
道路平整度检测设备.pdf

努力****晓骞

1/8

2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
道路平整度检测设备.pdf
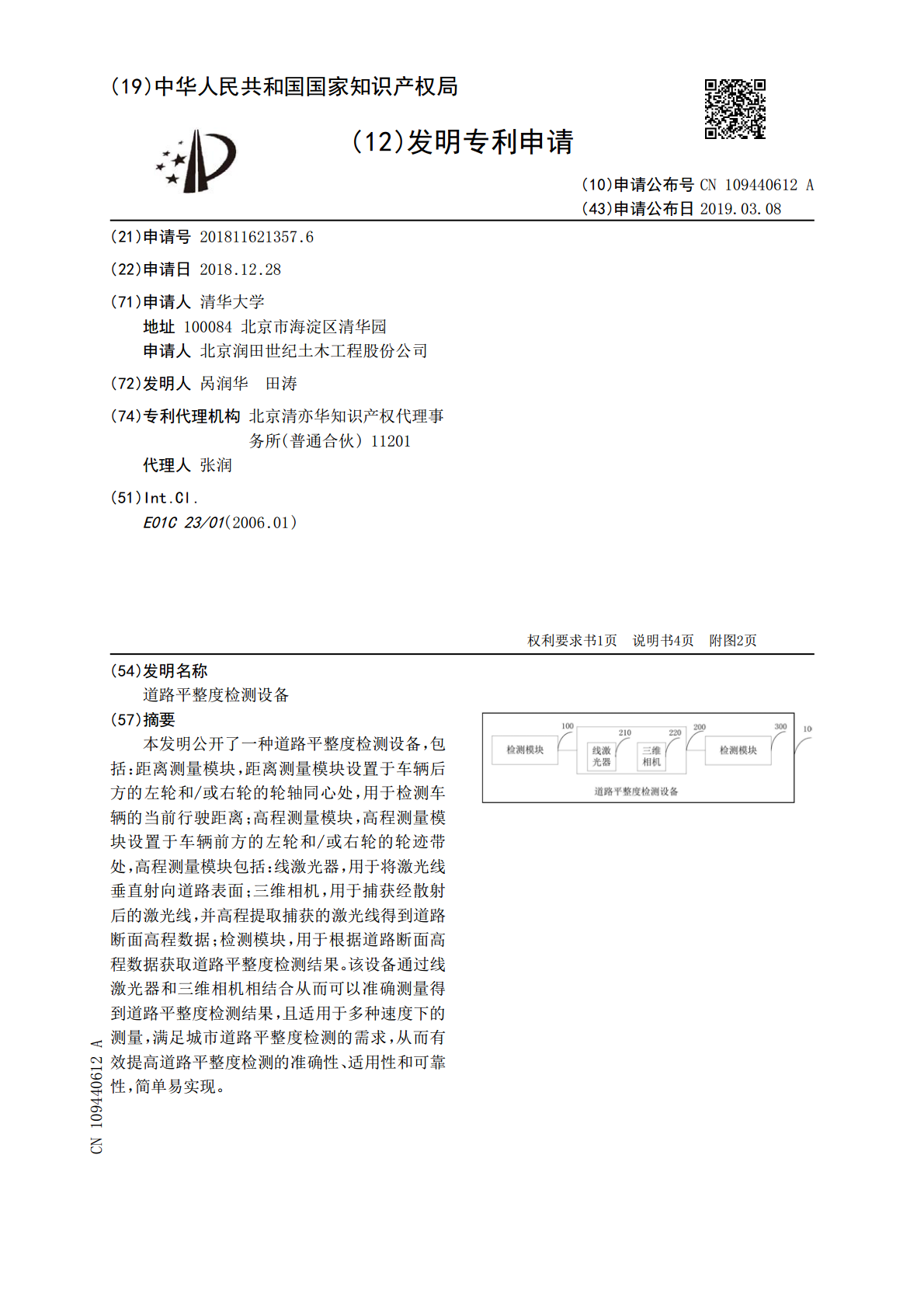
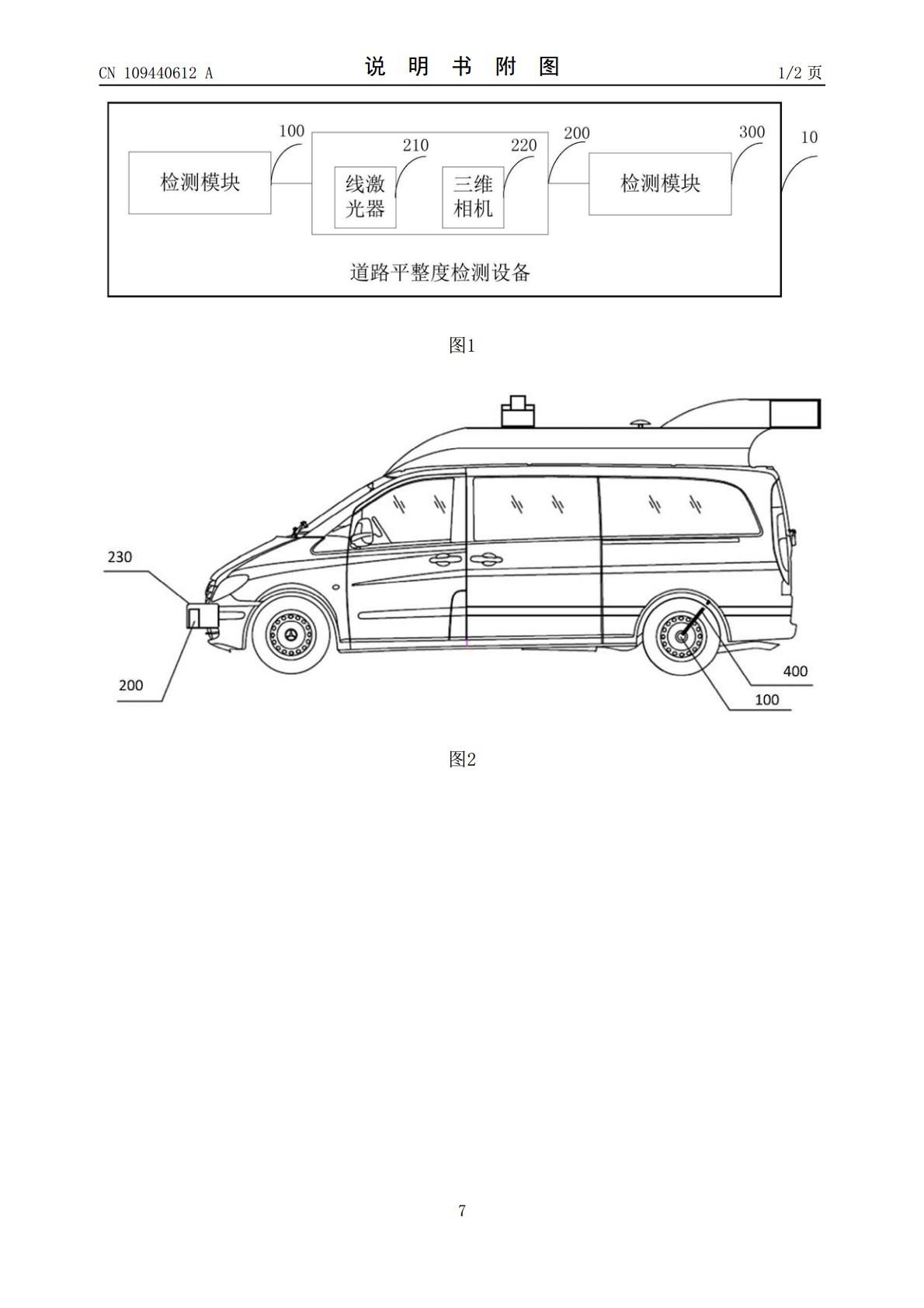
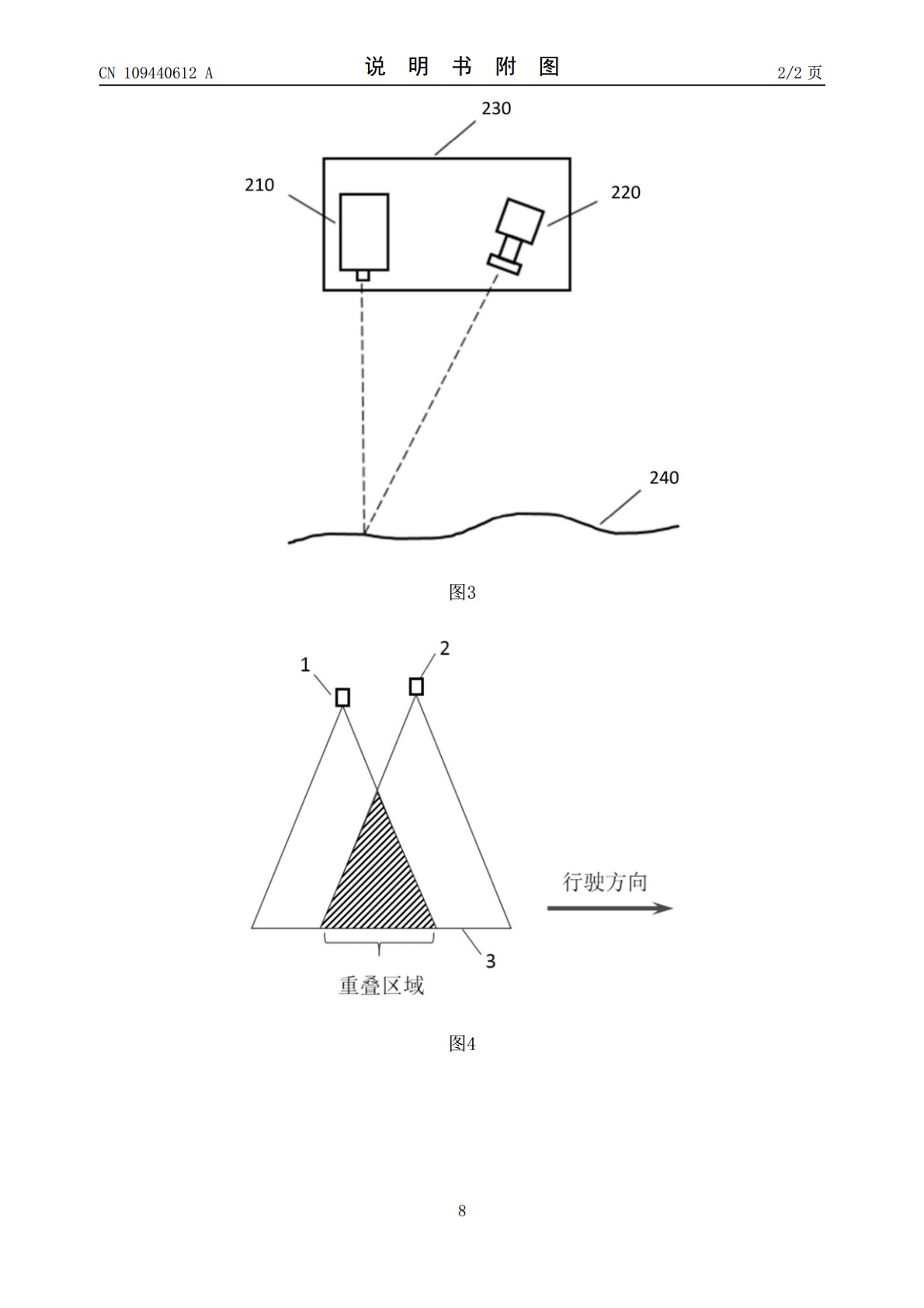
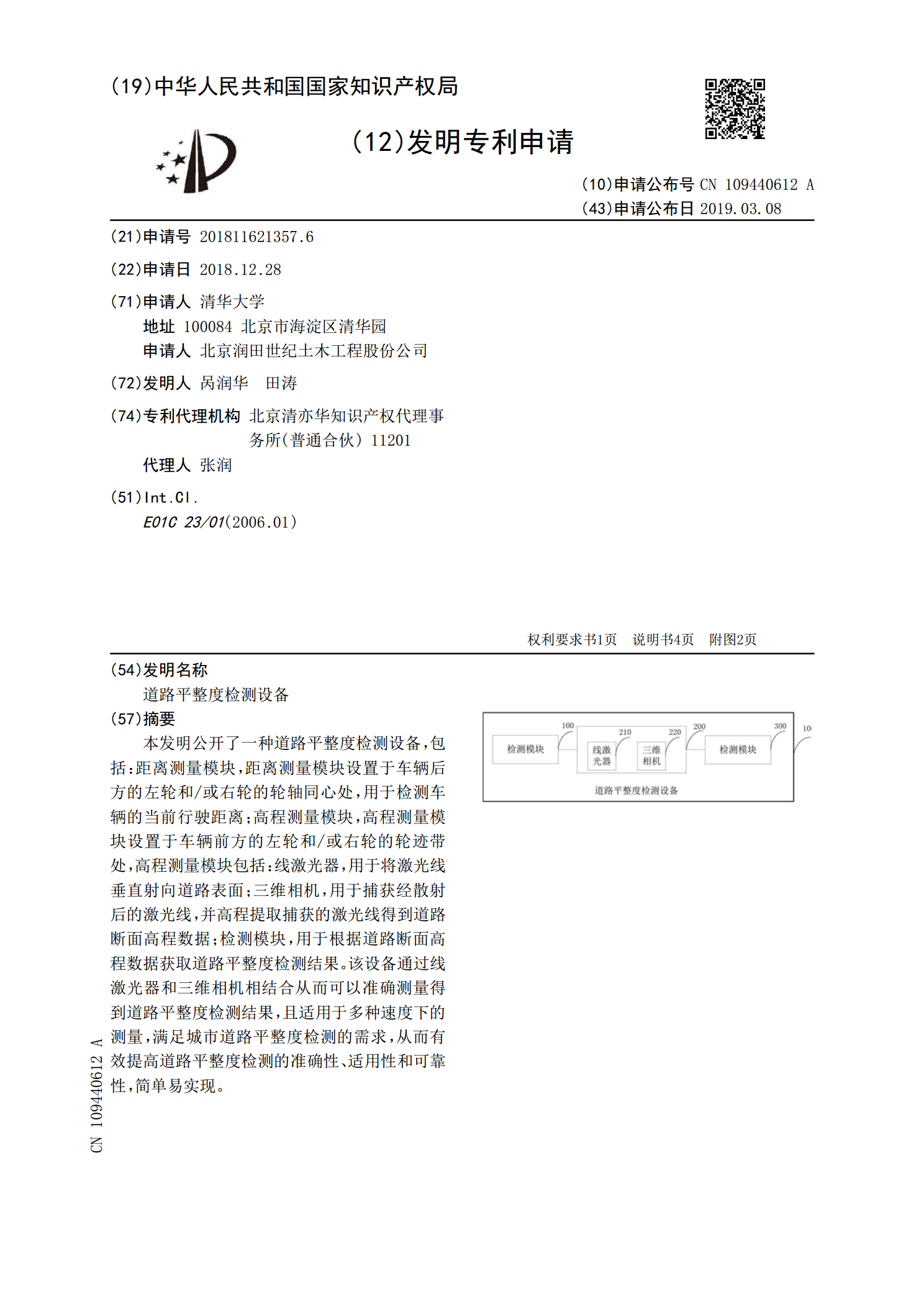
