
一种双棘轮双封装机构.pdf

俊英****22


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双棘轮双封装机构.pdf
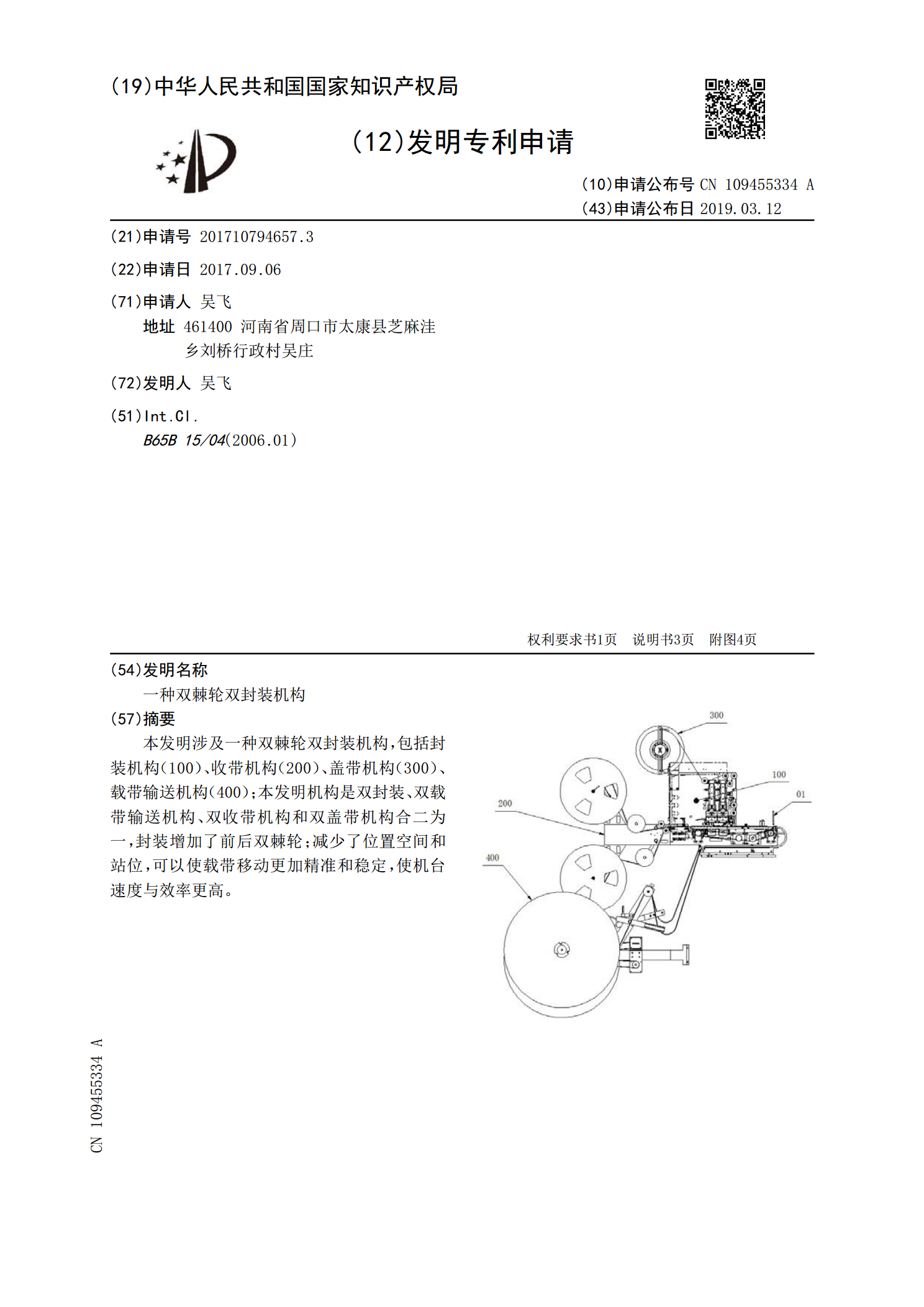
本发明涉及一种双棘轮双封装机构,包括封装机构(100)、收带机构(200)、盖带机构(300)、载带输送机构(400);本发明机构是双封装、双载带输送机构、双收带机构和双盖带机构合二为一,封装增加了前后双棘轮;减少了位置空间和站位,可以使载带移动更加精准和稳定,使机台速度与效率更高。

一种双头棘轮扳手.pdf
本发明属于紧固件技术领域,涉及一种双头棘轮扳手。