
一种螺旋锥齿轮副动态侧隙的计算方法.pdf

书生****专家

1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种螺旋锥齿轮副动态侧隙的计算方法.pdf
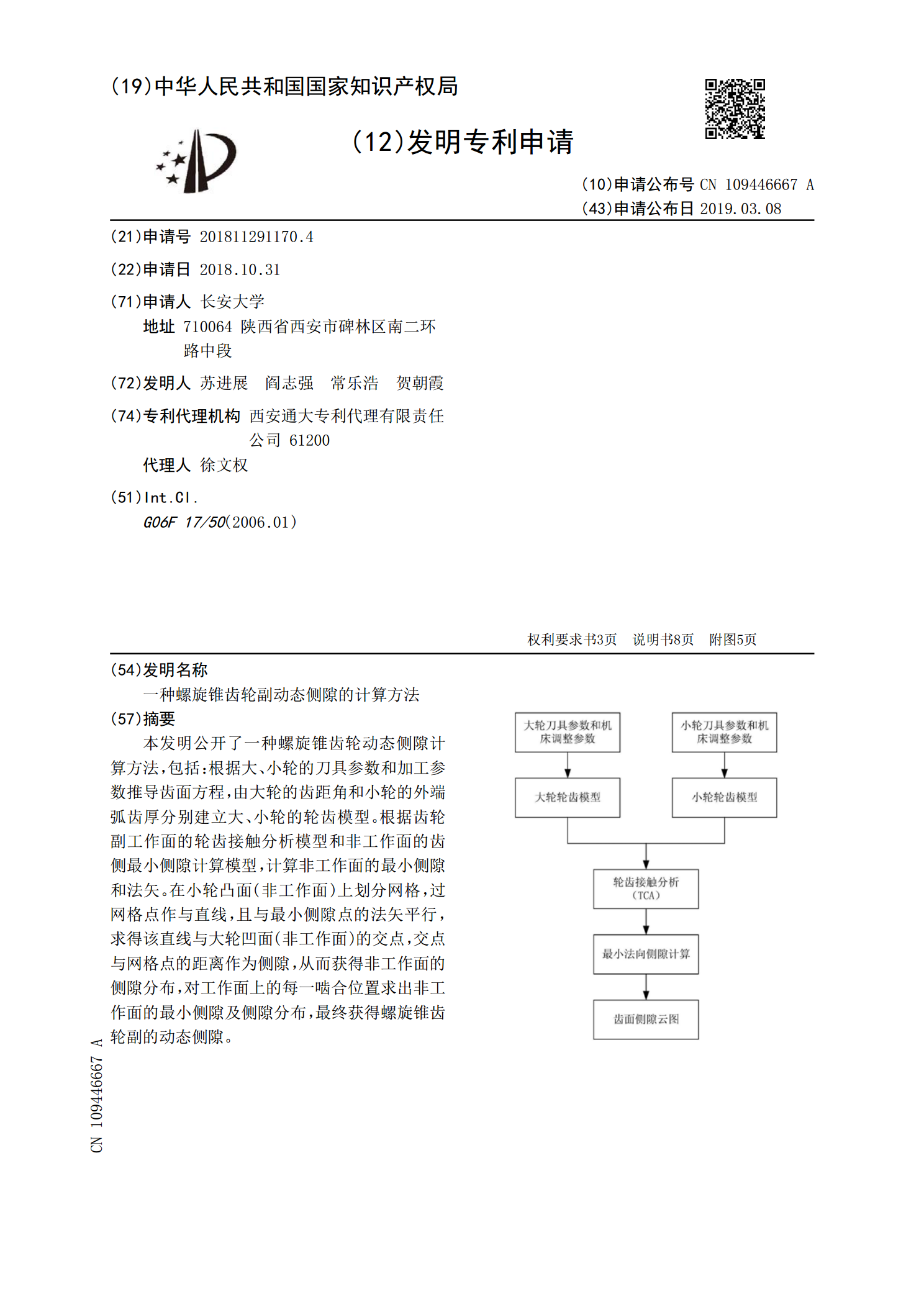
本发明公开了一种螺旋锥齿轮动态侧隙计算方法,包括:根据大、小轮的刀具参数和加工参数推导齿面方程,由大轮的齿距角和小轮的外端弧齿厚分别建立大、小轮的轮齿模型。根据齿轮副工作面的轮齿接触分析模型和非工作面的齿侧最小侧隙计算模型,计算非工作面的最小侧隙和法矢。在小轮凸面(非工作面)上划分网格,过网格点作与直线,且与最小侧隙点的法矢平行,求得该直线与大轮凹面(非工作面)的交点,交点与网格点的距离作为侧隙,从而获得非工作面的侧隙分布,对工作面上的每一啮合位置求出非工作面的最小侧隙及侧隙分布,最终获得螺旋锥齿轮副的动
锥齿轮副啮合侧隙的控制1.pdf
·2·綦传动2006年第2期锥齿轮副啮合侧隙的控制一一((ANSI/AGMA2005-B88锥齿轮设计手册》的学习应用赵世纯李灿摘要:锥齿轮副的啮合侧隙是锥齿轮设计、制造和安装的重要参数之一。