
爬升单元及爬升装置.pdf

雨巷****珺琦


1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
爬升单元及爬升装置.pdf
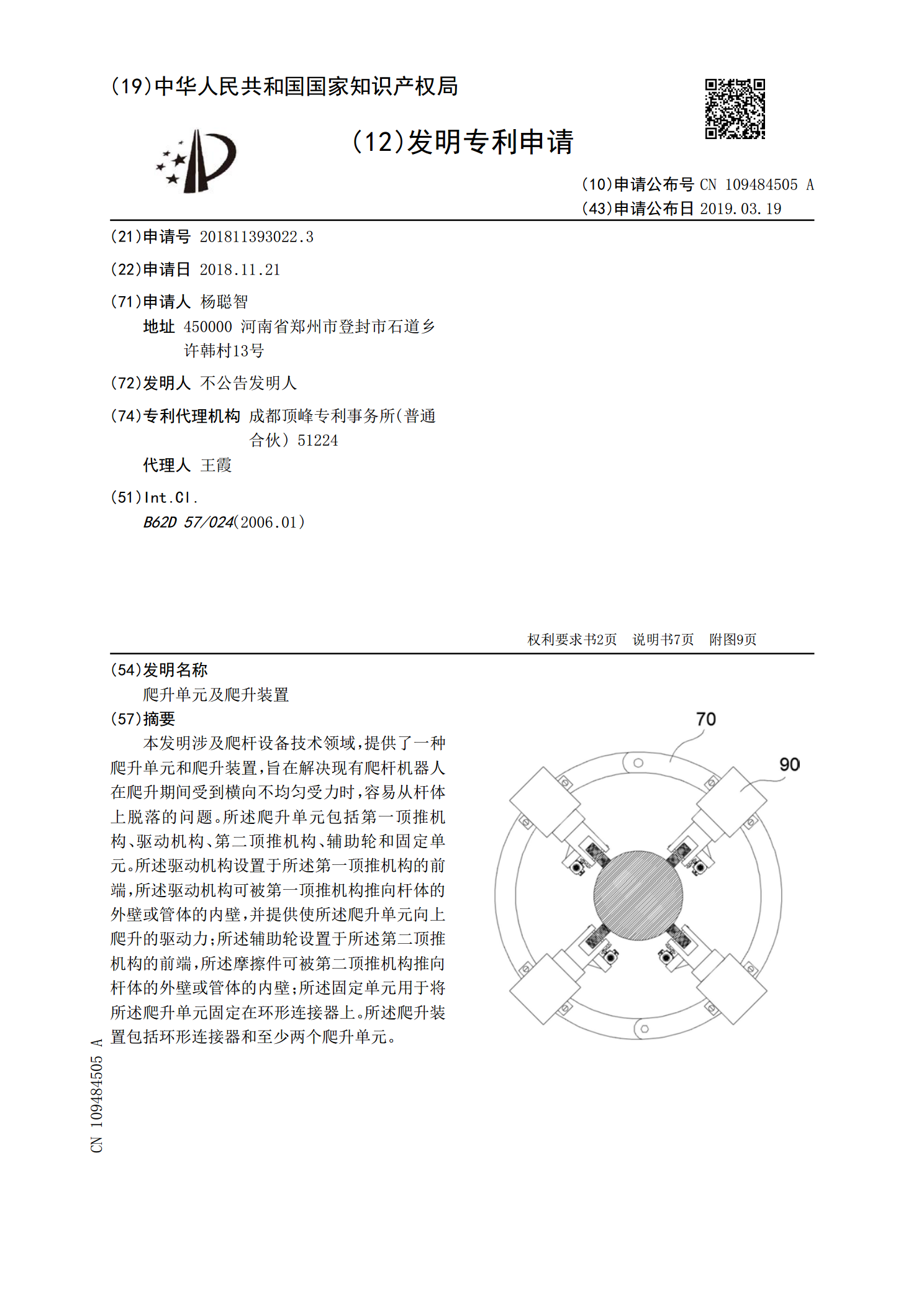
本发明涉及爬杆设备技术领域,提供了一种爬升单元和爬升装置,旨在解决现有爬杆机器人在爬升期间受到横向不均匀受力时,容易从杆体上脱落的问题。所述爬升单元包括第一顶推机构、驱动机构、第二顶推机构、辅助轮和固定单元。所述驱动机构设置于所述第一顶推机构的前端,所述驱动机构可被第一顶推机构推向杆体的外壁或管体的内壁,并提供使所述爬升单元向上爬升的驱动力;所述辅助轮设置于所述第二顶推机构的前端,所述摩擦件可被第二顶推机构推向杆体的外壁或管体的内壁;所述固定单元用于将所述爬升单元固定在环形连接器上。所述爬升装置包括环形连