其特征在于:所说的棘轮是一个双头棘轮(2),还包括第2棘爪组件,第2棘爪组件由第2棘爪(7)、第2弹簧(8)和第2弹簧座(9)组成。本发明提出了一种双头棘轮扳手,能有效地防止在螺母松动的情况下出现打滑现象,便于在手无法伸入的狭小空间内,方便对螺母进行拆装。
含有棘轮机构的双进程螺栓结构.pdf
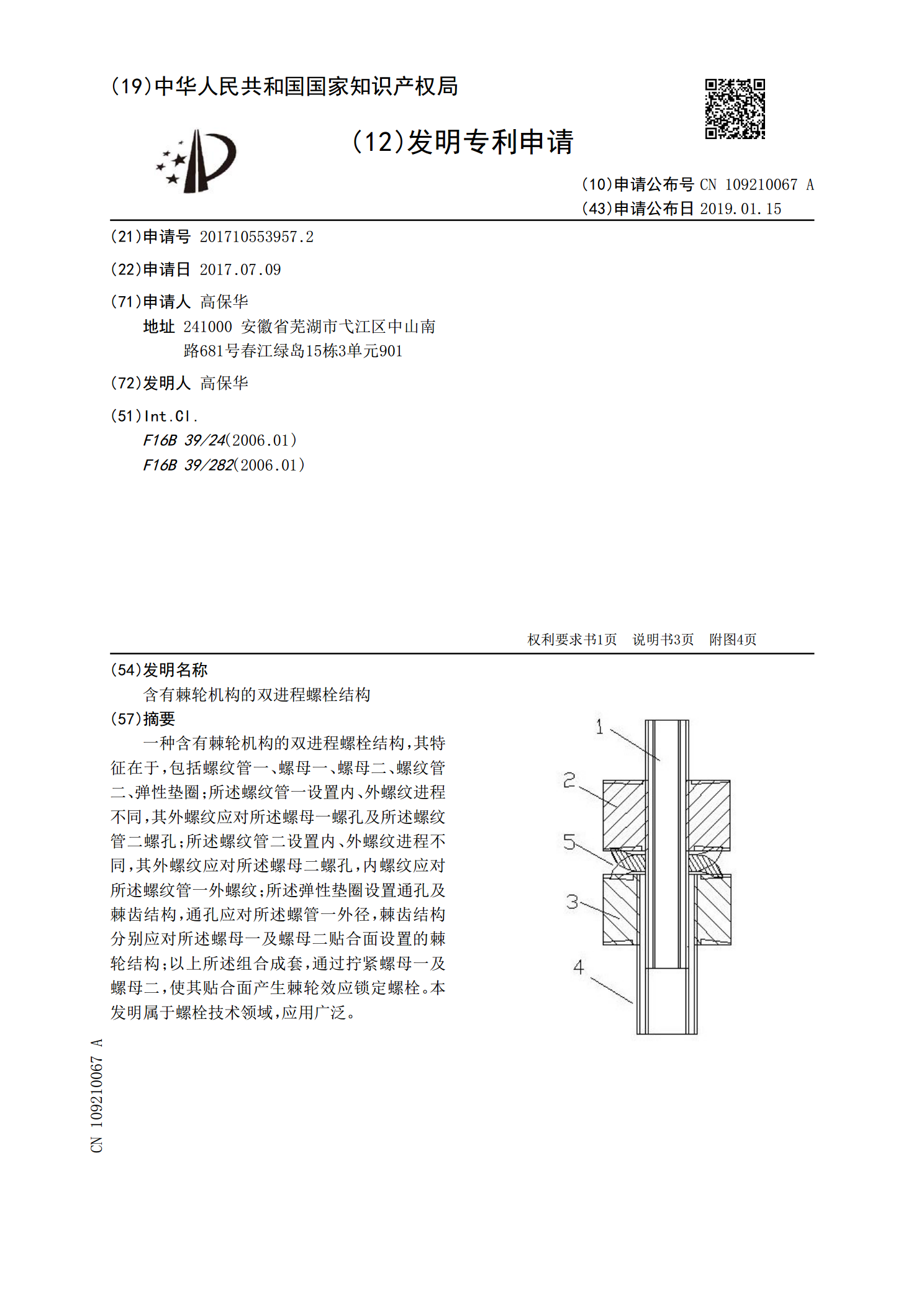
一种含有棘轮机构的双进程螺栓结构,其特征在于,包括螺纹管一、螺母一、螺母二、螺纹管二、弹性垫圈;所述螺纹管一设置内、外螺纹进程不同,其外螺纹应对所述螺母一螺孔及所述螺纹管二螺孔;所述螺纹管二设置内、外螺纹进程不同,其外螺纹应对所述螺母二螺孔,内螺纹应对所述螺纹管一外螺纹;所述弹性垫圈设置通孔及棘齿结构,通孔应对所述螺管一外径,棘齿结构分别应对所述螺母一及螺母二贴合面设置的棘轮结构;以上所述组合成套,通过拧紧螺母一及螺母二,使其贴合面产生棘轮效应锁定螺栓。