
基于CCD的自主式机器人寻迹方法研究及实现的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CCD的自主式机器人寻迹方法研究及实现的中期报告.docx
基于CCD的自主式机器人寻迹方法研究及实现的中期报告一、研究目的本研究旨在探究基于CCD的自主式机器人寻迹方法,实现机器人沿着预定的轨迹行动。二、研究内容1.研究基于CCD的自主式机器人寻迹方法的理论基础和技术原理;2.设计相应的硬件和软件系统;3.实验验证该方法的可行性和有效性。三、研究方法1.文献资料分析法:对相关文献的阅读和分析,总结相关理论和技术;2.实验室实验法:设计和搭建实验平台,进行实验验证。四、预期结果1.建立基于CCD的自主式机器人寻迹的理论模型;2.实现机器人寻迹的硬件和软件系统;3.

基于嵌入式Linux的自主寻迹机器人的研究的任务书.docx
基于嵌入式Linux的自主寻迹机器人的研究的任务书任务书背景与意义:现代社会其实已经处在了一个智能化、自动化的时代,在这样的情况下,自主寻迹机器人被广泛应用于各个领域中,比如在电力巡检、安保巡检、实验室自动化等方面都发挥了重要的作用。基于嵌入式Linux的自主寻迹机器人对于推进智能化、自动化的发展具有重要的意义,可以提高工作效率、降低成本、提高安全性等方面,被广泛用于实际工程中。任务描述:利用嵌入式Linux技术,设计并实现一个自主寻迹机器人系统,实现自动巡检、路径规划、障碍避免等功能。具体任务:1.系统

光电式自主寻迹小车控制系统设计与研究的中期报告.docx
光电式自主寻迹小车控制系统设计与研究的中期报告一、研究背景与意义随着现代自动化技术的不断发展,机器人技术在制造、医疗、救援等领域得到广泛应用。本项目旨在研制一款光电式自主寻迹小车,用于展示机器人技术的应用。本项目设计的光电式自主寻迹小车采用红外光电传感器作为检测模块,具有自主识别追踪黑线的功能。该小车可应用于制造业、物流业等行业,实现自动化生产和智能物流的目标。二、主要内容本研究中期报告主要包括以下内容:1、系统框架设计本项目采用基于单片机的控制系统,包括以下模块:红外光电传感器模块、电机驱动模块、控制器
基于CCD传感器的智能寻迹模型车的研究与实现.pdf
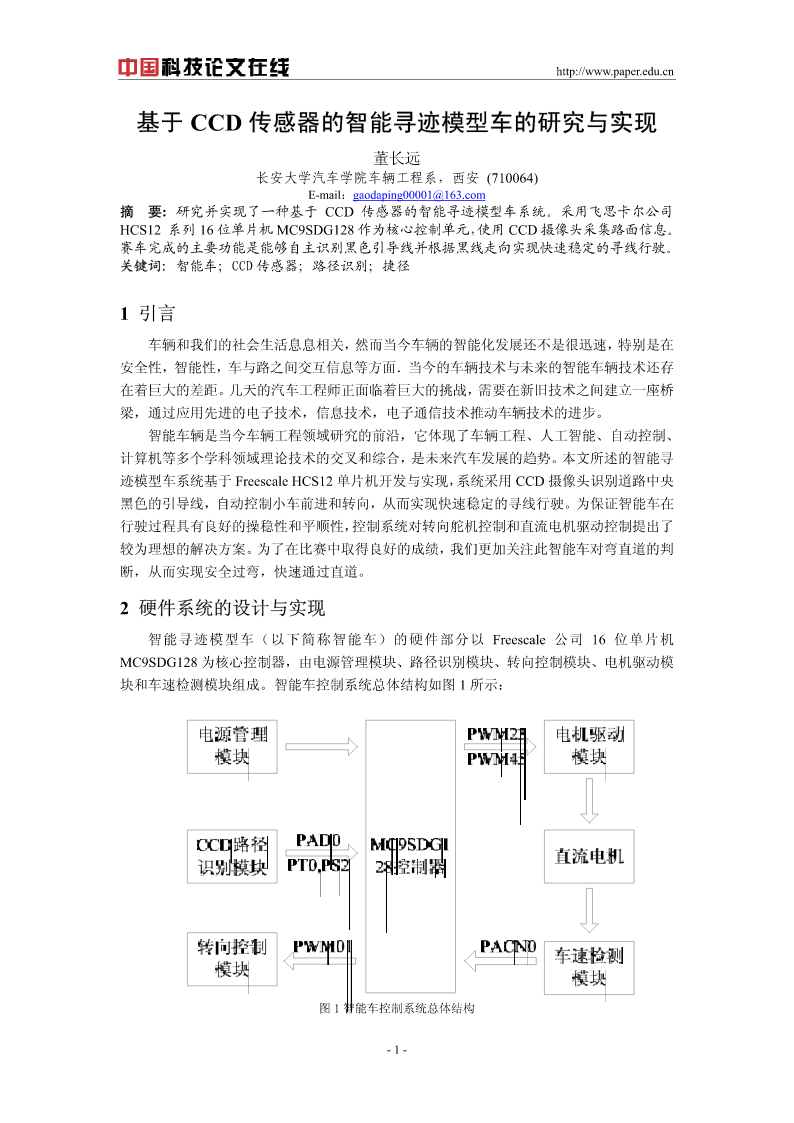
http://www.paper.edu.cn基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,西安(710064)E-mail:gaodaping00001@163.com摘要:研究并实现了一种基于CCD传感器的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。关键词:智能车;CCD传感器;路径识别;捷径1引言车辆和我们

自主式水下机器人上层决策系统的研究与实现的中期报告.docx
自主式水下机器人上层决策系统的研究与实现的中期报告一、研究背景水下机器人已经在海洋探测、潜水救援、海洋资源勘探等领域发挥着越来越重要的作用。然而,在实际应用中,由于水下环境复杂、控制难度大等原因,水下机器人多数情况下只能执行预设任务,缺乏主动性和适应性。因此,研究自主式水下机器人上层决策系统,强化其主动性和适应性,对于提高水下机器人的智能化水平和应用效果具有重要意义。二、研究内容本研究旨在研究和实现自主式水下机器人上层决策系统,包括以下内容:1.设计和开发水下机器人的建模和仿真环境,用于测试和验证自主决策