
电动载具及其控制方法.pdf

康平****ng

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电动载具、电动载具系统及其控制方法.pdf
本发明提供的一种电动载具,包括:主体、至少一个电动轮和控制器,该主体适于用户站立,该控制器根据用户的输入,向该电动轮发出驱动信号,该电动轮设置在该主体上,并适于根据该驱动信号转动,该主体适于在该电动轮的驱动下运动;该主体进一步包括前主体和后主体,该前主体和该后主体以可拆分的方式连接,该控制器设置在该前主体上,该前主体上设置有至少一个电动轮,该前主体适于在与该后主体分离的状态下,在设置于该前主体上的电动轮的驱动下独立的运动。本发明所提供的电动载具、电动载具系统及其控制方法,由于使用可拆分式主体,具有既能够实
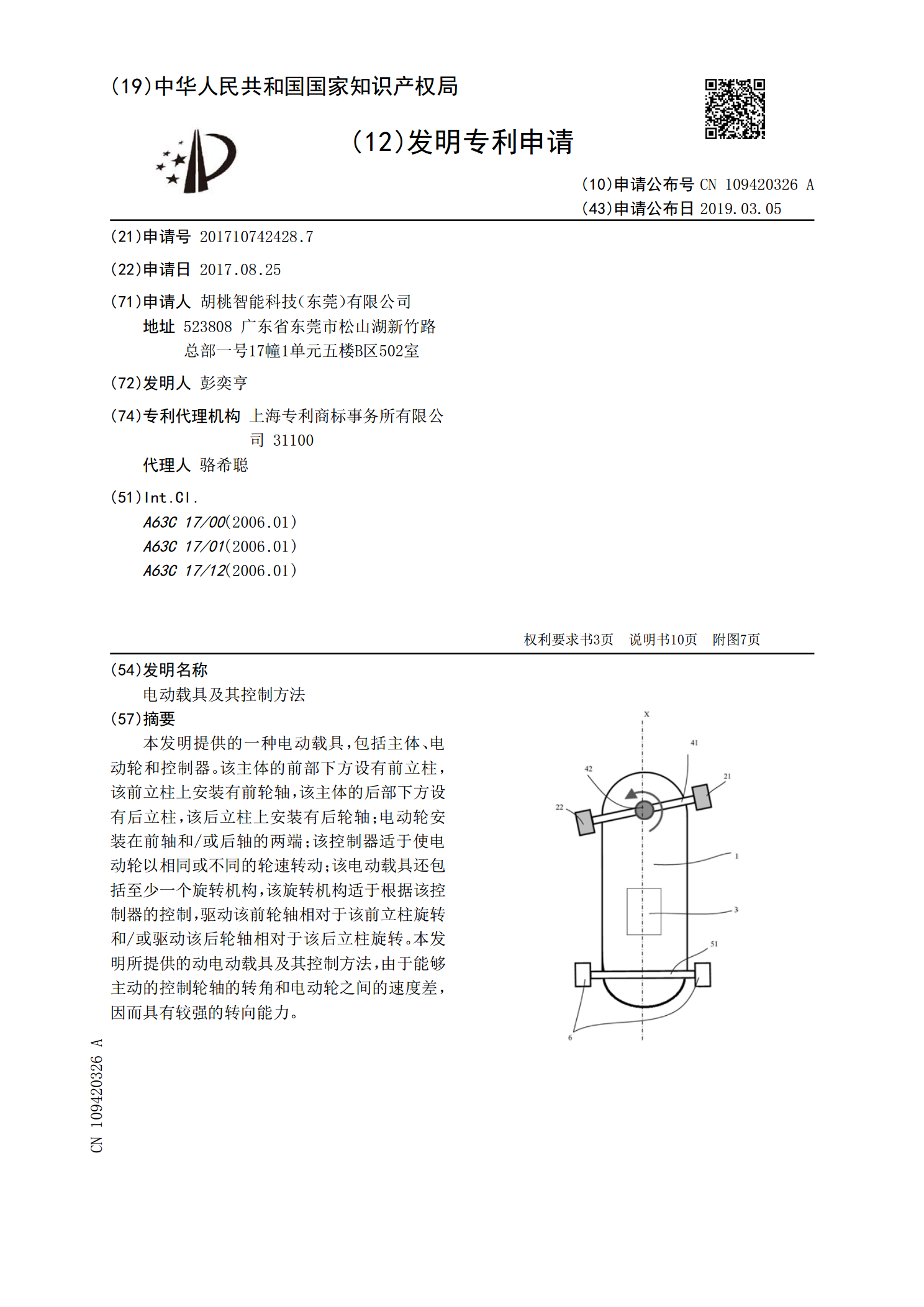
电动载具及其控制方法.pdf
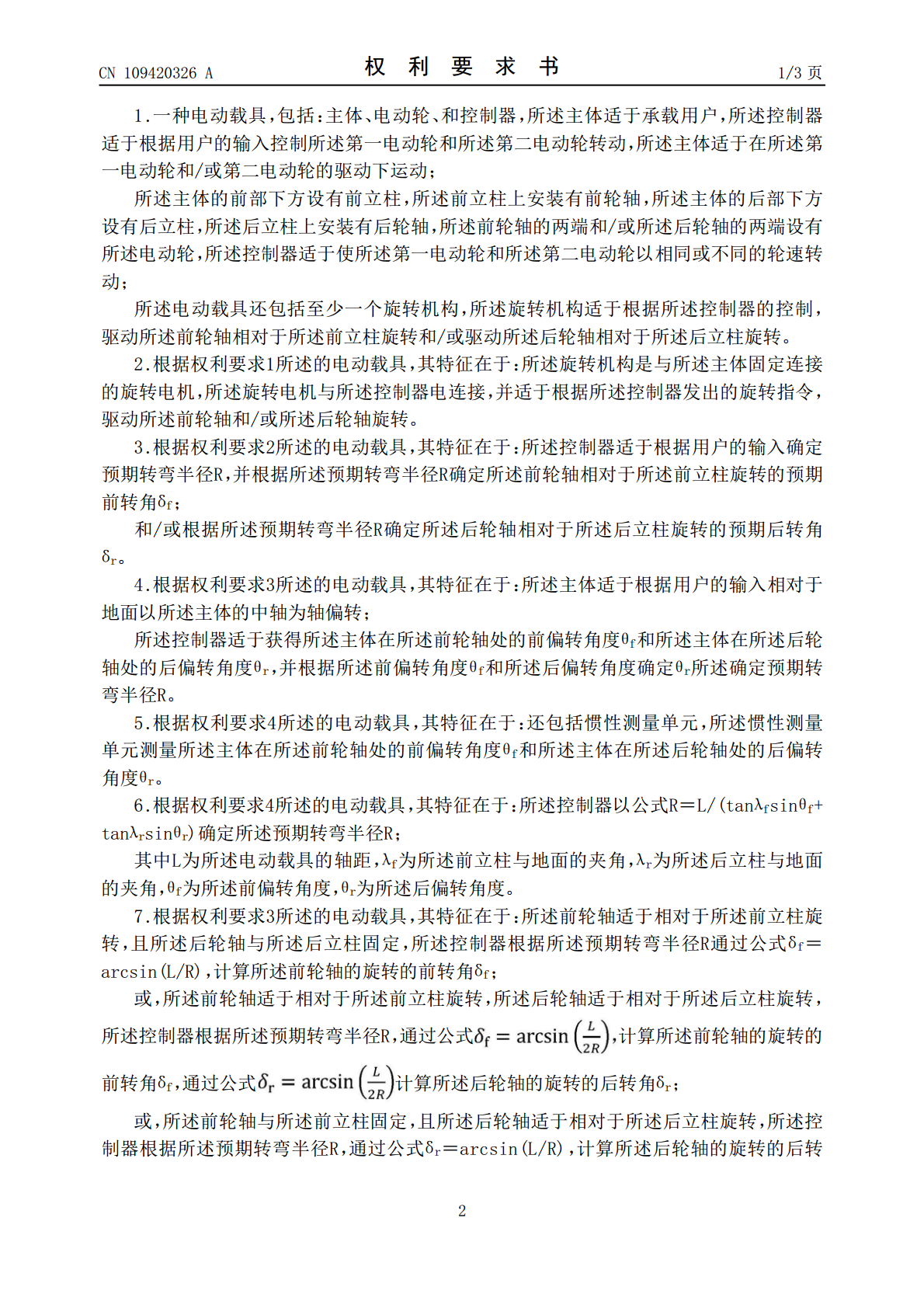
