
基于卡尔曼滤波的模糊PID故障确定容错控制方法.pdf

秀华****魔王

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于卡尔曼滤波的模糊PID故障确定容错控制方法.pdf
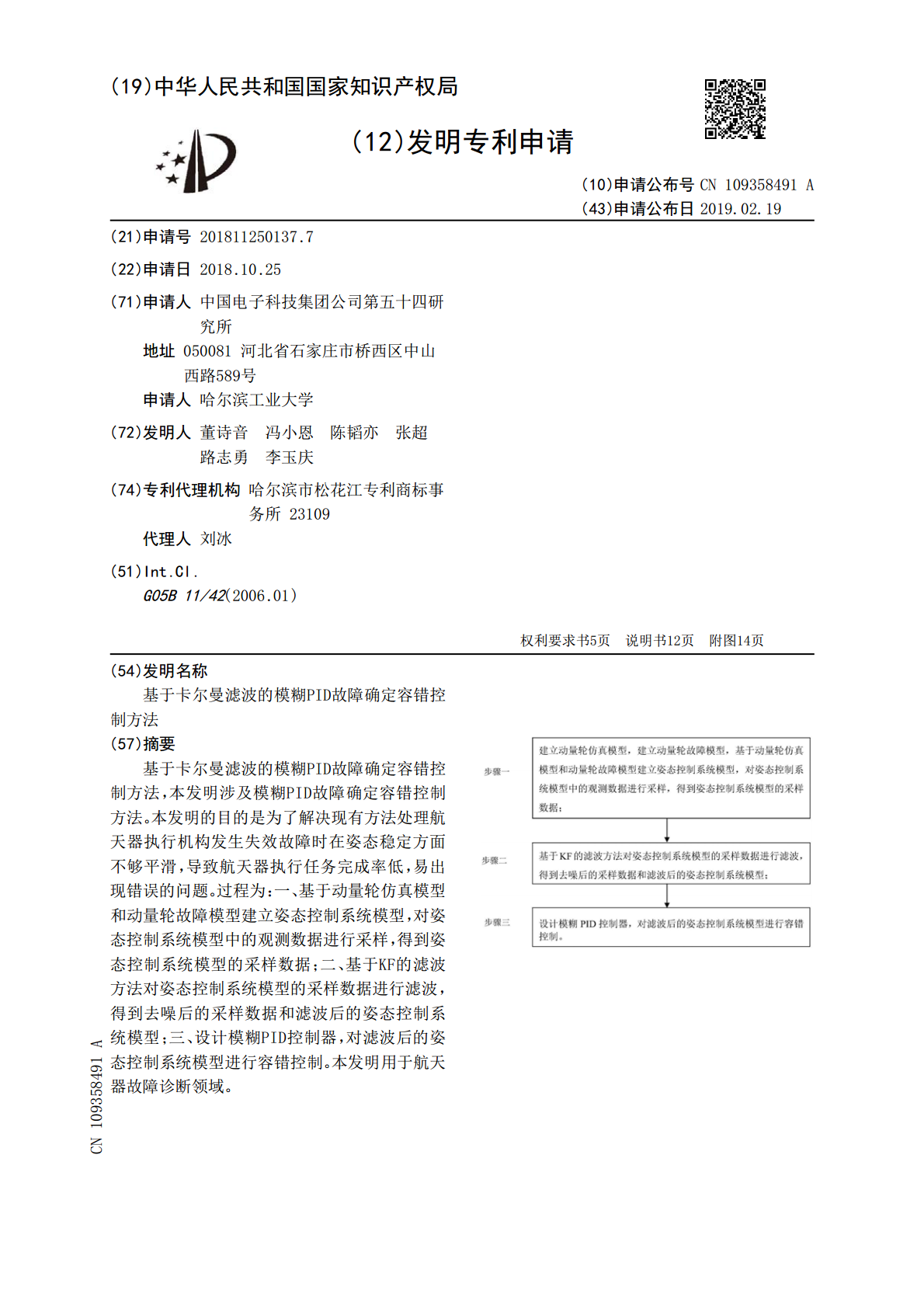
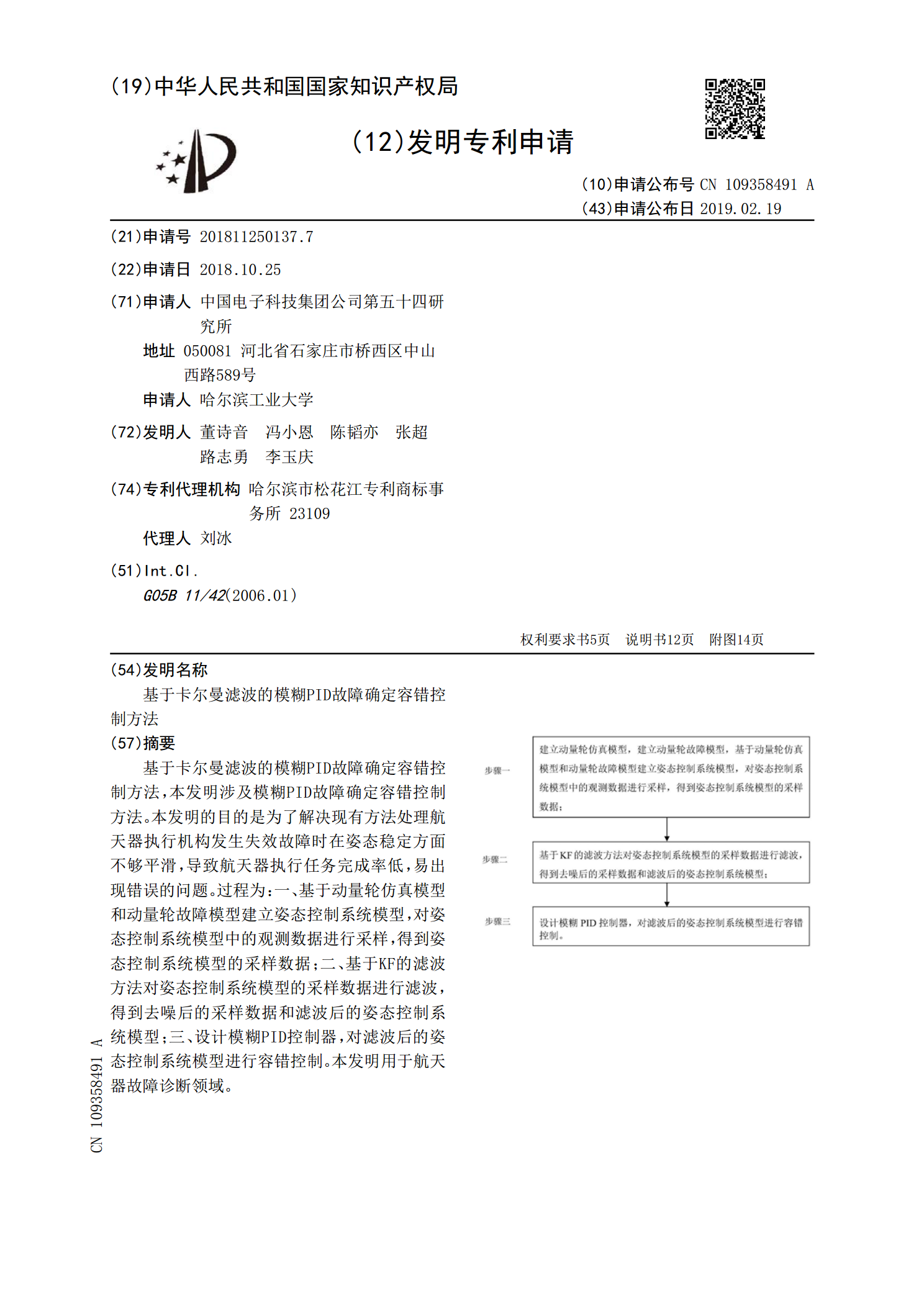
基于卡尔曼滤波的模糊PID故障确定容错控制方法,本发明涉及模糊PID故障确定容错控制方法。本发明的目的是为了解决现有方法处理航天器执行机构发生失效故障时在姿态稳定方面不够平滑,导致航天器执行任务完成率低,易出现错误的问题。过程为:一、基于动量轮仿真模型和动量轮故障模型建立姿态控制系统模型,对姿态控制系统模型中的观测数据进行采样,得到姿态控制系统模型的采样数据;二、基于KF的滤波方法对姿态控制系统模型的采样数据进行滤波,得到去噪后的采样数据和滤波后的姿态控制系统模型;三、设计模糊PID控制器,对滤波后的姿态
