
智能餐厅服务机器人.pdf

猫巷****奕声


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能餐厅服务机器人.pdf
本发明公开一种智能餐厅服务机器人,包括模仿人形状的身体、头部、双手、裙子、行走底座。所述行走底座安装在裙子的下方,行走底座中设置有舵机转向机构和车轮电机驱动机构,所述双手向前伸出,双手上捧着餐盘,餐盘上盖设有盖子,餐盘与盖子之间设有开盖驱动机构。该机器人内置智能服务系统,系统构造包括中央控制器和信息采集电路、驱动电路、语音电路、显示电路;其能够实现迎宾、点菜、上菜、对话娱乐功能。

智能餐厅服务机器人的设计.pdf
·41·DOI:10.19551/j.cnki.issn1672-9129.2021.07.041智能餐厅服务机器人的设计门涛张明顺(北方民族大学电气工程及其自动化专业宁夏银川750021)基金项目:2020年北方民族大学区级创新训练计划项目---智能餐厅服务机器人,项目编号:S2020-11407-081摘要:本设计是关于一款智能餐厅服务机器人,采用AGV磁导航传感器对餐厅内铺设的磁带进行检测并精准定位顾客所在餐桌,按照顾客要求及老板的指令将所需物品送到指定位置,并且可以通过cc2541蓝牙模块实现顾客

智能餐厅服务系统机器人设计.pdf
一种智能餐厅服务机器人.pdf
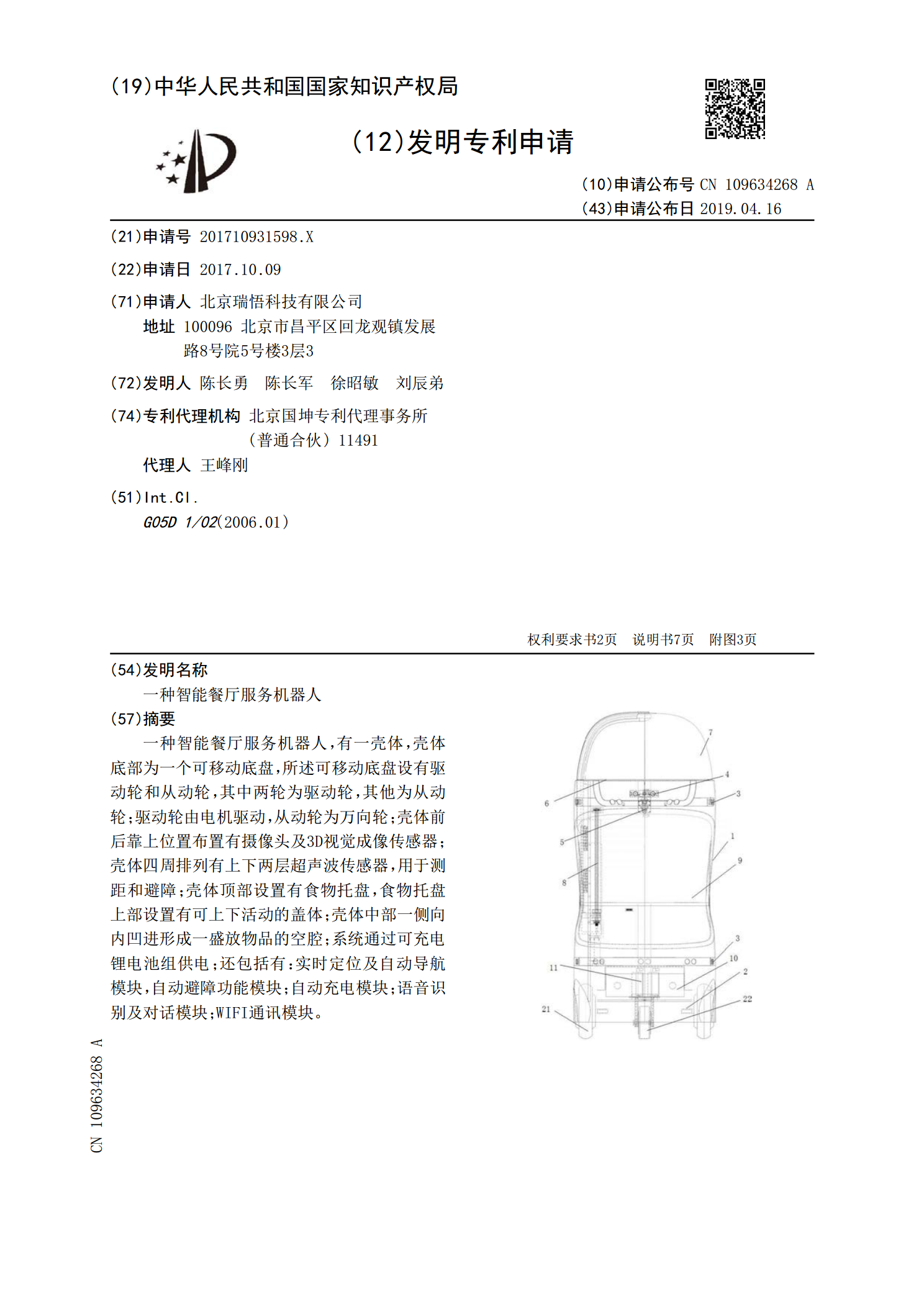
一种智能餐厅服务机器人,有一壳体,壳体底部为一个可移动底盘,所述可移动底盘设有驱动轮和从动轮,其中两轮为驱动轮,其他为从动轮;驱动轮由电机驱动,从动轮为万向轮;壳体前后靠上位置布置有摄像头及3D视觉成像传感器;壳体四周排列有上下两层超声波传感器,用于测距和避障;壳体顶部设置有食物托盘,食物托盘上部设置有可上下活动的盖体;壳体中部一侧向内凹进形成一盛放物品的空腔;系统通过可充电锂电池组供电;还包括有:实时定位及自动导航模块,自动避障功能模块;自动充电模块;语音识别及对话模块;WIFI通讯模块。
基于ROS的智能餐厅服务机器人的研究.pptx
添加副标题目录PART01PART02ROS的起源和功能ROS在机器人领域的应用ROS的架构和通信机制PART03智能餐厅服务机器人的定义和功能智能餐厅服务机器人的发展现状智能餐厅服务机器人的关键技术PART04机器人硬件平台的选择与搭建ROS系统的配置与移植机器人的感知系统设计机器人的控制系统设计机器人的执行系统设计PART05实验环境的搭建感知系统的实验与测试控制系统的实验与测试执行系统的实验与测试整体性能评估与优化PART06在智能餐厅中的应用前景在其他领域的应用前景面临的挑战与问题未来发展方向与趋