
一种具有分辨方向可进行AI交互的机器人.pdf

如灵****姐姐

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有分辨方向可进行AI交互的机器人.pdf
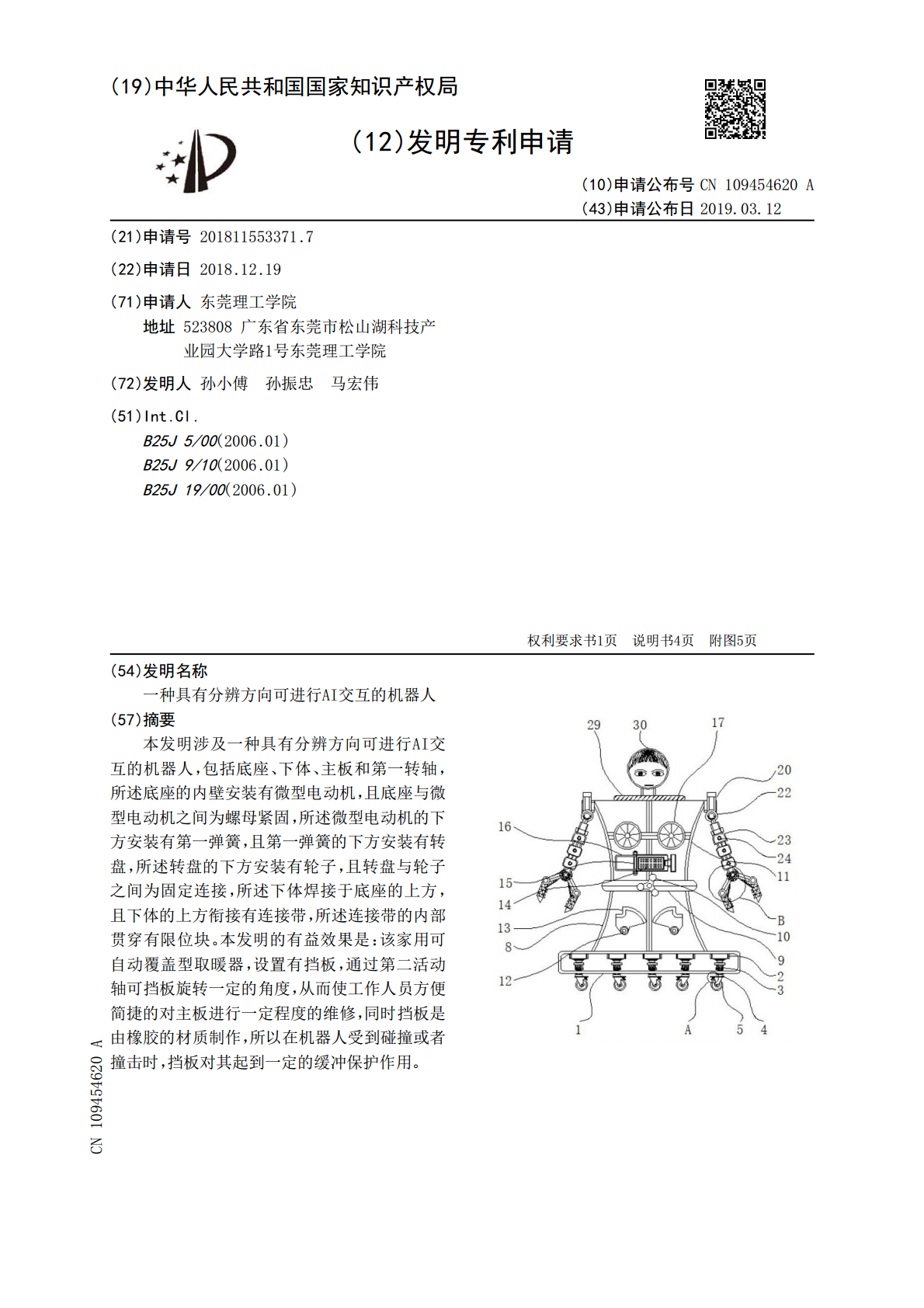
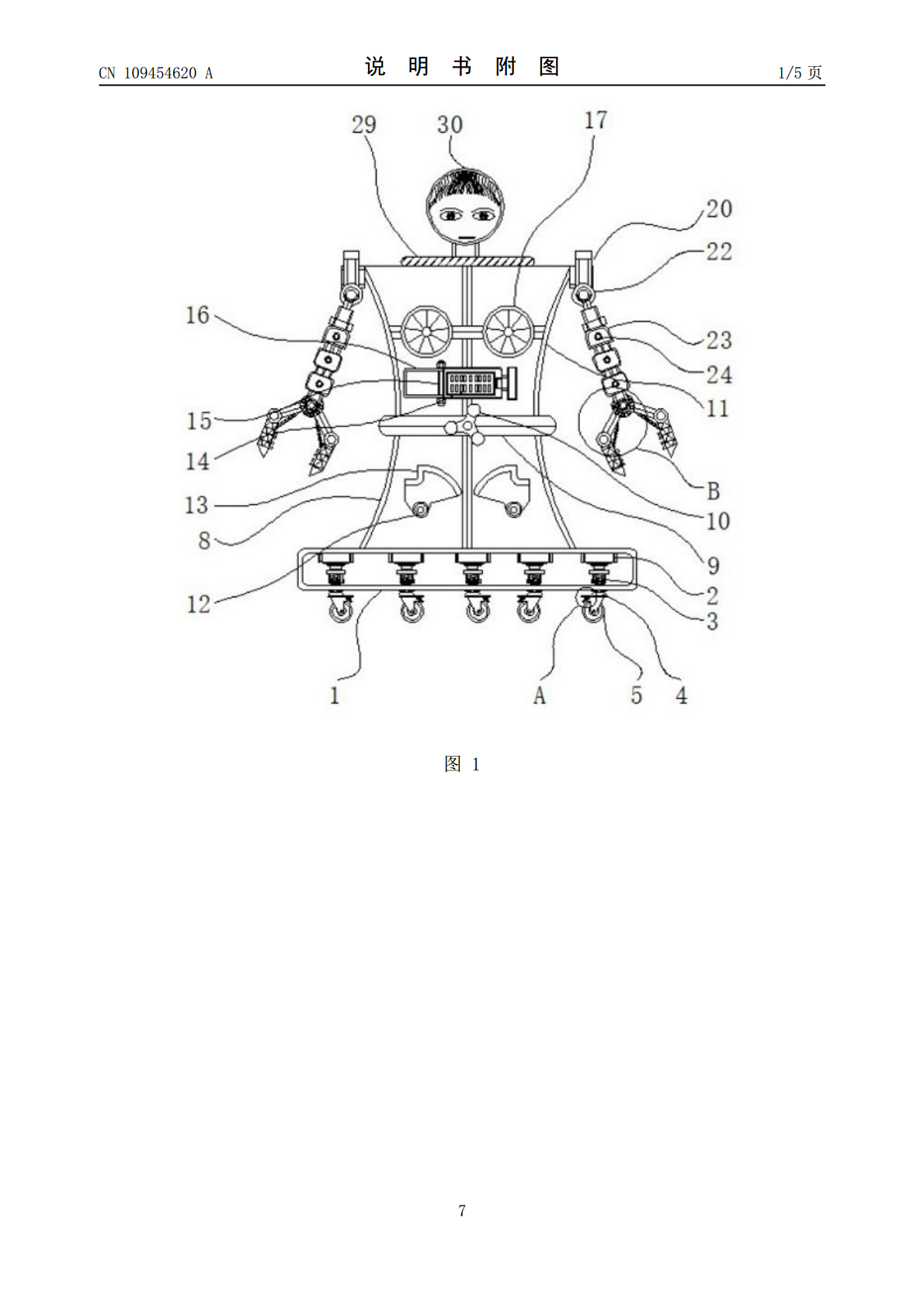
本发明涉及一种具有分辨方向可进行AI交互的机器人,包括底座、下体、主板和第一转轴,所述底座的内壁安装有微型电动机,且底座与微型电动机之间为螺母紧固,所述微型电动机的下方安装有第一弹簧,且第一弹簧的下方安装有转盘,所述转盘的下方安装有轮子,且转盘与轮子之间为固定连接,所述下体焊接于底座的上方,且下体的上方衔接有连接带,所述连接带的内部贯穿有限位块。