本发明提供的一种电动载具,包括主体、电动轮和控制器。该主体的前部下方设有前立柱,该前立柱上安装有前轮轴,该主体的后部下方设有后立柱,该后立柱上安装有后轮轴;电动轮安装在前轴和/或后轴的两端;该控制器适于使电动轮以相同或不同的轮速转动;该电动载具还包括至少一个旋转机构,该旋转机构适于根据该控制器的控制,驱动该前轮轴相对于该前立柱旋转和/或驱动该后轮轴相对于该后立柱旋转。本发明所提供的动电动载具及其控制方法,由于能够主动的控制轮轴的转角和电动轮之间的速度差,因而具有较强的转向能力。

电动载具系统及其控制方法.pdf
本发明提供一种电动载具系统,包括载具本体和遥控装置,该载具本体进一步包括承载体、压力感应模块、中央控制单元和运动部件;该压力感应模块设置在该承载体上,感应在该承载体的多个位置上的多个第一压力,产生第一信息;该遥控装置与该中央控制单元无线连接,该遥控装置接收用户输入,并根据该用户输入向该中央控制单元发出第二信息;该载具本体具有多个工作状态,该多个工作状态包括第一工作状态,在该第一工作状态下,该中央控制单元根据该第一信息和该第二信息,控制该载具本体运动。本发明提供的电动载具系统及其控制方法,由于在使用遥控装置

压控电动载具及其控制方法.pdf