本发明属于螺栓技术领域,应用广泛。
滚动式双棘轮道路能量收集机构.pdf
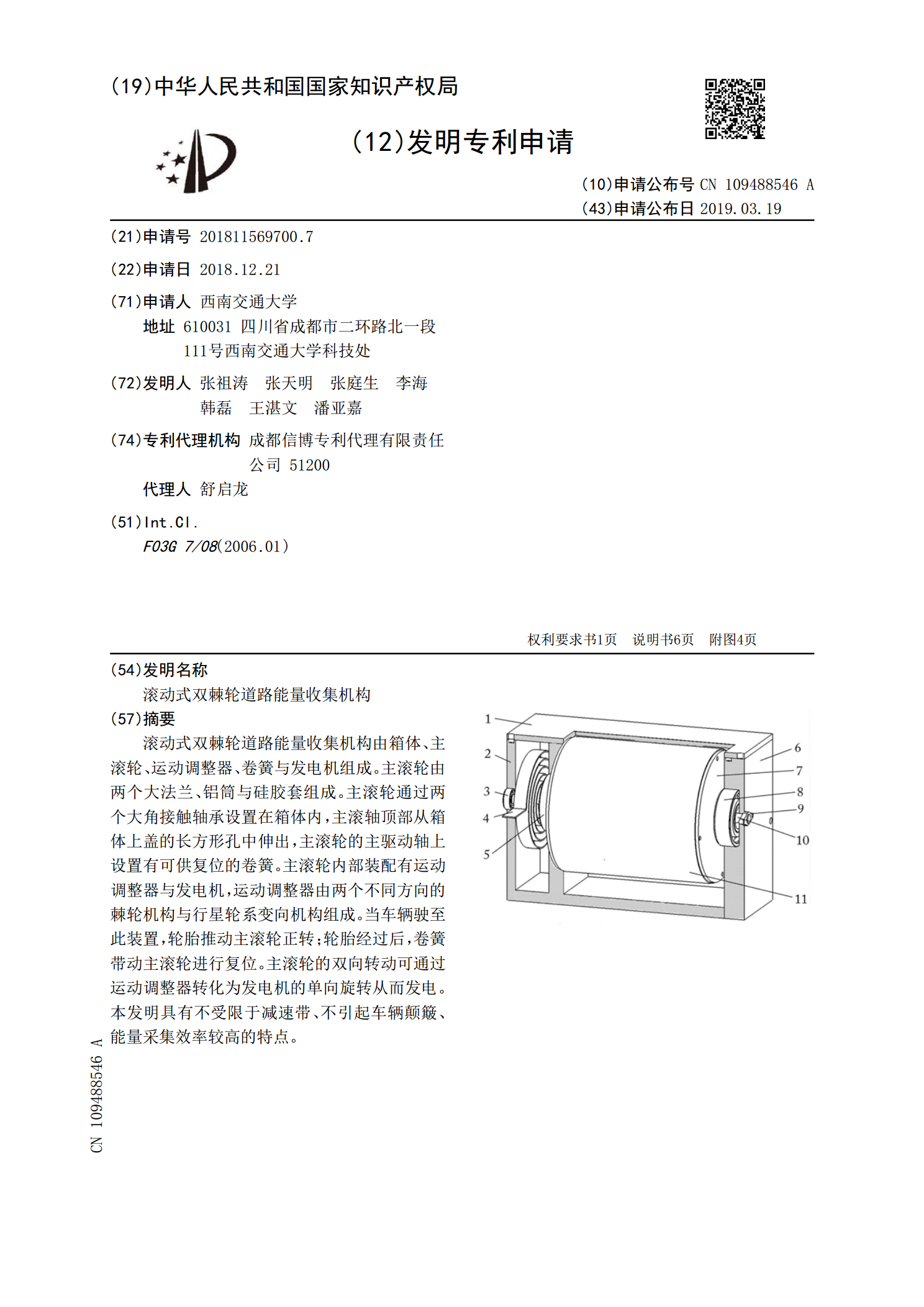
滚动式双棘轮道路能量收集机构由箱体、主滚轮、运动调整器、卷簧与发电机组成。主滚轮由两个大法兰、铝筒与硅胶套组成。主滚轮通过两个大角接触轴承设置在箱体内,主滚轴顶部从箱体上盖的长方形孔中伸出,主滚轮的主驱动轴上设置有可供复位的卷簧。主滚轮内部装配有运动调整器与发电机,运动调整器由两个不同方向的棘轮机构与行星轮系变向机构组成。当车辆驶至此装置,轮胎推动主滚轮正转;轮胎经过后,卷簧带动主滚轮进行复位。主滚轮的双向转动可通过运动调整器转化为发电机的单向旋转从而发电。本发明具有不受限于减速带、不引起车辆颠簸、能量采
