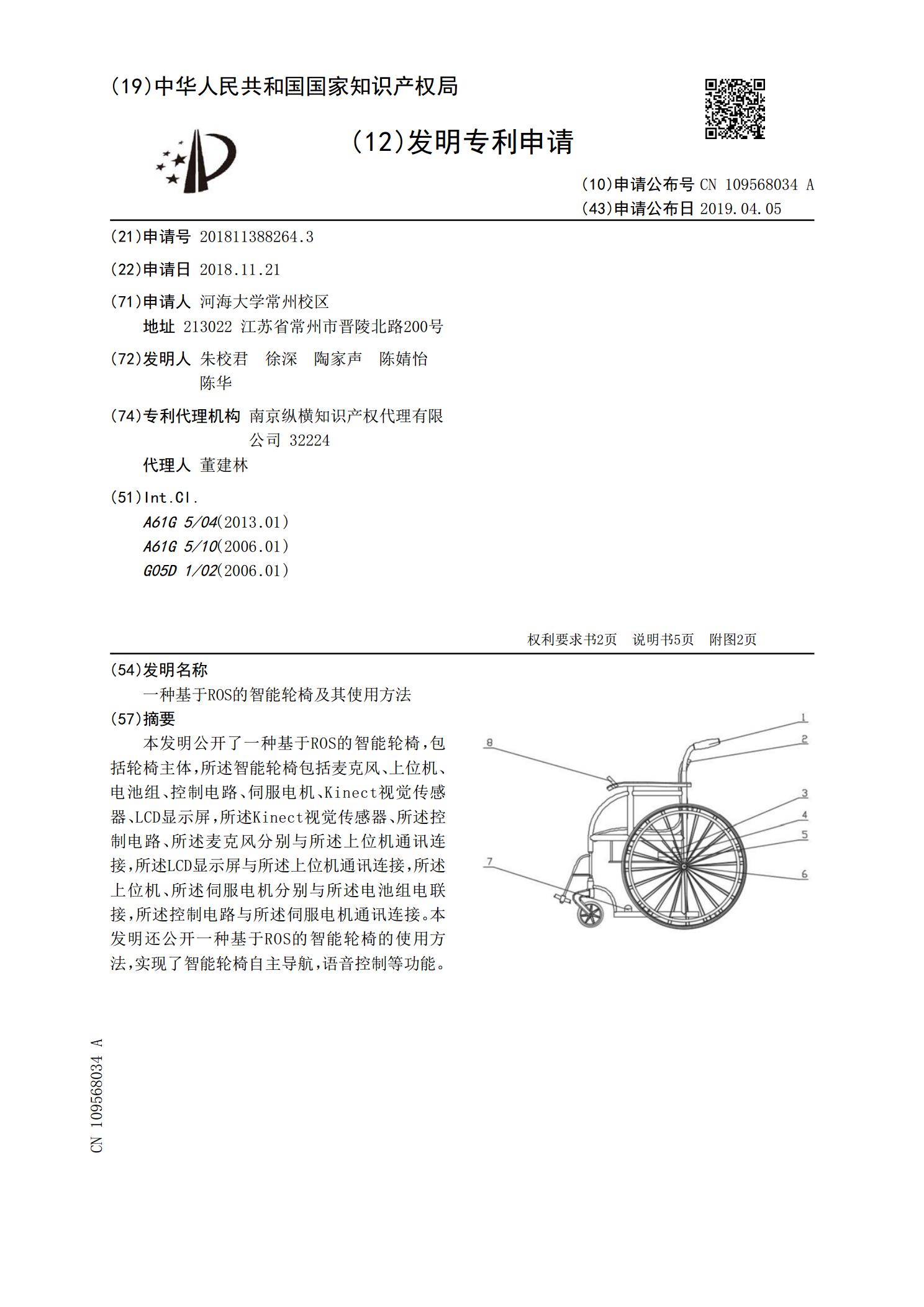
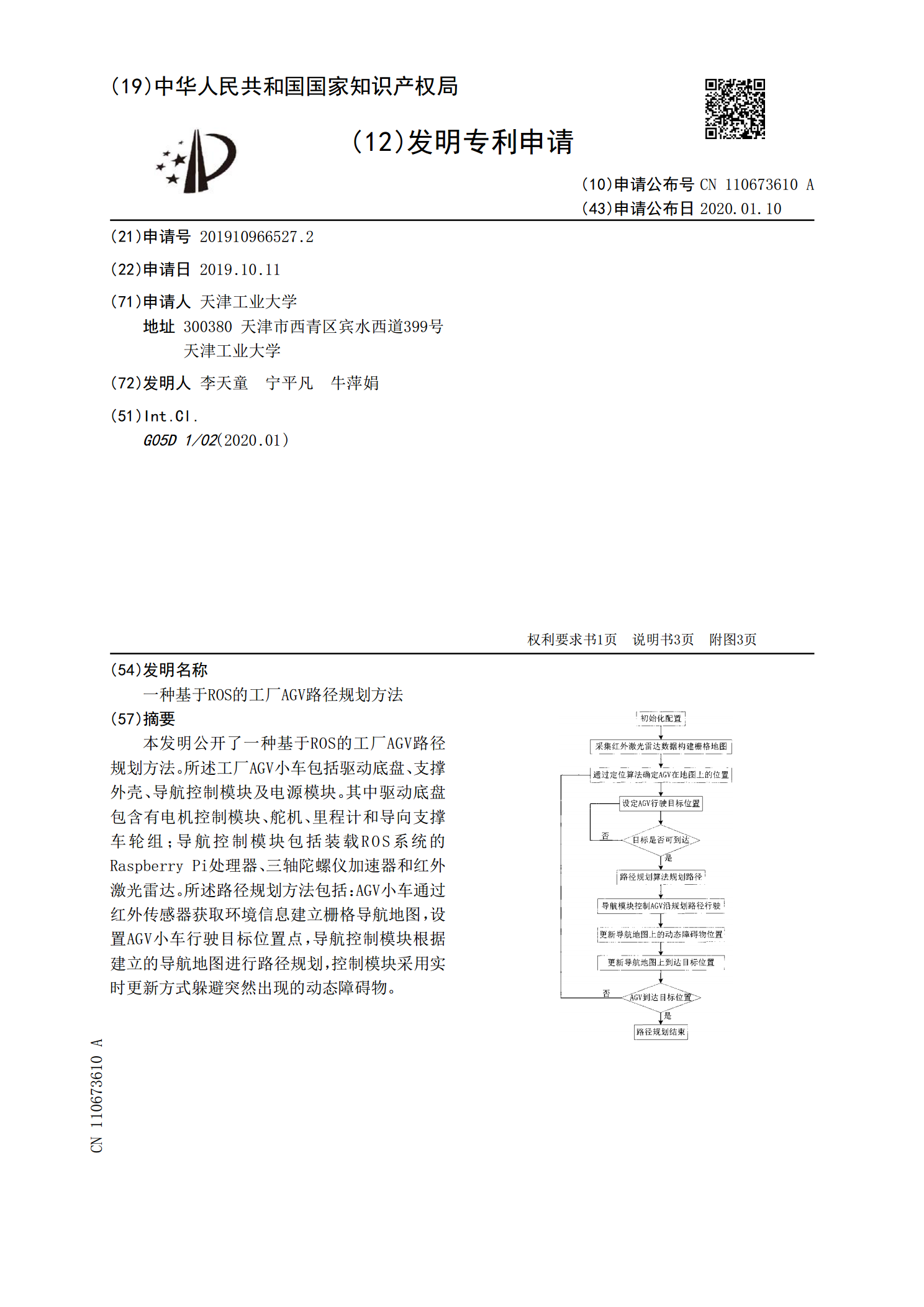
本发明公开了一种基于ROS的工厂AGV路径规划方法。所述工厂AGV小车包括驱动底盘、支撑外壳、导航控制模块及电源模块。其中驱动底盘包含有电机控制模块、舵机、里程计和导向支撑车轮组;导航控制模块包括装载ROS系统的RaspberryPi处理器、三轴陀螺仪加速器和红外激光雷达。所述路径规划方法包括:AGV小车通过红外传感器获取环境信息建立栅格导航地图,设置AGV小车行驶目标位置点,导航控制模块根据建立的导航地图进行路径规划,控制模块采用实时更新方式躲避突然出现的动态障碍物。

基于ROS架构的叉车型AGV控制系统设计开发研究.docx
基于ROS架构的叉车型AGV控制系统设计开发研究目录一、内容概览................................................21.研究背景和意义........................................22.国内外研究现状及发展趋势..............................43.研究目的与任务........................................5二、ROS架构概述....................
