
一种欧拉旋转卫星姿态机动递阶饱和PID控制方法.pdf

运升****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种欧拉旋转卫星姿态机动递阶饱和PID控制方法.pdf
一种欧拉旋转卫星姿态机动递阶饱和PID控制方法,属于卫星姿态机动控制领域。本发明为了解决目前的卫星姿态机动递阶饱和PID控制方法无法实现三轴欧拉旋转的问题。本发明首先建立飞轮为执行机构的卫星姿态运动学和姿态动力学方程,然后分析飞轮系力矩包络特性,判断期望力矩穿过的菱形面,计算沿期望力矩方向上的飞轮最大输出力矩,确定最大飞轮力矩矢量。进而根据最大飞轮力矩矢量和机动角速度限制设计误差限制向量,设计递阶饱和PID控制器控制卫星三轴姿态。本发明可使飞轮在卫星大姿态偏差时发挥期望力矩方向的最大能力,从而逼近近时间最

基于飞轮的卫星绕瞬时欧拉轴逐次逼近姿态机动控制装置及其控制方法.pdf
基于飞轮的卫星绕瞬时欧拉轴逐次逼近姿态机动控制装置及其控制方法,它涉及卫星姿态调整的控制装置及其控制方法。它为解决采用喷气控制实现卫星大角度姿态机动存在的燃料消耗大,卫星的使用寿命短,且喷气的控制系统配置复杂,卫星的体积和重量都难以减小的问题而提出。先根据所述控制装置的系统要求,设定控制装置的参数,根据运动方程得出姿态偏差角速度;姿态误差四元数表达卫星当前姿态与目标姿态的瞬时欧拉轴和偏差角的关系得到控制信号再计算得出卫星控制器计算的飞轮控制输入力矩向量并作为反作用飞轮产生力矩所依据控制数据指令。它不消耗其

基于欧拉旋转的动能拦截器姿态控制方法.docx
基于欧拉旋转的动能拦截器姿态控制方法欧拉旋转法(EulerRotation)是一种描述方法,可以将物体的旋转运动分解为三个互相垂直的轴的旋转,即绕x轴、y轴、z轴的旋转。在机器人控制系统中,欧拉旋转法被广泛应用于机器人姿态控制,尤其是飞行器控制方面。本文将介绍一种基于欧拉旋转法的动能拦截器姿态控制方法。动能拦截器(KineticEnergyInterceptor)是一种高机动的战斗机,可以进行快速机动和高能力的战斗。该类战机需要具备高度的姿态控制能力,以便在高速飞行过程中能够应对各种复杂的飞行情况。欧拉旋