本发明公开了一种道路平整度检测设备,包括:距离测量模块,距离测量模块设置于车辆后方的左轮和/或右轮的轮轴同心处,用于检测车辆的当前行驶距离;高程测量模块,高程测量模块设置于车辆前方的左轮和/或右轮的轮迹带处,高程测量模块包括:线激光器,用于将激光线垂直射向道路表面;三维相机,用于捕获经散射后的激光线,并高程提取捕获的激光线得到道路断面高程数据;检测模块,用于根据道路断面高程数据获取道路平整度检测结果。该设备通过线激光器和三维相机相结合从而可以准确测量得到道路平整度检测结果,且适用于多种速度下的测量,满足城

道路平整度检测方法.pdf
本发明公开了一种道路平整度检测方法,属于道路检测领域。本发明包括信号收集步骤:通过光纤调解仪向光纤传递并接收光谱信号;坐标转化步骤:将光谱信号与光纤标号对应,并转化成光纤标号信号;信号分析步骤:将光纤标号信号与光纤坐标值对比分析,找出有差异点的形变坐标值;信号判断步骤:基于形变坐标值的情况,对形变坐标进行判断是否能连接成形变区域,若能则省略中间点保留边缘点,依次连接形成形成多边形的形变区域;若不能,则判断为形变点;图像显示步骤:将形变区域/形变点在初始光纤坐标系中实时显示。本发明通过将光纤铺设于道路内,实

一种道路平整度检测设备及其检测方法.pdf