基于卡尔曼滤波改进的模糊PID控制纵向与横向混合磨削方法.pdf
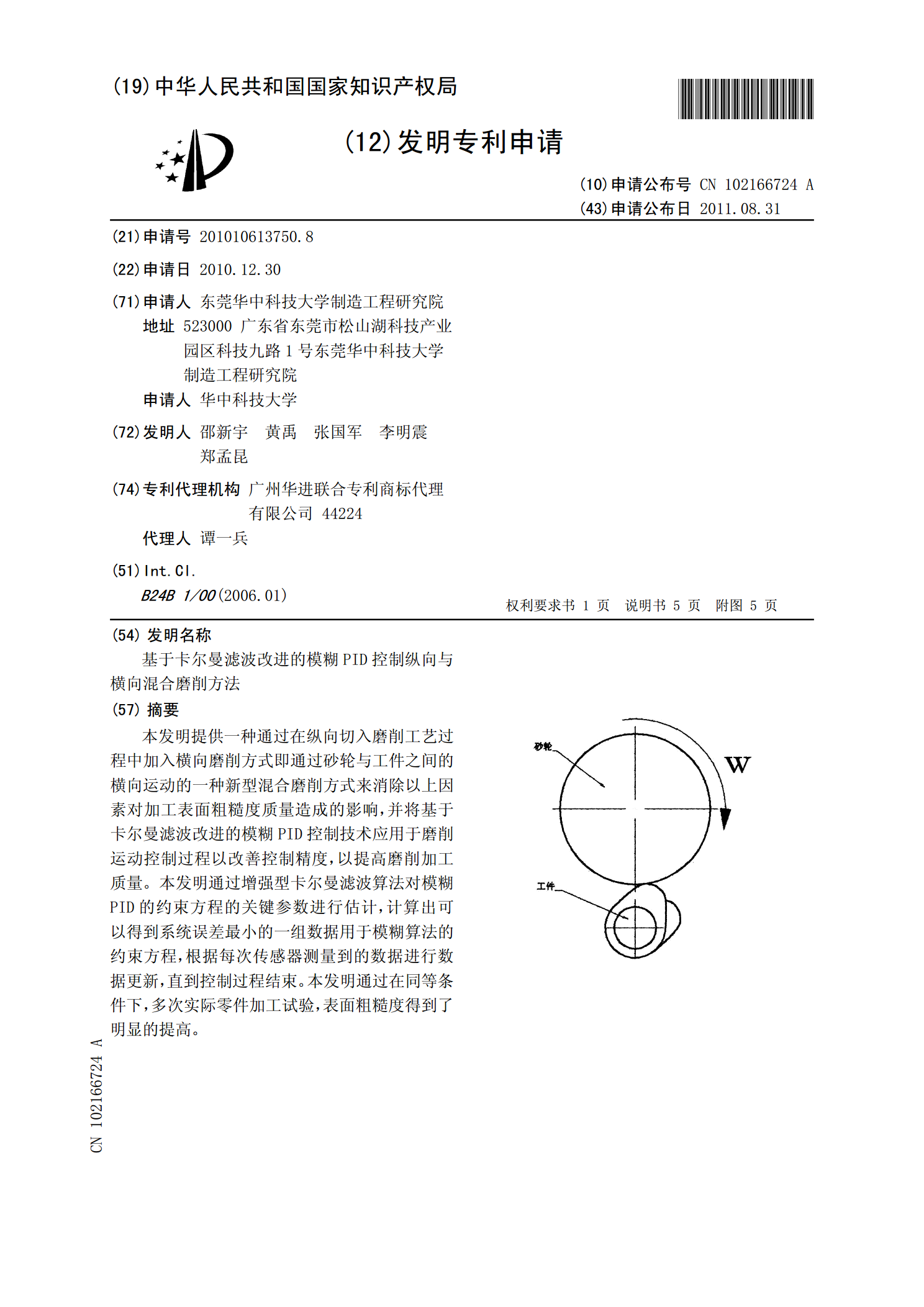
本发明提供一种通过在纵向切入磨削工艺过程中加入横向磨削方式即通过砂轮与工件之间的横向运动的一种新型混合磨削方式来消除以上因素对加工表面粗糙度质量造成的影响,并将基于卡尔曼滤波改进的模糊PID控制技术应用于磨削运动控制过程以改善控制精度,以提高磨削加工质量。本发明通过增强型卡尔曼滤波算法对模糊PID的约束方程的关键参数进行估计,计算出可以得到系统误差最小的一组数据用于模糊算法的约束方程,根据每次传感器测量到的数据进行数据更新,直到控制过程结束。本发明通过在同等条件下,多次实际零件加工试验,表面粗糙度得到了明

基于粒子群算法和卡尔曼滤波器的PID控制.docx
