
一种基于GPU并行加速的立体图像区域轮廓生成方法.pdf

努力****向丝

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于GPU并行加速的立体图像区域轮廓生成方法.pdf
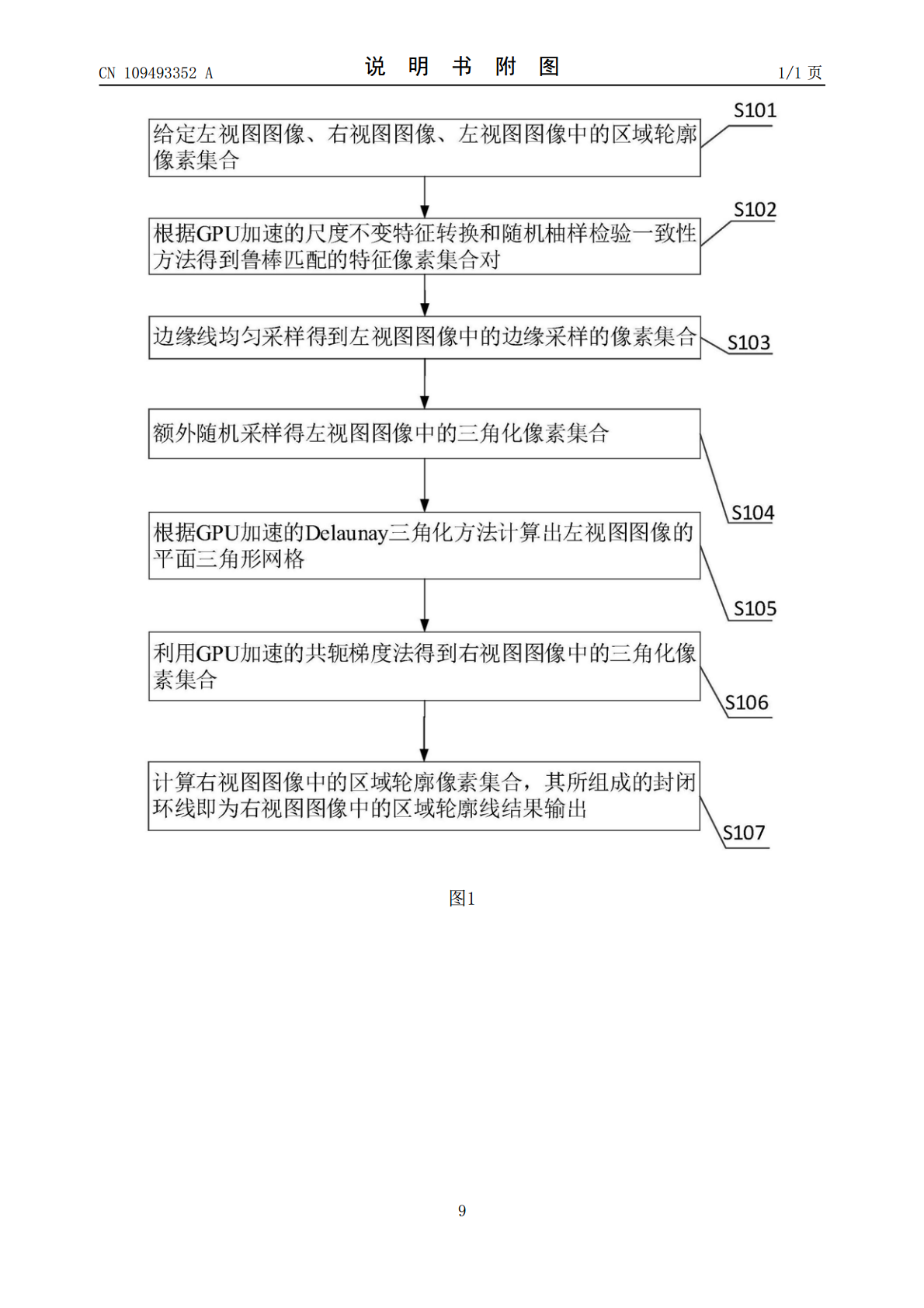
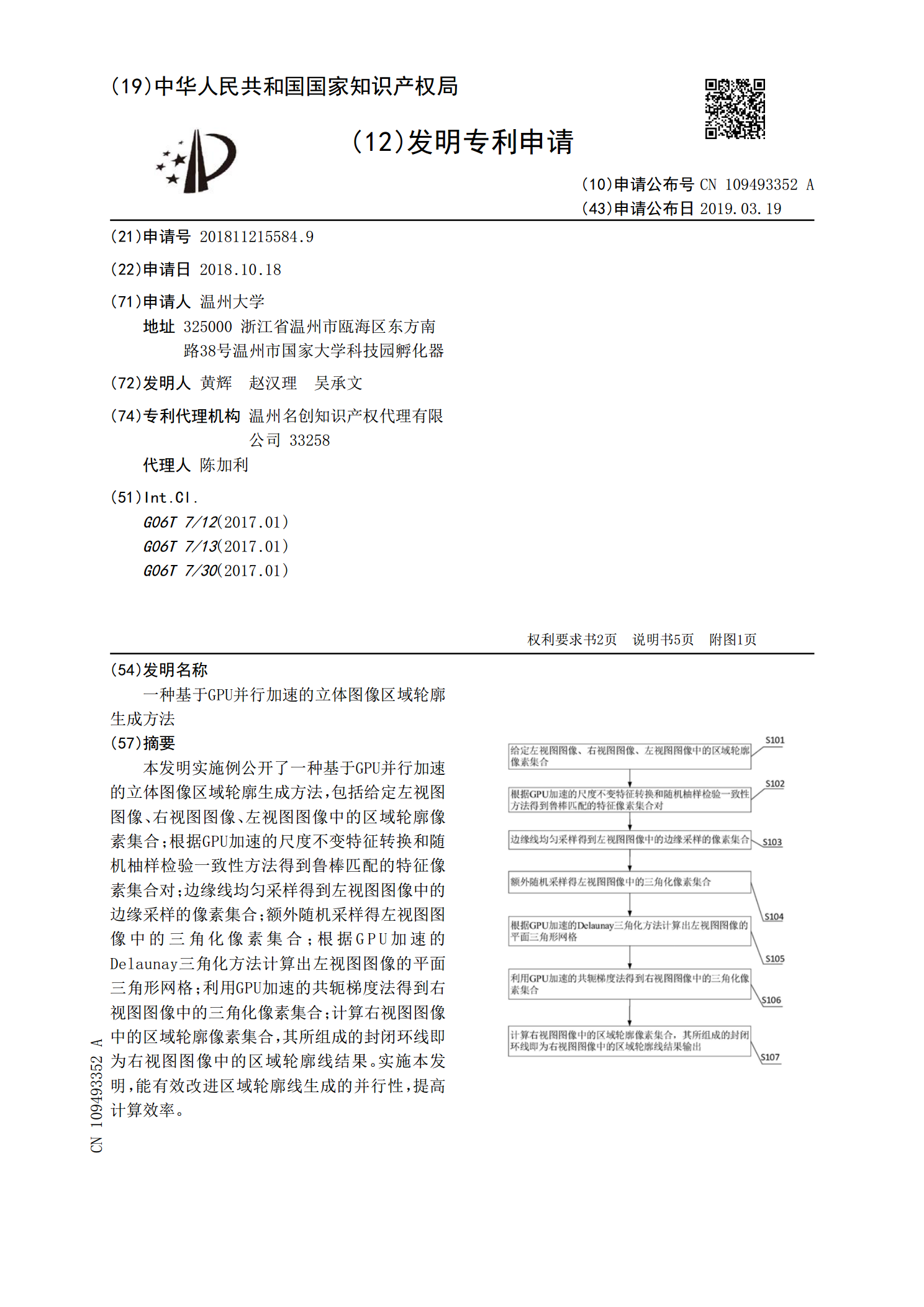
本发明实施例公开了一种基于GPU并行加速的立体图像区域轮廓生成方法,包括给定左视图图像、右视图图像、左视图图像中的区域轮廓像素集合;根据GPU加速的尺度不变特征转换和随机柚样检验一致性方法得到鲁棒匹配的特征像素集合对;边缘线均匀采样得到左视图图像中的边缘采样的像素集合;额外随机采样得左视图图像中的三角化像素集合;根据GPU加速的Delaunay三角化方法计算出左视图图像的平面三角形网格;利用GPU加速的共轭梯度法得到右视图图像中的三角化像素集合;计算右视图图像中的区域轮廓像素集合,其所组成的封闭环线即为右