液压爬升装置.pdf
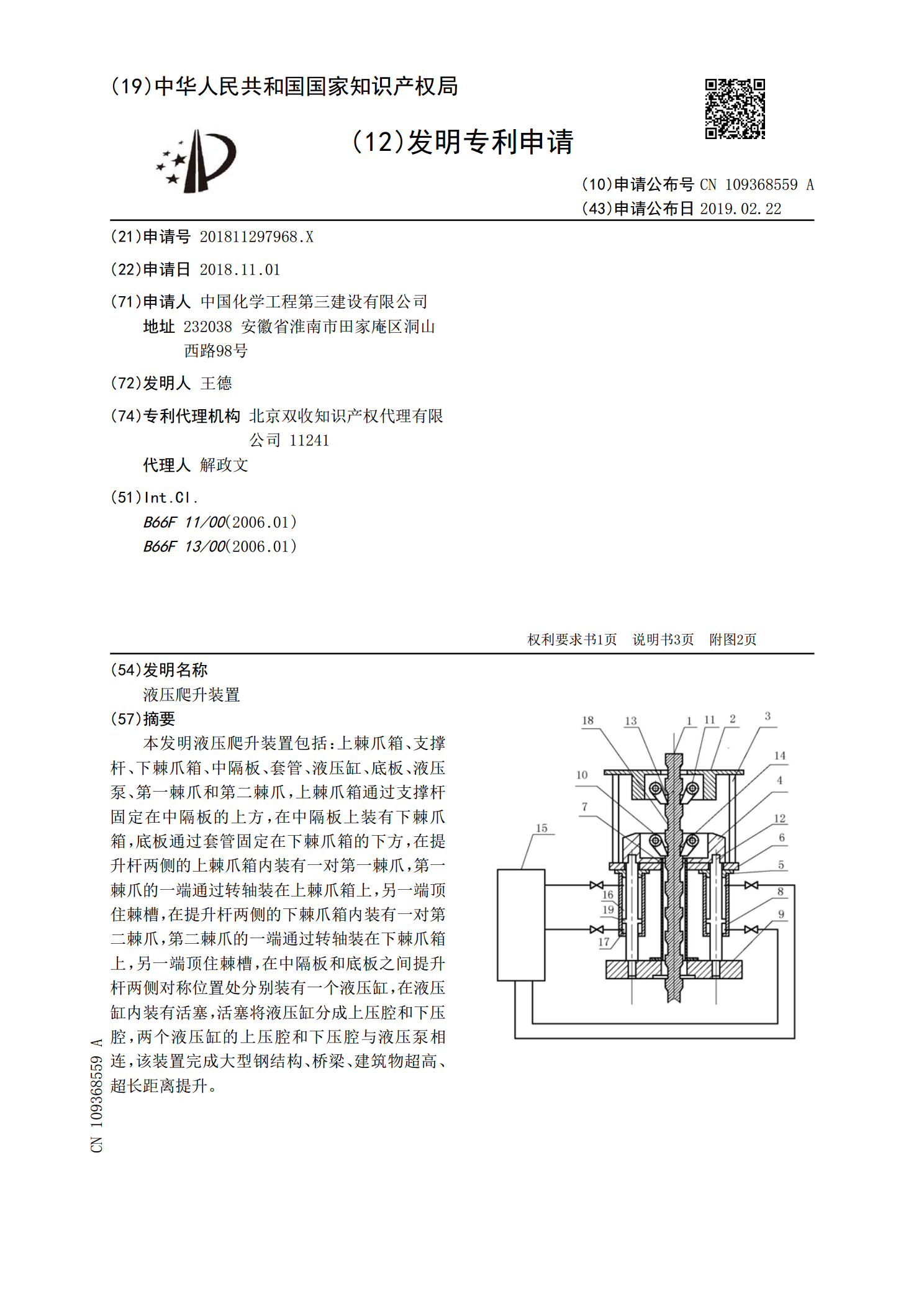
本发明液压爬升装置包括:上棘爪箱、支撑杆、下棘爪箱、中隔板、套管、液压缸、底板、液压泵、第一棘爪和第二棘爪,上棘爪箱通过支撑杆固定在中隔板的上方,在中隔板上装有下棘爪箱,底板通过套管固定在下棘爪箱的下方,在提升杆两侧的上棘爪箱内装有一对第一棘爪,第一棘爪的一端通过转轴装在上棘爪箱上,另一端顶住棘槽,在提升杆两侧的下棘爪箱内装有一对第二棘爪,第二棘爪的一端通过转轴装在下棘爪箱上,另一端顶住棘槽,在中隔板和底板之间提升杆两侧对称位置处分别装有一个液压缸,在液压缸内装有活塞,活塞将液压缸分成上压腔和下压腔,两个
井道自爬升装置.pdf