基于预置欧拉旋转的垂直姿态测量.docx
基于预置欧拉旋转的垂直姿态测量摘要:本论文探讨了基于预置欧拉旋转的垂直姿态测量。传统的姿态测量方法需要繁琐的参数校准和校正,而欧拉角旋转方法可以简洁地描述物体的旋转状态,且具有较强的可解释性和直观性。本文提出了一种新的基于预置欧拉角的垂直姿态测量方法,在实验中得到了良好的效果。关键词:姿态测量、欧拉角、预置、垂直1.引言姿态测量是机器视觉领域的一个重要课题。它对于诸如自主导航、工业自动化、装配与检测等领域的机器人应用有着至关重要的作用。目前,姿态测量的方法已经非常成熟,如云台姿态测量、电子指南针姿态测量、
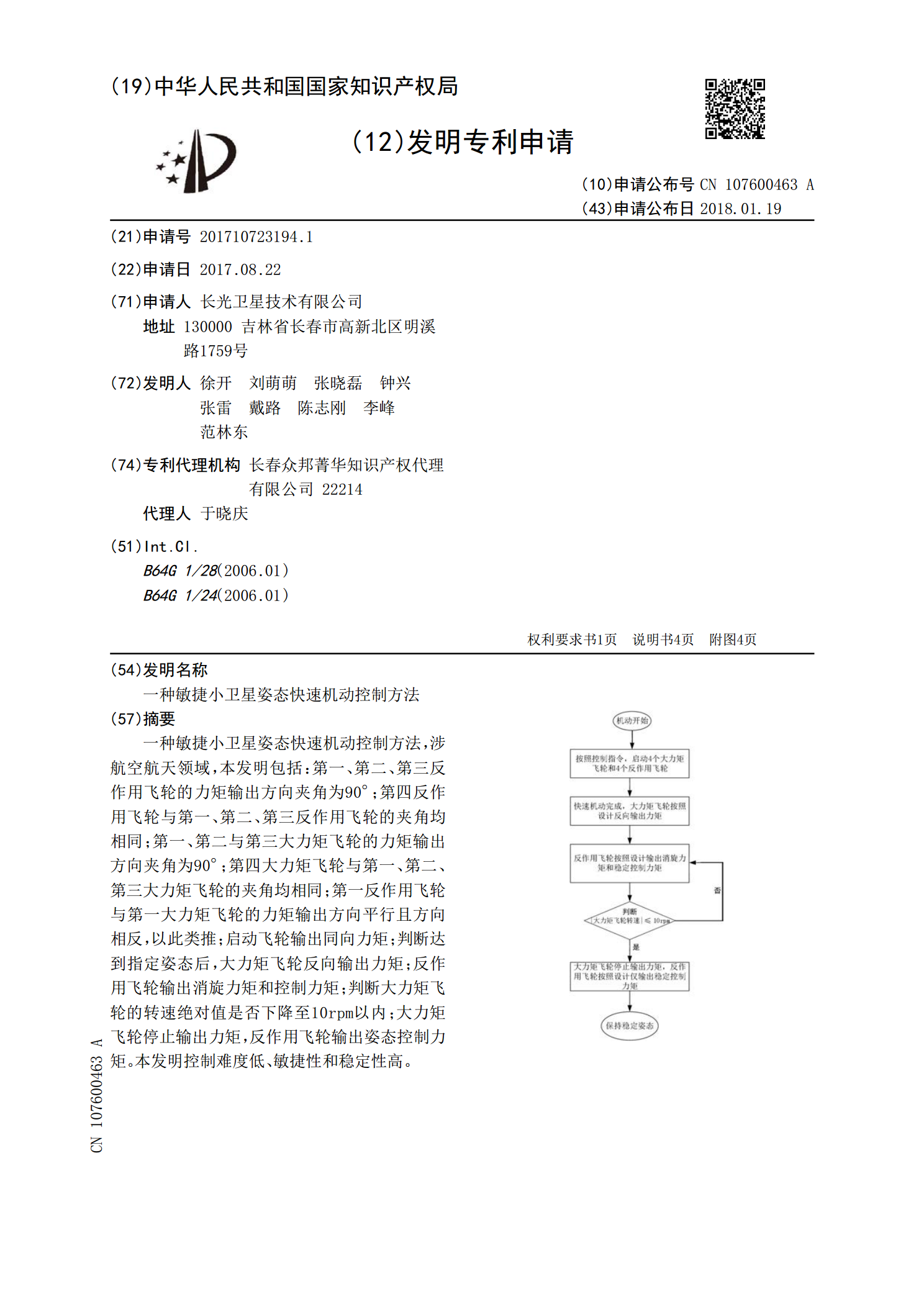
一种敏捷小卫星姿态快速机动控制方法.pdf
一种敏捷小卫星姿态快速机动控制方法,涉航空航天领域,本发明包括:第一、第二、第三反作用飞轮的力矩输出方向夹角为90°;第四反作用飞轮与第一、第二、第三反作用飞轮的夹角均相同;第一、第二与第三大力矩飞轮的力矩输出方向夹角为90°;第四大力矩飞轮与第一、第二、第三大力矩飞轮的夹角均相同;第一反作用飞轮与第一大力矩飞轮的力矩输出方向平行且方向相反,以此类推;启动飞轮输出同向力矩;判断达到指定姿态后,大力矩飞轮反向输出力矩;反作用飞轮输出消旋力矩和控制力矩;判断大力矩飞轮的转速绝对值是否下降至10rpm以内;大力