一种基于GPU并行加速的快速建模方法.docx
一种基于GPU并行加速的快速建模方法在当今的计算机世界中,GPU并行计算技术已经成为了一种非常重要的计算方式,尤其是在深度学习、计算机视觉和自然语言处理等领域,GPU并行计算的加速效果非常明显。随着计算机硬件的不断升级和GPU并行计算技术的不断发展,越来越多的计算机应用程序开始采用GPU并行加速技术来提高计算性能。其中,一种基于GPU并行加速的快速建模方法逐渐被广泛采用。快速建模是一个非常重要的技术,它可以在较短的时间内构建出大量的模型,以便在不同的应用场景中进行测试和比较。快速建模技术可以应用于各种不同

基于GPU的并行遗传算法加速方法研究.docx
基于GPU的并行遗传算法加速方法研究摘要遗传算法是一种优化算法,被广泛应用于多种领域。但是,由于遗传算法需要进行大量的计算,单个计算节点的效率有限,因此神经网络算法无法满足实际应用的需求。因此,利用GPU实现并行计算,对加速遗传算法具有重要意义。本文介绍了在GPU上利用并行计算加速遗传算法的方法,并给出了实验结果。实验结果表明,利用GPU并行计算可以大幅度提高遗传算法的计算效率和优化能力。关键词:遗传算法;GPU;并行计算;加速引言遗传算法是模拟自然界进化过程的一种算法。其基本思想是通过对种群进行不同基因