如何确定、控制和检验锥齿轮副的侧隙并保证在安装时达到设计规定的侧隙要求,美国国家标准(ANSI/AGMA2005一B88锥齿轮设计手册》给锥齿轮设计制造和安装人员提供了相关资料。本文作者就标准的应用谈了一些自己的看法和体会关键词:侧隙最小法向许用侧隙法向侧隙圆周侧隙轴向侧隙侧隙变动量安装距修正量前言侧隙中有如下描述:

螺旋锥齿轮副啮合噪音计算方法.pdf
本发明涉及一种螺旋锥齿轮副啮合的噪音计算,其计算方法是将螺旋锥齿轮副的齿作为弹簧,齿轮本体做为质量的振动系;安装系统设为刚性的无振动,环境噪音不计算在内;以给定的载荷和噪音值选定参照点,根据整车设计要求确定噪音值、载荷、螺旋锥齿轮副的传动比、主动轮节圆线速度,计算相对滑动率、重合度:计算螺旋锥齿轮振动速度系数,螺旋锥齿轮副振动的振幅,换算螺旋角,计算螺旋锥齿轮副啮合的噪音,结果分析。本发明计算方法简单、计算时间短、误差小准确性高;通过计算分析,优化了螺旋锥齿轮副的结构参数,为合理选取制造工艺和制造精度、降
一种用于检测螺旋锥齿轮研齿侧隙的补偿方法.pdf
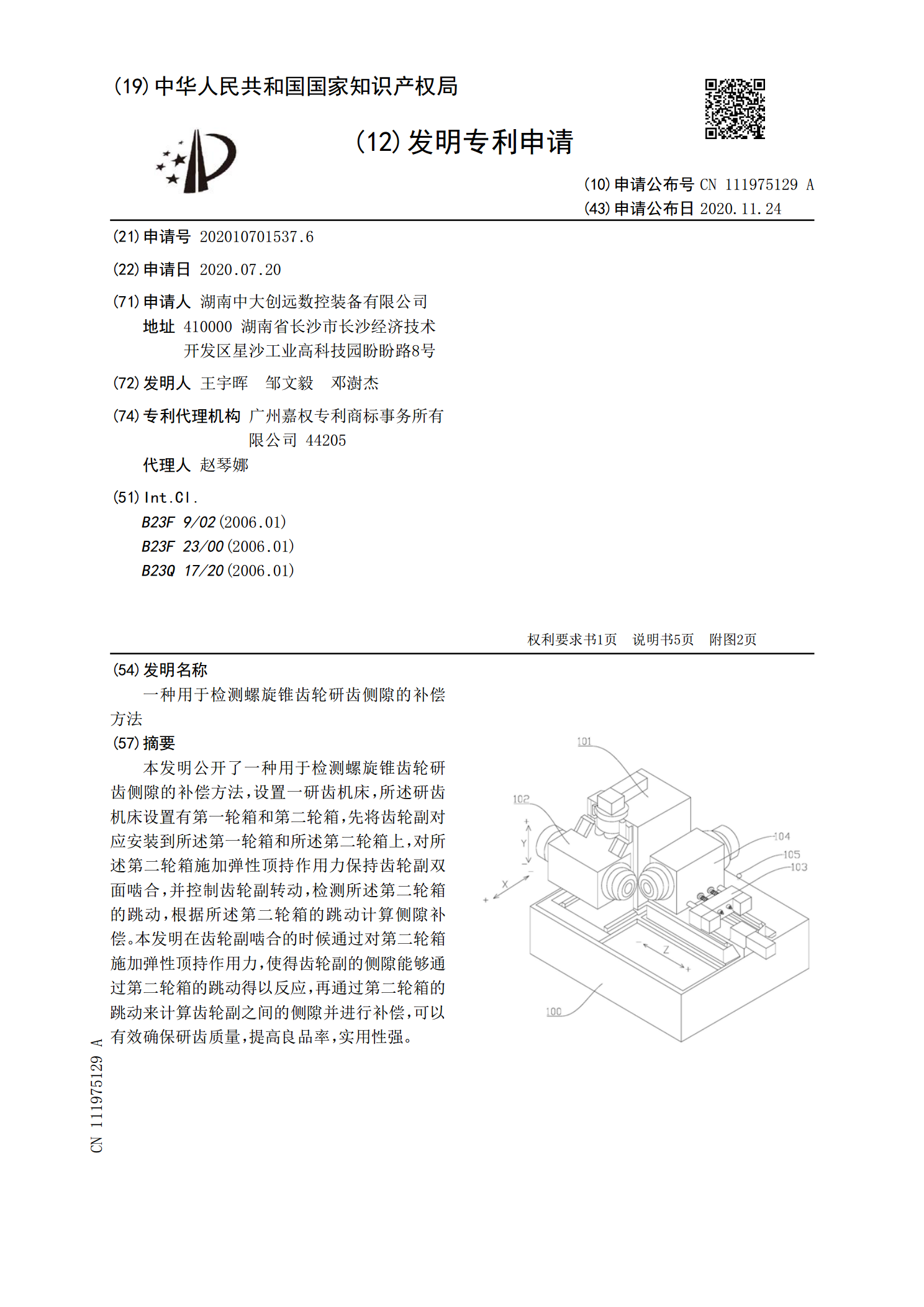