一种双棘轮送料装置.pdf
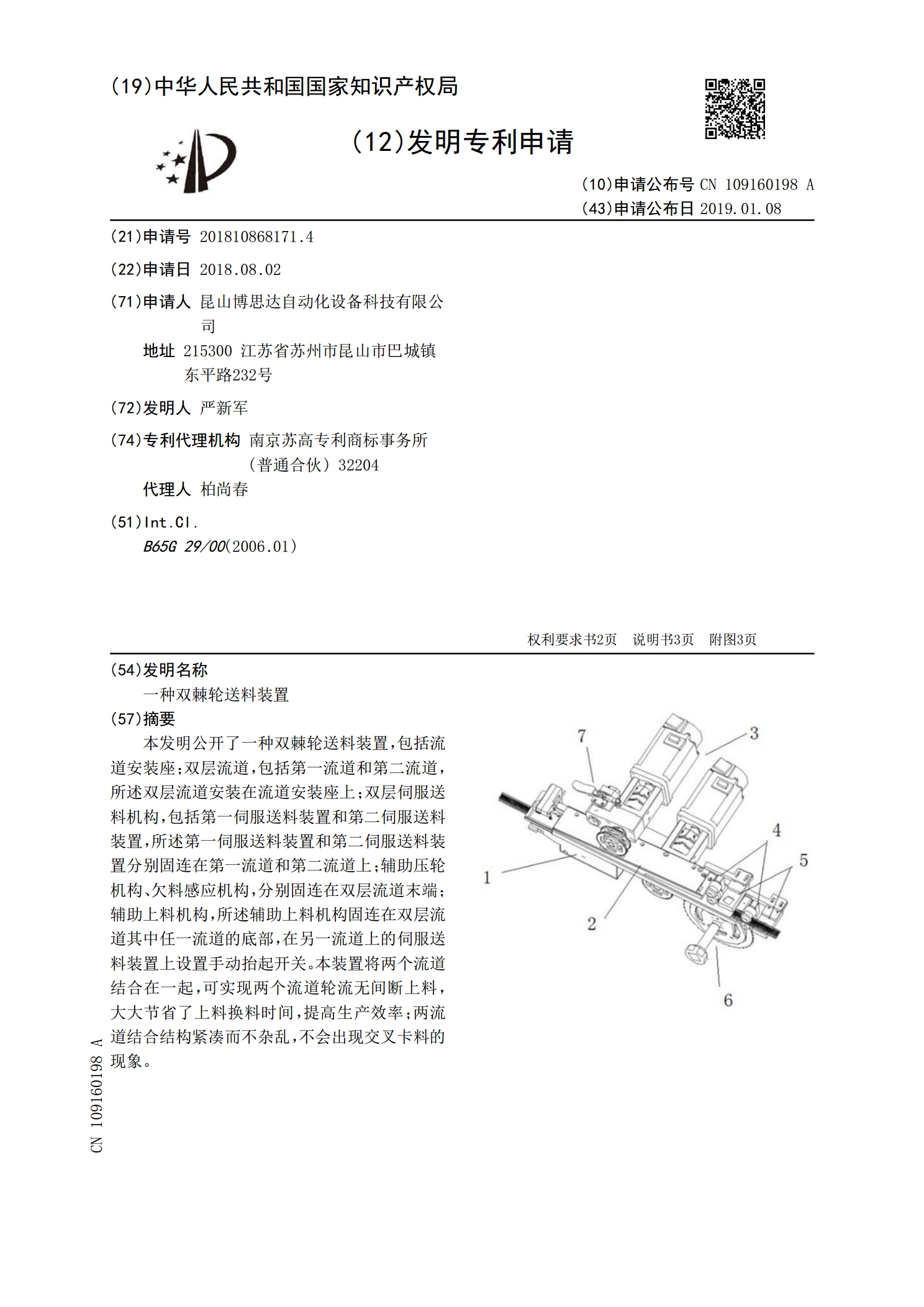
本发明公开了一种双棘轮送料装置,包括流道安装座;双层流道,包括第一流道和第二流道,所述双层流道安装在流道安装座上;双层伺服送料机构,包括第一伺服送料装置和第二伺服送料装置,所述第一伺服送料装置和第二伺服送料装置分别固连在第一流道和第二流道上;辅助压轮机构、欠料感应机构,分别固连在双层流道末端;辅助上料机构,所述辅助上料机构固连在双层流道其中任一流道的底部,在另一流道上的伺服送料装置上设置手动抬起开关。本装置将两个流道结合在一起,可实现两个流道轮流无间断上料,大大节省了上料换料时间,提高生产效率;两流道结合