基于GPU的并行加速渲染算法的研究.docx
基于GPU的并行加速渲染算法的研究随着计算机技术的不断发展,图形处理能力也在不断提高。GPU作为一种专门用于图形计算的处理器,其在图形渲染方面表现出色,已经成为了近年来图形渲染领域的主流。本文以基于GPU的并行加速渲染算法为研究对象,探讨了其在图形渲染领域的应用和发展。一、GPU的并行计算能力GPU全称为GraphicsProcessingUnit,即图形处理单元。它是一种集成了大量并行处理单元的处理器,专门用于加速图形和图像相关的计算,包括图像处理、深度学习、物理模拟等等。相比于传统的CPU,GPU拥有
一种基于GPU并行计算的实时阴影生成方法及系统.pdf
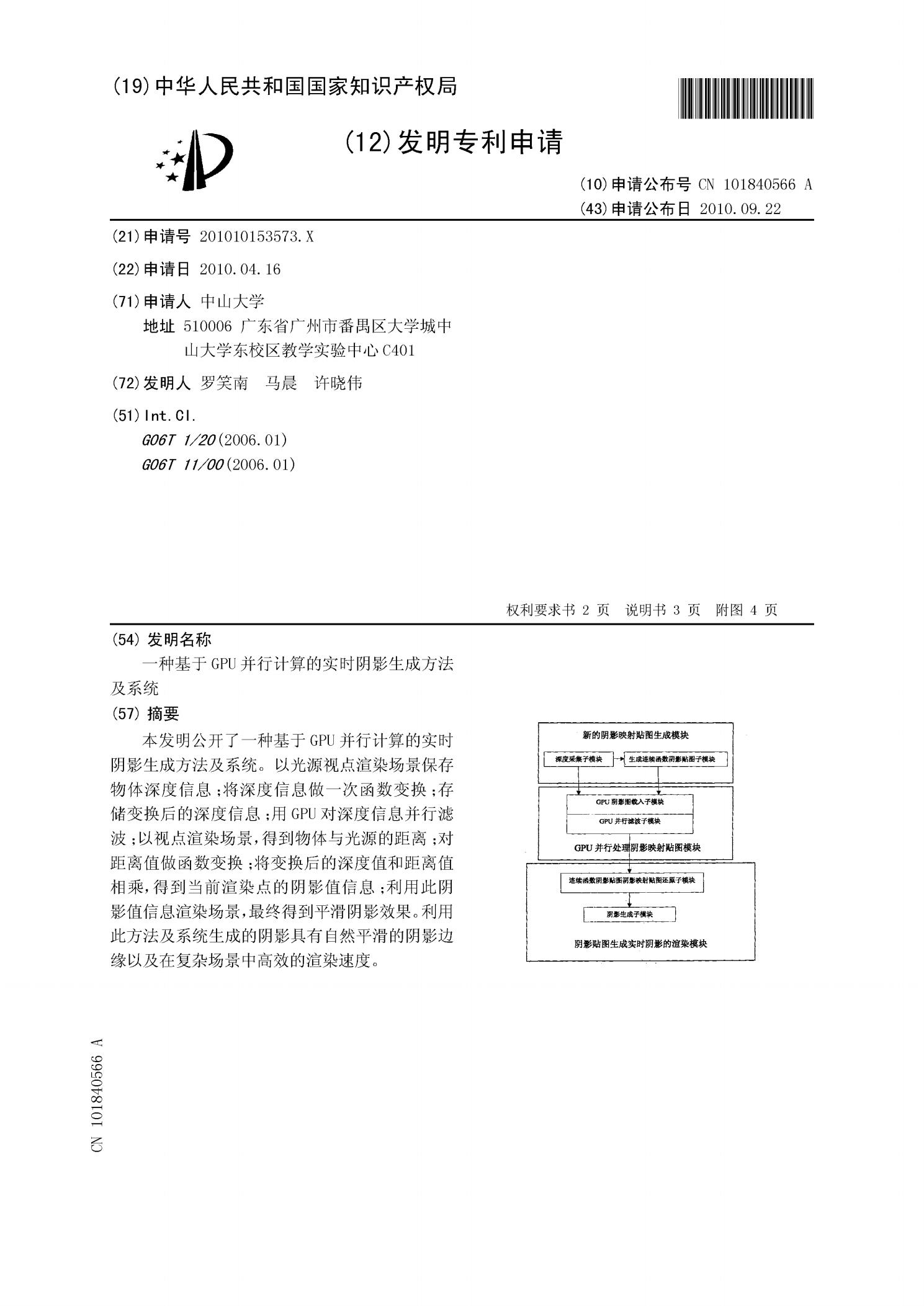
本发明公开了一种基于GPU并行计算的实时阴影生成方法及系统。以光源视点渲染场景保存物体深度信息;将深度信息做一次函数变换;存储变换后的深度信息;用GPU对深度信息并行滤波;以视点渲染场景,得到物体与光源的距离;对距离值做函数变换;将变换后的深度值和距离值相乘,得到当前渲染点的阴影值信息;利用此阴影值信息渲染场景,最终得到平滑阴影效果。利用此方法及系统生成的阴影具有自然平滑的阴影边缘以及在复杂场景中高效的渲染速度。