本发明公开了一种用于检测螺旋锥齿轮研齿侧隙的补偿方法,设置一研齿机床,所述研齿机床设置有第一轮箱和第二轮箱,先将齿轮副对应安装到所述第一轮箱和所述第二轮箱上,对所述第二轮箱施加弹性顶持作用力保持齿轮副双面啮合,并控制齿轮副转动,检测所述第二轮箱的跳动,根据所述第二轮箱的跳动计算侧隙补偿。本发明在齿轮副啮合的时候通过对第二轮箱施加弹性顶持作用力,使得齿轮副的侧隙能够通过第二轮箱的跳动得以反应,再通过第二轮箱的跳动来计算齿轮副之间的侧隙并进行补偿,可以有效确保研齿质量,提高良品率,实用性强。

齿轮副侧隙探讨.docx
齿轮副侧隙探讨标题:齿轮副侧隙探讨摘要:齿轮副作为一种常见的传动装置,在机械工程领域中得到广泛应用。侧隙是齿轮副运行中重要的力学特性之一,直接影响着摩擦、噪声和传动效率等方面。本论文对齿轮副侧隙的影响因素进行了探讨,并针对侧隙对传动性能的影响进行了分析和研究。通过本文的研究可以更好地了解齿轮副侧隙对传动性能的影响,为齿轮副的设计和优化提供理论依据。关键词:齿轮副,侧隙,摩擦,噪声,传动效率一、引言齿轮副作为一种常见的传动装置,广泛应用于各个工业领域。侧隙是齿轮副运行中不可避免的现象,其大小和位置对齿轮副的