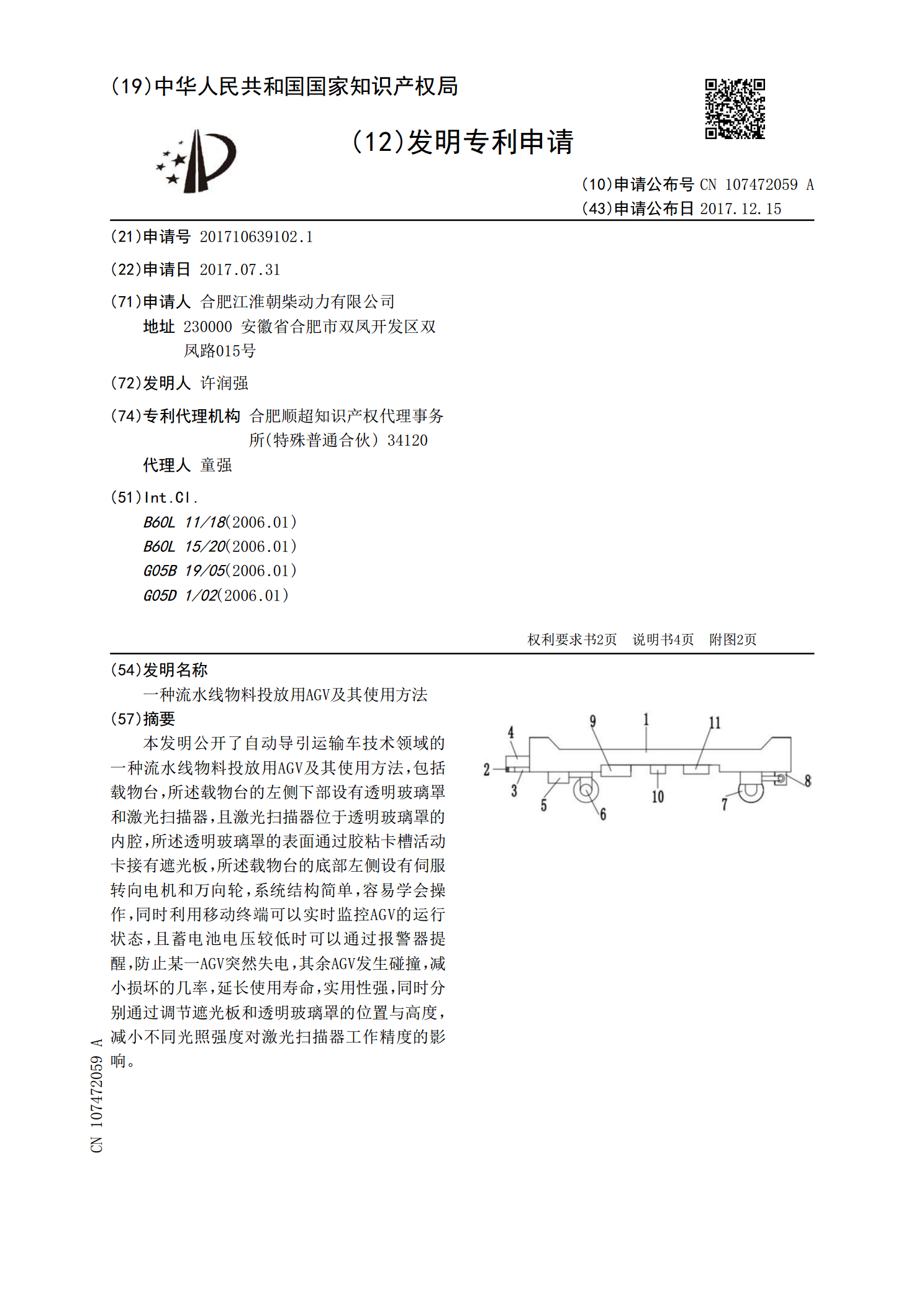
一种流水线物料投放用AGV及其使用方法.pdf
本发明公开了自动导引运输车技术领域的一种流水线物料投放用AGV及其使用方法,包括载物台,所述载物台的左侧下部设有透明玻璃罩和激光扫描器,且激光扫描器位于透明玻璃罩的内腔,所述透明玻璃罩的表面通过胶粘卡槽活动卡接有遮光板,所述载物台的底部左侧设有伺服转向电机和万向轮,系统结构简单,容易学会操作,同时利用移动终端可以实时监控AGV的运行状态,且蓄电池电压较低时可以通过报警器提醒,防止某一AGV突然失电,其余AGV发生碰撞,减小损坏的几率,延长使用寿命,实用性强,同时分别通过调节遮光板和透明玻璃罩的位置与高度,