本发明的有益效果是:该家用可自动覆盖型取暖器,设置有挡板,通过第二活动轴可挡板旋转一定的角度,从而使工作人员方便简捷的对主板进行一定程度的维修,同时挡板是由橡胶的

一种具有AI交互功能的微型投影仪.pdf
本发明公开了一种具有AI交互功能的微型投影仪,包括AI智能主控芯片、WIFI模块、蓝牙模块、USB接口、投影模块、激光投射模块、温度监测模块和智能闹钟模块,所述AI智能主控芯片用于处理并且执行整个具有AI交互功能的微型投影仪各个功能模块的数据,所述WIFI模块用于连接无线局域网络,无线传输投影信号,所述蓝牙模块用于无线连接外部蓝牙设备,无线传输投影信号;本发明减小了使用者的操作难度,而且方便提醒具体需要操作什么事情,并且可以同时设置多个闹钟,相比传统投影仪的一般闹钟更加具备实用性,避免了投影仪因长期使用导
一种内置应急电源的AI交互机器人.pdf
本发明公开了一种内置应急电源的AI交互机器人,涉及机器人技术领域,具体为底座和外壳,所述底座的中间安装有电机,且电机的外侧连接有驱动轮,所述驱动轮的下方设置有轮槽,且轮槽的外侧设置有底盘,所述底盘的中间设置有套圈,且套圈的内侧安装有转向轮,所述底座的外侧安装有橡胶套,所述外壳的左右两侧均安装有太阳能电池板,且外壳位于底座的上方,所述外壳中间设置有主机箱,且主机箱的正面设置有检修口,所述检修口的左侧设置有充电座,该内置应急电源的AI交互机器人,通过驱动轮进行移动,底座的左右两侧对称安装有两个驱动轮,可以通过

一种通过智能交互机器人进行交互的方法和系统.pdf
本发明的实施例提供一种通过智能交互机器人进行交互的方法,该方法包括,所述智能交互机器人与交互对象建立信息交互;远程终端与所述智能交互机器人之间建立通信通道;远程终端通过智能交互机器人与所述交互对象进行信息交互。