本发明属于道路检测技术领域,尤其是涉及一种道路平整度检测设备及其检测方法。所述的正方形框架的四角连接有升降调节脚,且正方形框架的上端中间设置有圆形水平仪;所述的正方形框架的内部均匀设置有数个检测圆环,检测圆环的内部插接有平整度检测柱,平整度检测柱的外侧等距设置有数个感应环,且平整度检测柱的底部连接有接触滚轮,其中,它以平整度检测柱上端的感应环作为道路平整度的依据,并构建三维平面与水平面进行对比评估,它采用平面检测方法代替传统的3m尺检测方法,能够对路面平整度做出更加准确的评估,避免传统3m尺只能够进行直线
一种市政道路施工用平整度检测设备.pdf
本发明提供了一种市政道路施工用平整度检测设备,包括底座,所述底座的底部栓接有第一支撑板;通过采用所述底座的底部安装有第二支撑板,在经过第二支撑杆上面安装的联动轮和清理铲块,配合连接套筒内连接杆上安装座底部的清理毛刷,在拉动该装置进行移动时,不仅可以对路面上的灰尘进行清扫,而且可以对路面的泥土进行清铲,最大保障不会因外力造成路面不平,通过采用所述移动座内部的检测轮在不平的路面上移动时,可以上下移动带动配轮进行上下移动,从而带动固定杆在固定套筒内部上下移动,配合压块和压力传感器的使用,当压力传感器出现数值变化
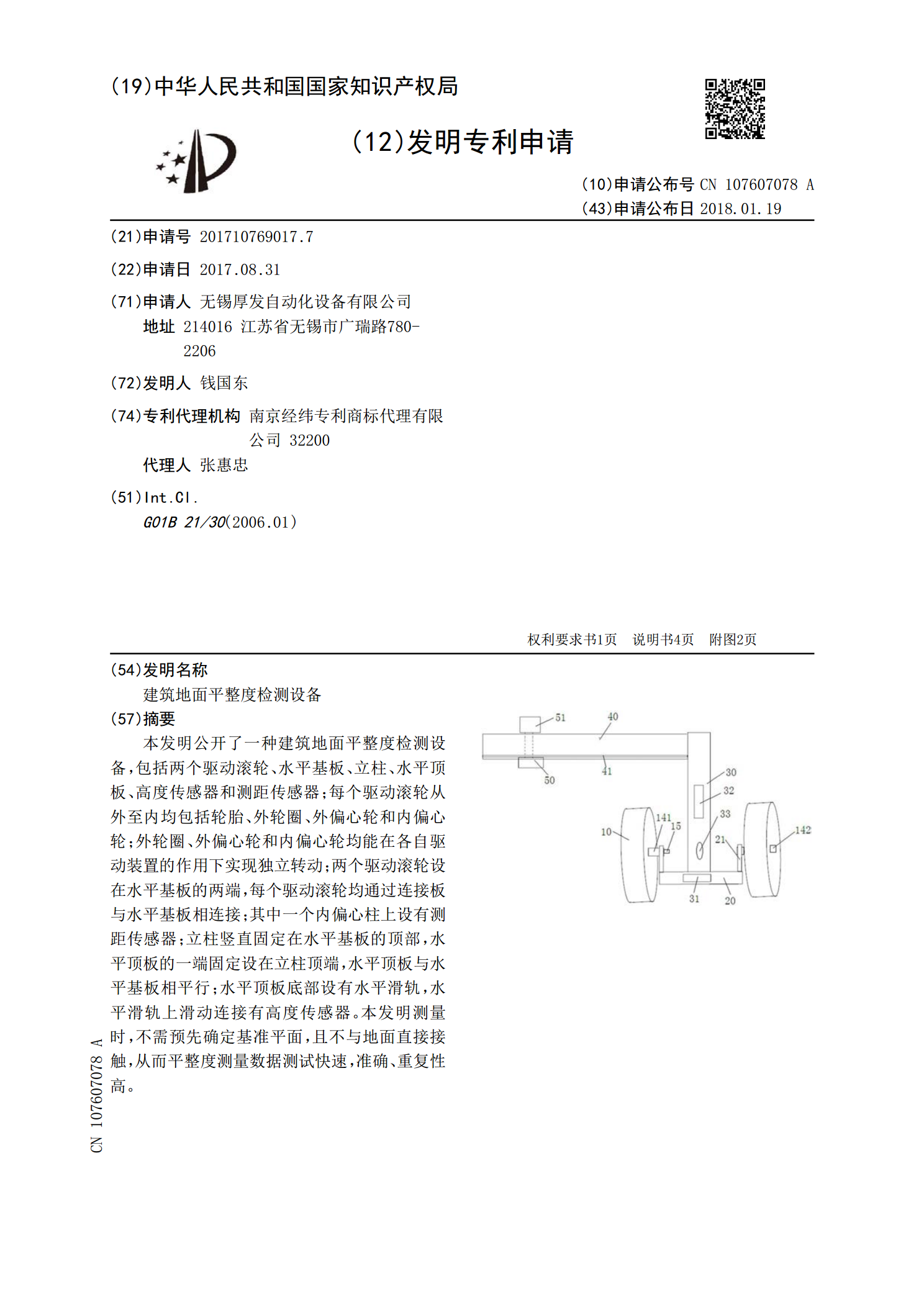
建筑地面平整度检测设备.pdf
本发明公开了一种建筑地面平整度检测设备,包括两个驱动滚轮、水平基板、立柱、水平顶板、高度传感器和测距传感器;每个驱动滚轮从外至内均包括轮胎、外轮圈、外偏心轮和内偏心轮;外轮圈、外偏心轮和内偏心轮均能在各自驱动装置的作用下实现独立转动;两个驱动滚轮设在水平基板的两端,每个驱动滚轮均通过连接板与水平基板相连接;其中一个内偏心柱上设有测距传感器;立柱竖直固定在水平基板的顶部,水平顶板的一端固定设在立柱顶端,水平顶板与水平基板相平行;水平顶板底部设有水平滑轨,水平滑轨上滑动连接有高度传感器。本发明测量时,不需预先