本发明提供一种压控电动载具及其控制方法,本发明提供的压控电动载具包括主体、至少一个左侧电动轮和至少一个右侧电动轮。另外,本发明提供的压控电动载具还包括设置在该主体上的压力感应模块,在第一工作状态感应在该主体的多个位置上的多个第一压力,产生第一压力信息,且在第二工作状态感应在该主体的多个位置上的多个第二压力,产生第二压力信息。本发明提供的压控电动载具还包括中央控制单元,用于接收该第一压力信息,根据该第一压力信息产生参考压力分布,根据该第二压力信息和该参考压力分布确定第一目标速度,根据该第一目标速度向该至少一
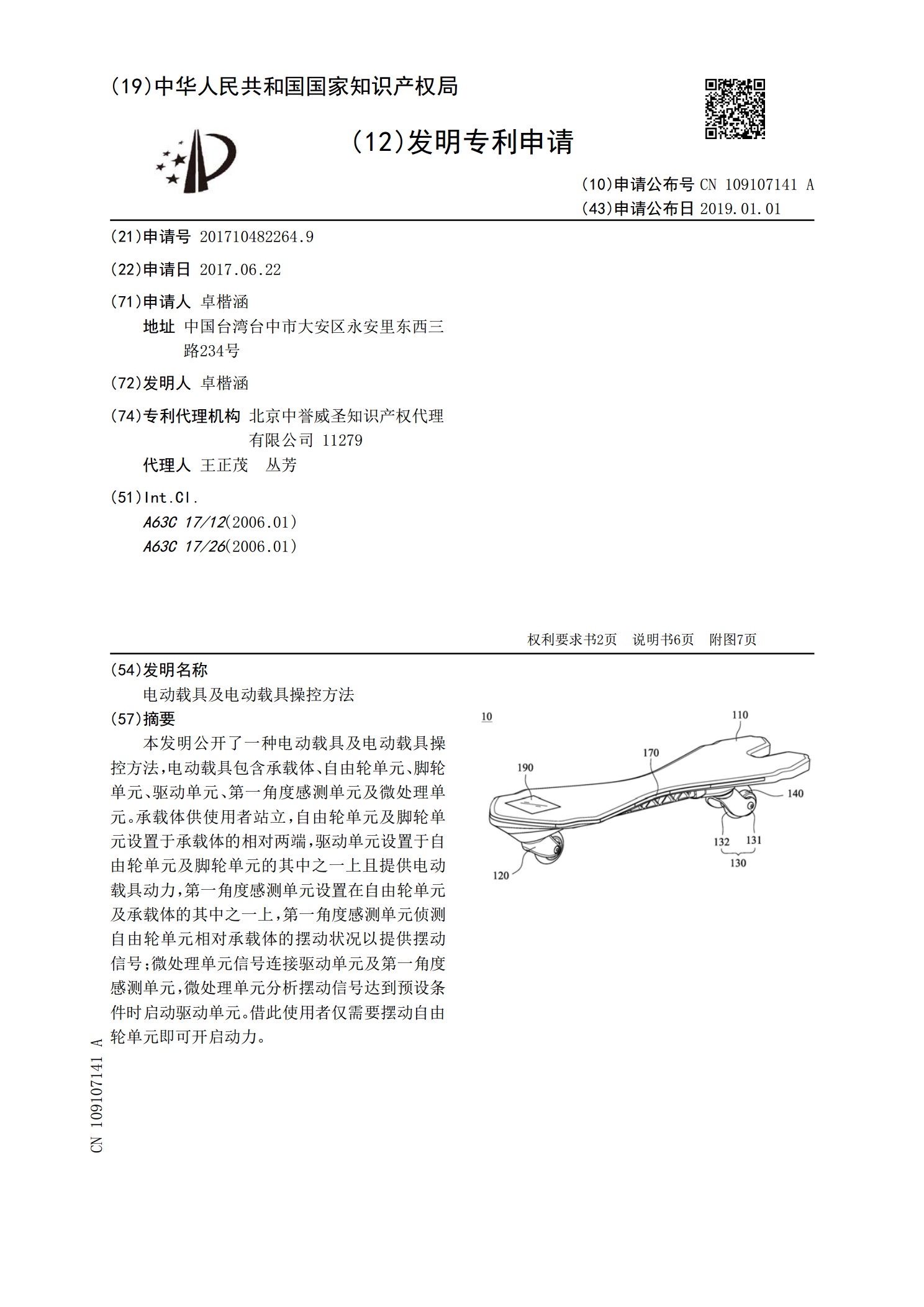
电动载具及电动载具操控方法.pdf
本发明公开了一种电动载具及电动载具操控方法,电动载具包含承载体、自由轮单元、脚轮单元、驱动单元、第一角度感测单元及微处理单元。承载体供使用者站立,自由轮单元及脚轮单元设置于承载体的相对两端,驱动单元设置于自由轮单元及脚轮单元的其中之一上且提供电动载具动力,第一角度感测单元设置在自由轮单元及承载体的其中之一上,第一角度感测单元侦测自由轮单元相对承载体的摆动状况以提供摆动信号;微处理单元信号连接驱动单元及第一角度感测单元,微处理单元分析摆动信号达到预设条件时启动驱动单元。借此使用者仅需要摆动自由轮单元即可开启