采用了该实施例,第三方能够通过智能交互机器人与交互对象进行交流,尤其第三方以音频或者视频方式与交互对象交流,能够改变智能交互机器人仅作为一台机器给交互对象带来生硬的感觉,提高用户的感受度。
一种可进行方向转弯的具有防撞机构的移动式机器人.pdf
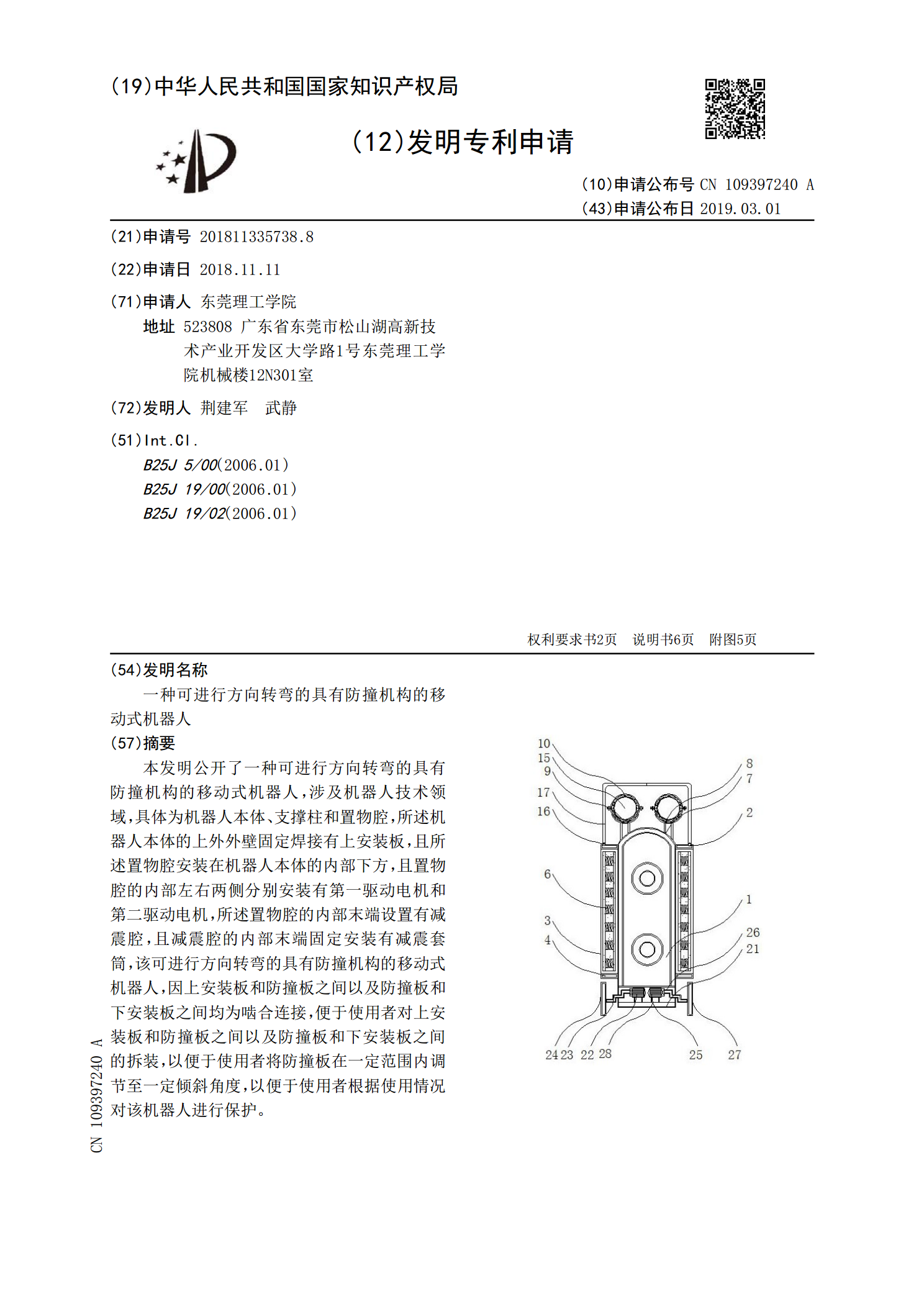
本发明公开了一种可进行方向转弯的具有防撞机构的移动式机器人,涉及机器人技术领域,具体为机器人本体、支撑柱和置物腔,所述机器人本体的上外外壁固定焊接有上安装板,且所述置物腔安装在机器人本体的内部下方,且置物腔的内部左右两侧分别安装有第一驱动电机和第二驱动电机,所述置物腔的内部末端设置有减震腔,且减震腔的内部末端固定安装有减震套筒,该可进行方向转弯的具有防撞机构的移动式机器人,因上安装板和防撞板之间以及防撞板和下安装板之间均为啮合连接,便于使用者对上安装板和防撞板之间以及防撞板和下安装板之间的拆装,以便于使用