基于粒子群算法和卡尔曼滤波器的PID控制摘要:PID控制是工控领域常用的一种控制方式,粒子群算法和卡尔曼滤波器是现代控制领域中比较热门的算法。结合粒子群算法和卡尔曼滤波器对PID控制进行优化,可以得到更优秀的控制效果。本论文介绍了PID控制、粒子群算法和卡尔曼滤波器的原理及其优化方法,通过实验验证了基于粒子群算法和卡尔曼滤波器的PID控制对于控制系统的优化效果。关键词:PID控制,粒子群算法,卡尔曼滤波器,优化一、绪论PID控制是一种经典的控制方式,其原理简单易懂、工程应用广泛。PID控制器根据误差信号和

基于模糊卡尔曼滤波的锂电池SOC估算方法.docx
基于模糊卡尔曼滤波的锂电池SOC估算方法基于模糊卡尔曼滤波的锂电池SOC估算方法摘要:随着电动车辆的普及和锂电池技术的快速发展,对锂电池的状态进行准确的估算成为了电动车辆领域中的一个重要问题。电池的剩余能量水平(SOC)是电动车辆能源管理的关键因素之一,准确的SOC估算可以提高电动车辆的性能和安全性。本文提出了一种基于模糊卡尔曼滤波的锂电池SOC估算方法,在考虑锂电池非线性特性的基础上,通过引入模糊逻辑推理来改善SOC估算的准确性和稳定性。实验证明,该方法能够有效地提高锂电池SOC的估算精度和稳定性。关键

基于卡尔曼模糊自适应PID的激光雷达斩光频率控制方法.docx
基于卡尔曼模糊自适应PID的激光雷达斩光频率控制方法摘要:本篇论文研究了一种基于卡尔曼模糊自适应PID的激光雷达斩光频率控制方法。该方法结合了卡尔曼滤波、模糊控制和自适应PID控制的优点,能够有效控制激光雷达的斩光频率并提高测量精度。本文通过对该方法的原理、设计步骤和实验结果进行阐述,验证了该方法的有效性和可行性。最后,本文还对该方法的应用前景进行了展望和总结。关键词:激光雷达;斩光频率控制;卡尔曼滤波;模糊控制;自适应PID控制引言:激光雷达是一种无人车及机器人导航定位技术中非常重要的测量工具,其测量精