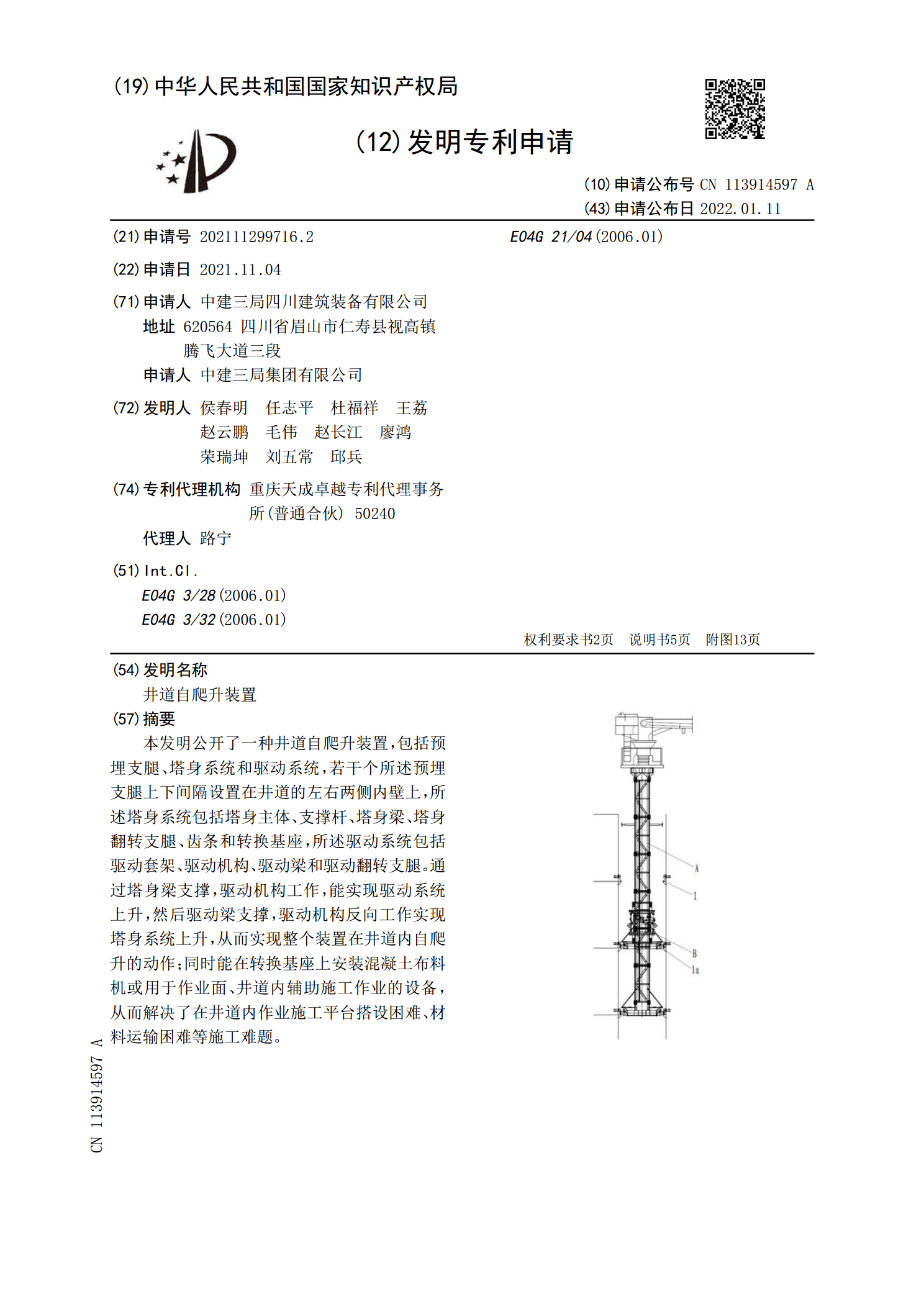
本发明公开了一种井道自爬升装置,包括预埋支腿、塔身系统和驱动系统,若干个所述预埋支腿上下间隔设置在井道的左右两侧内壁上,所述塔身系统包括塔身主体、支撑杆、塔身梁、塔身翻转支腿、齿条和转换基座,所述驱动系统包括驱动套架、驱动机构、驱动梁和驱动翻转支腿。通过塔身梁支撑,驱动机构工作,能实现驱动系统上升,然后驱动梁支撑,驱动机构反向工作实现塔身系统上升,从而实现整个装置在井道内自爬升的动作;同时能在转换基座上安装混凝土布料机或用于作业面、井道内辅助施工作业的设备,从而解决了在井道内作业施工平台搭设困难、材料运输

《爬升玩具》爬升原理PPT.pptx
爬升玩具老师今天给大家带来两只螃蟹爬升玩具,这种玩具在玩儿的时候,要先把一端固定好,再用双手拽住绳子向两边拉,玩具就会向前爬或向上升了。谁想来带它们比比赛?两只小螃蟹为什么有的快有的慢?怎么样的快?蟹小妹思考1、力的分解,力的方向改变了,从向上改为向两边分散。2、吸管贴成八字形的蟹小妹跑得快是因为吸管的方向和绳子的方向一致,减少了摩擦力。谢谢聆听

爬升装置及起重机.pdf
本发明提供了一种爬升装置及起重机。该爬升装置包括爬升主体、爬升组件、驱动系统:爬升主体设置有第一锁定件;爬升组件设置有第二锁定件;驱动系统包括第一传动轮、第二传动轮、链条和用于驱动第一传动轮或第二传动轮转动的驱动装置,第一传动轮位于或靠近爬升主体的一端,第二传动轮位于或靠近爬升主体的另一端,链条套设在第一传动轮和第二传动轮上,爬升组件与链条固连。本发明提供的爬升装置能够应用于塔式起重机中构成起重机,其能够满足既有多层建筑加装电梯工程吊装施工需求。